







一、原理
在实际应用中,由于摄像机镜头在制造中的缺陷以及在装配过程中的定位误差等原因,使用上述的线性模型不能够精确地描述成像几何关系,必须在其中加入非线性畸变参量。为了校正畸变误差,我们需要分析产生畸变的原因并对其在图像平面产生的效果建立数学模型。畸变一般包括径向畸变、离心畸变和薄棱镜畸变等。描述非线性畸变可如式2-14所示。

其中,(x~, y~)表示由线性模型计算出来的图像点坐标的理想值,(x, y)是实际的图像点的坐标,δx和δy是非线性畸变值。非线性畸变值与图像点在图像中的位置有关,可以用式2-15表示。

其中,δx和δy的第一项称为径向畸变,第二项称为离心畸变,第三项称为薄凌镜畸变,k1、k2、p1、p2、s1、s2称为非线性畸变参数。
二、备注
(x, y)是实际图像点的坐标即像平面坐标系,它和图像坐标系的转换如下图像所示。其中(u, v)表示图像坐标,(x', y')表示像平面坐标,x'y'坐标系原点定义在摄像机光轴与图像平面的交点(u0, v0)处,称为像主点。在x'轴和y'轴方向上像素之间的距离为Sx和Sy。则两坐标系之间的关系为:
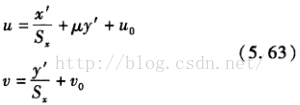
表示成矩阵形式:
















 2605
2605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









