



 本文详细介绍了机器人零点校正的重要性、方法及其对定位精度的影响,包括使用千分表和KUKAEMD的校正过程。同时,针对不同负载的机器人,提出了标准和带负载的校正方案。此外,还讲解了线性单元如KUKAKL-100的配置和Offset校准,确保与机器人同步控制的准确性。
本文详细介绍了机器人零点校正的重要性、方法及其对定位精度的影响,包括使用千分表和KUKAEMD的校正过程。同时,针对不同负载的机器人,提出了标准和带负载的校正方案。此外,还讲解了线性单元如KUKAKL-100的配置和Offset校准,确保与机器人同步控制的准确性。

精确零点校正不仅保证机器人程序轨迹的一致性,同时保证定位精确机器人或高精度机器人的绝对精度。

定位精确机器人需要较高的零点校正精度,以保证绝对精度。

机器人设定各轴的角度。各轴校零角度由变量 $MAMES[] 决定。(机器人系统自动完成)
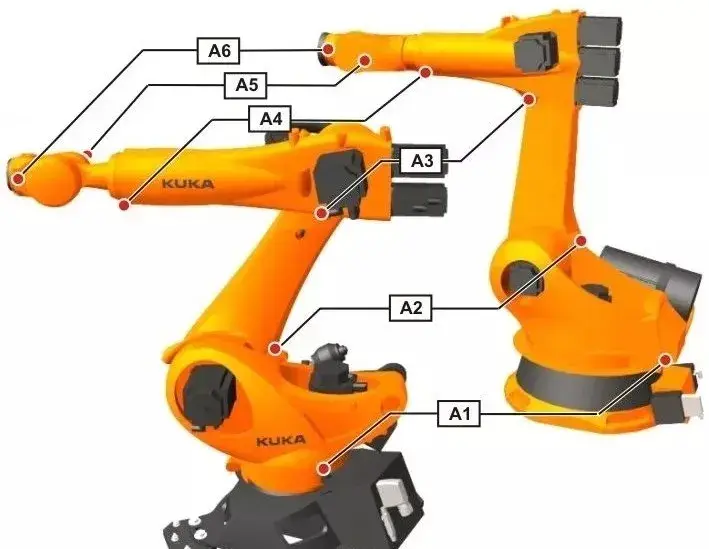
图说:根据零点探头及标记槽的位置不同,不同型号机器人的角度不尽相同。
记录校零当前电机角度。(机器人系统自动完成)
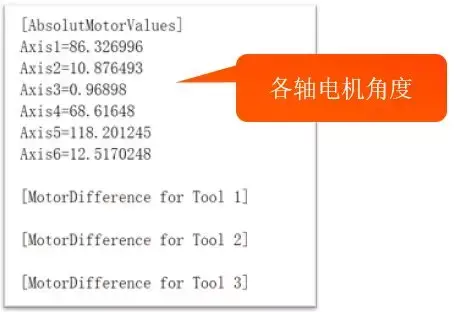
电机角度值将被存储到后台文件中,例如“653631.cal” (文件名为机器人序列号)
特别提示
● 零点校正需要借助工具千分表或者 KUKA EMD

KUKA EMD

千分表
注意:千分表校零点误差相对较大。人员测量误差、表针灵敏度等因素都会影响校零的精度。对程序轨迹要求较高时(如弧焊、折边等)不建议使用此方法。
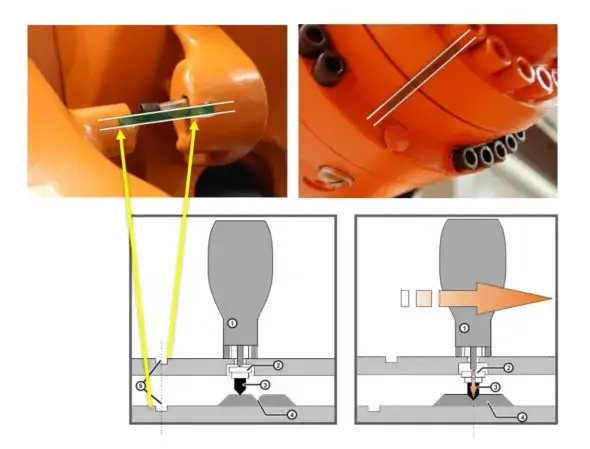
● 某些型号机器人A6轴没有安装零点探头,校零点时需要对齐刻线,用“参考法”校零。
零点校正实操
零点校正需要借助工具千分表或者 KUKA EMD,以及零点校正的两种不同方法,标准和带负载。
我们从理论转向实践
具体讲讲如何借助 KUKA EMD 执行
EMD零点校正的方法(标准)
❶ 将机器人所有轴运行到“预校正”位置
预校正位
❷ 将 EMD 依次安装到相应轴的零点探头上
(注意:当 EMD 安装入探头后,不能手动操作移动该轴。否则将损坏探头。)

进入菜单“执行零点校正 ”

选择需要校零的轴,点击“校正”键。
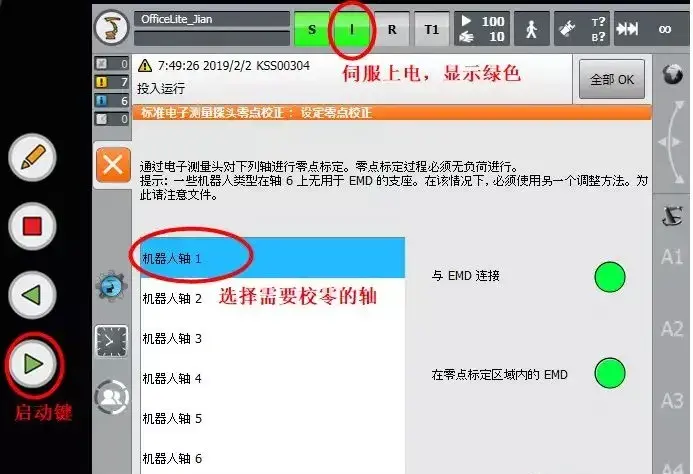
稍等2秒后按住使能键并保持,使伺服上电。
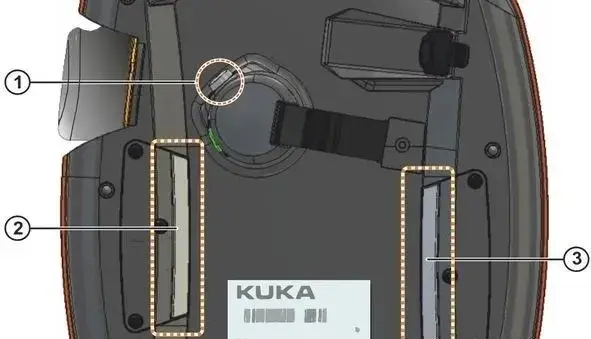
如上图,示教器背后有3个使能键。
再按住启动键并保持,机器人轴将慢速移动寻找零点标记槽。
❼ 完成后机器人将自动停机,届时再松开使能键以及启动键。
● 依次重复步骤2-7,完成每一个轴的零点校正。
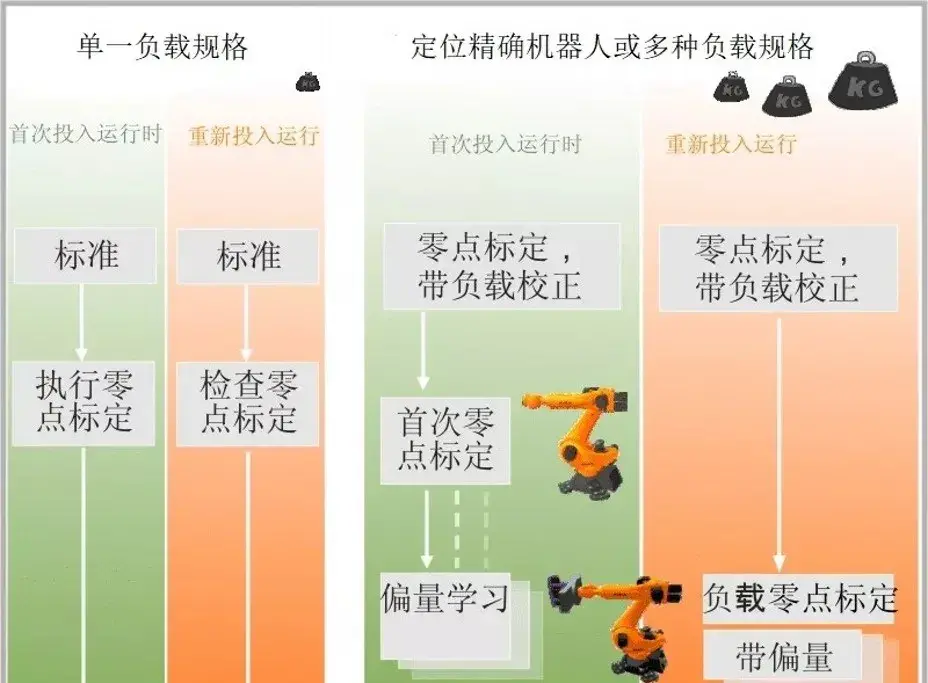
以上是标准式(即单一负载规格)的 EMD 校正零点的方法。
对于单一负载(标准)我们建议首次校正时带着负载校正,以后每次校正都带着相同的负载。
带负载机器人如何进行零点校正:
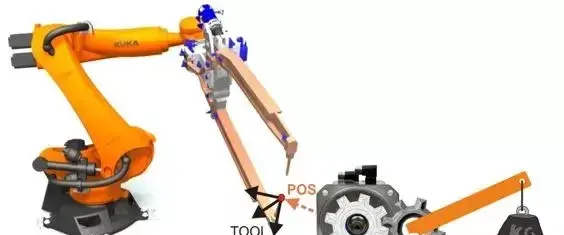
负载重力对零点校正的影响:当机器人加装工具等负载后,由于减速机刚性较弱以及齿轮传动间隙等因素,机器人轴会在重力作用下出现下沉现象。
因此,负载会影响机器人的零点校正。
正时负载如何处理?
需要事先拆卸吗?
请跟随小 KU 一起来学习吧!
零点校正时负载如何处理?
零点校正时,不需要也不建议拆卸负载工具;否则,拆装工具后TCP可能还要重新校准。
实际操作中,可以在机器人工具安装完毕之后,再进行零点校正工作。但以后重新校正零点或检查零点时,均需装载这一工具。如果把工具拆下了,机器人受力减少,轴会反弹回去,零点反而和装载着工具的时候出现差异了。
所以,零点校正时机器人负载状态需要保持一致。
举例来讲:
A机器人首次使用时是空载校零的,那以后零点校正时均需保持空载;
B机器人首次使用时是带着一个工具校零的,那以后零点校正时均需装上此工具。
提问
C机器人工作时会用到三个不同重量的工具:Tool1、Tool2、Tool3,零点校正时又该如何操作呢?
回答
此时,空载校零虽说可以达到预期目的,但操作上比较麻烦:每次重新校正零点或检查零点时必须拆下工具,这增加了操作员的工作量。
为了避免上述麻烦,
小 KU 分享另一套解决方案:
带负载校正,让操作更便捷
KUKA 系统中“带负载校正”的零点校正方案,巧妙解决了三个工具重量不同的这一问题。
操作步骤
❶ 首先,机器人保持空载,进入“首次调整”功能进行零点校正。(如果有类似换枪盘等重量较轻的工具也可以安装好后进行“首次调整”。)

❷ 依次安装每个工具,分别进入“偏量学习”,并按照提示点击每个轴进行“学习”。(每个工具需分别进行一次6个轴的偏量学习。)
完成以上两步,便完成了零点校正。具体操作细节,请参照 KUKA 微校 | 第二课中步骤1-7。
注意: “绝对精度机器人(有PID文件的机器人)”必须采用空载校零,或者带着工具的采用“带负载校正”方案进行校零操作,否则会影响其绝对精度。
通过“带负载校正”方案进行零点校正的机器人,在后期维护中需要重新校正零点或者检查零点时,便可装载接受偏量学习“训练”后的任何工具,进入“负载校正——带偏量 ”模式,进行重新校零或检查零点。
注意事项
1)采用“带偏量”功能校正零点或检查零点时,系统会自动剔除因工具重力产生的偏量值,确保与空载校零时的负载状态一致。
2)“无偏量”功能,仅适用于人为误删零点或电气原因(譬如RDC卡故障、突然断电)导致零点丢失的情况下恢复原有的零点校正值,而不允许用于更换电机、齿轮箱或机械拆装等情况。
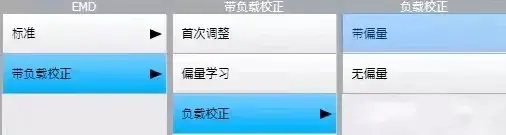
最后,送大家一张 EMD 校正零点的方法总结图,拿好不谢!
“线性单元的配置”
为了实操性更强些,我们就以“使用 KUKA KL-100 配置运动系统”作为示例来讲解。
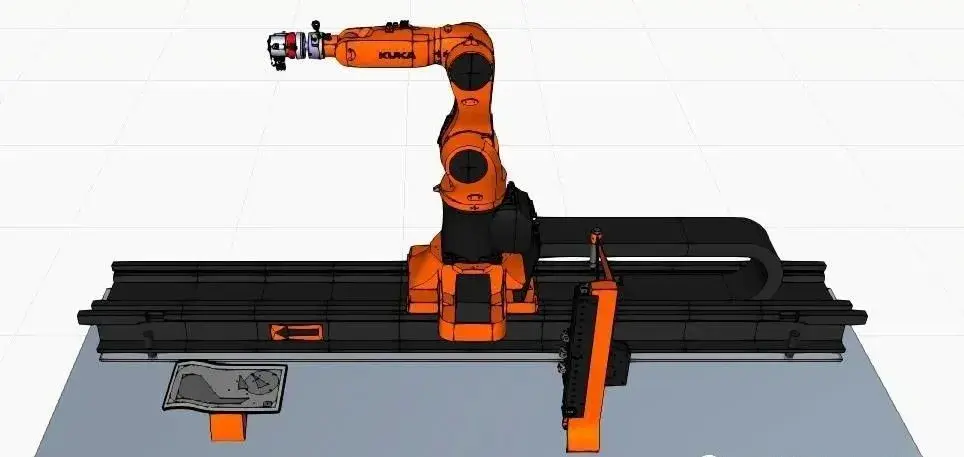
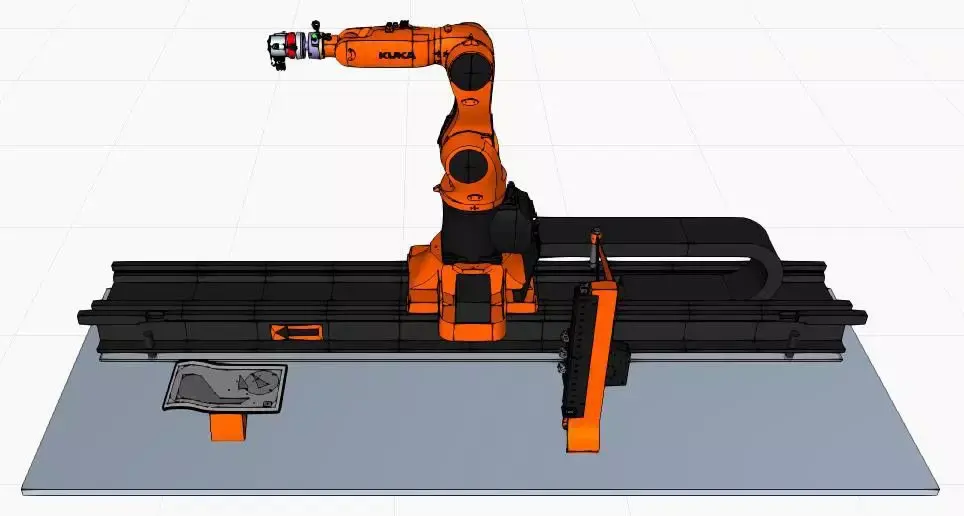
KUKA KL-100线性滑轨
KUKA 线性滑轨 KL 100 是一个安装在地面、天花板或墙壁上的独立单轴线性滑轨。在搬运、装卸、塑料加工、检测或检验等领域应用非常广泛。
KL 100 作为机器人的附加轴运行,适用于 KR AGILUS 系列的所有机器人。由此,控制就由相应的机器人控制器负责执行。
话不多说,赶紧干活~
配置目标
将 KR AGILUS 系列中的 KR 6 R700 sixx 机器人安装在 KUKA 的 KL-100 导轨上,配置 ROBROOT 运动系统后,可以使直线导轨和机器人实现同步控制。
怎么做?看这里!
使用WorkVisual配置线性单元,So easy↓↓↓
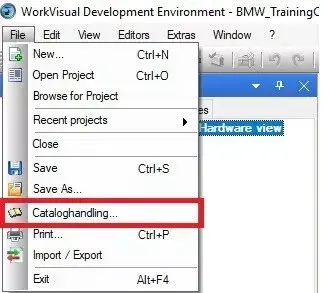
Step 1 点击文件→目录管理
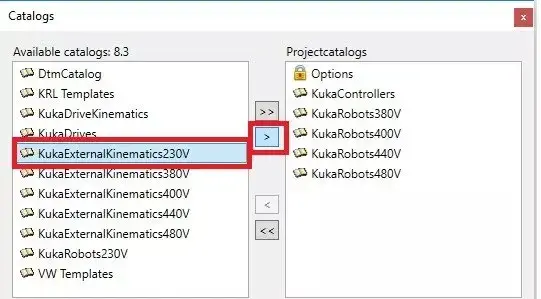
Step 2 选择KukaExternalKinematics230V 点击单个箭头,添加到现有目录
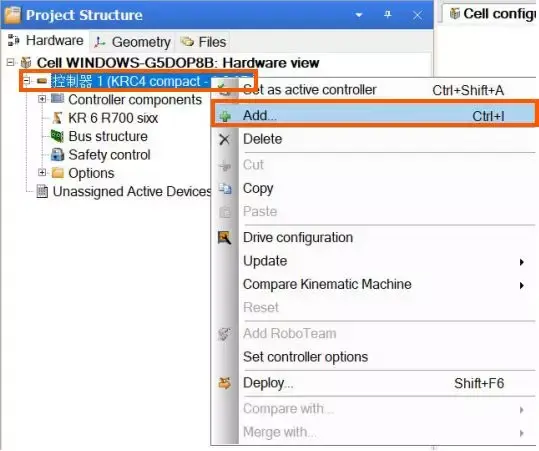
Step 3 右点击项目结构→添加
Step 4 选择KukaExternalKinematics230V → KL100 → Add
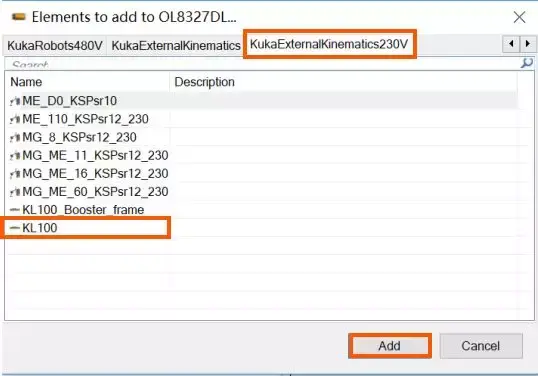
Step 5 KL100就添加进入项目结构

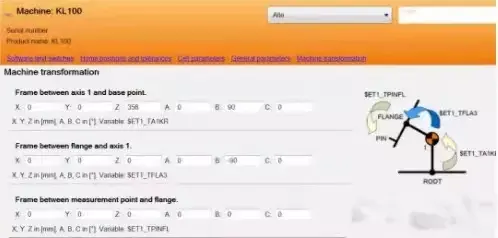
Step 6 将转换关系如右图填入KL100的参数里。
Step 7 再把项目下载到机器人控制柜
“线性单元的Offset校准”
可能出现的问题
正常情况线性单元不需要特别校准。在 WorkVisual 配置好 ROBROOT 运动系统的转换数值即可。
但有时候在使用直线轴测试外部运动系统时,可能工具的 TCP 位置会出现少量的变化,在某些特殊应用要求程序轨迹精度比较高的应用场合,就无法达到客户要求(比如摆动应用等)。
问题分析
理想情况下,机器人的 ROBROOT 坐标系应与线性单元的 FLANGE 坐标系相同。实际上,通常会出现安装误差,导致这两个坐标系会存在轻微的差异,这意味着使用外部轴运动坐标系时 TCP 的位置会出现偏差。如果在机器人控制器里安装了 KSS 8.3,则可以通过线性单元的 Offset 校准,来对这些差异进行示教校正。
接下来进入实操环节
在具体的校准操作上,我们同样使用 KUKA KL‐100 配置运动系统来示例。
线性单元的 Offset 校准——标定步骤:
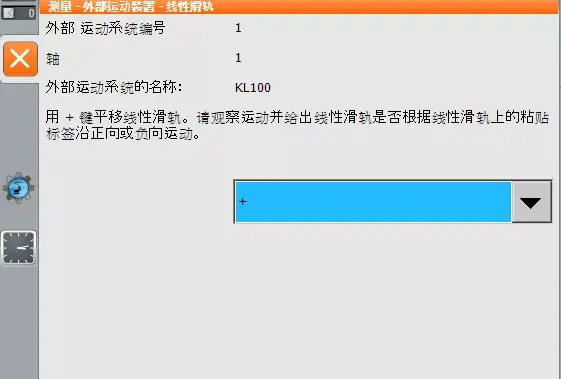
Step1 点击菜单:投入运行→测量→外部运动装置→线性滑轨

Step2 选好参考工具,点击按钮继续。

Step3 确定好线性滑轨的移动方向,点击按钮继续。
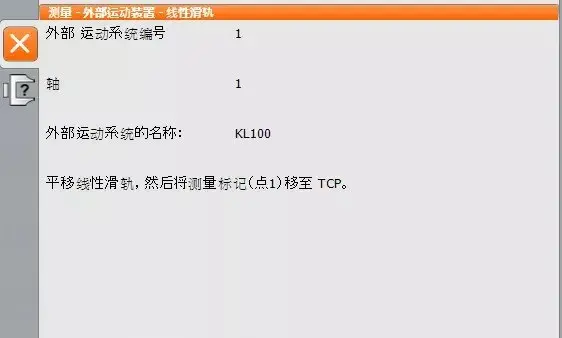
Step4 移动参考工具TCP到参考点,点击按钮测量。
将测量工具的TCP从3个不同外部轴位置,移向设定的参考点。

机器人控制系统从三个不同的位置中计算出Offset。
Step5 在弹出的窗口,点击按钮是。
Step6 再重复第4步-第5步两次,就会出现下图的测量结果,点击按钮保存。

同样不能遗漏的是,在进行具体操作前,你要确保四件事:
1. 已在WorkVisual配置好相关外部轴, 将其加载到机器人控制器中。
2. 先前校准过的工具安装在安装法兰上。
3. 没有打开或选择任何程序。
4. T1模式
文章来源:网路
声明:本文所使用视频、图片、文字如涉及作品版权问题 ,请第一时间告知,我们将根据您提供的证明材料确认版权并立即删除文章!

















 2698
2698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









