







内容根据秦磊华《计算机组成原理》正文及习题和华科大网课及习题整理而来。
存储器
-
随机存储器(RAM)是指存储单元的内容可按需随机取出或存入,且存取的速度与存储单元的位置无关的存储器。
-
顺序存储器(SAM)是指存储单元的内容只能依地址顺序访问,且访问的速度与存储单元的位置有关的存储器,如磁带存储器就是顺序存储器。
-
直接存取存储器(DAM)是指既不像随机存储器那样能随机地访问任一存储单元,也不像顺序存储那样完全按顺序访问存储单元的一类存储器。这类存储器兼有随机存储器和顺序存储器的访问特性。磁盘属于直接存储器,寻道和找扇区的过程与RAM相似,在扇区内读写数据的过程同SAM相似。
-
读写存储器和只读存储器(ROM)随机存储器是既能读出又能写入信息的存储器,故称为读写存储器。而有些存储器中的内容不允许随意改变,只能读出其中的内容,这种存储器称为只读存储器。
-
哈弗结构是指数据和指令分别存放,这也是第一级缓存的构造原理。
-
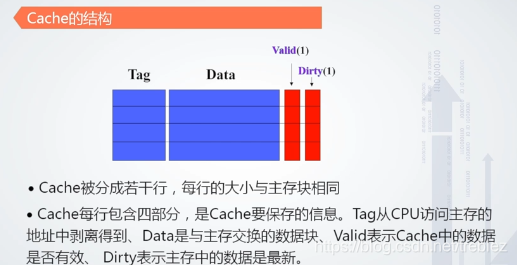
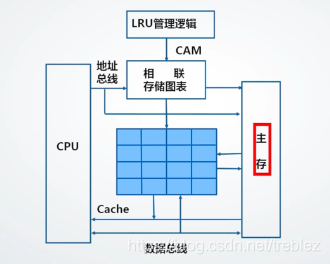
存储系统层次结构由Cache 、主存、辅助存储器三级体系构成
-
位扩展:地址线并联,数据线串联,片选线直接相连;字扩展:数据线并联,地址线并联,片选线分别接到地址译码器的输出端
-
局部性原理:时间局部性——现在被访问的信息不久以后还再次被访问;空间局部性——现在访问的信息的周围信息将在将来被访问
-
存储字长是一个单元能存放的二进制位数的最大值;一般应该是字节的整数倍,与存放的数据类型无关‘
-
-
寻址范围=存储器容量/字长换算得到的字节数
-
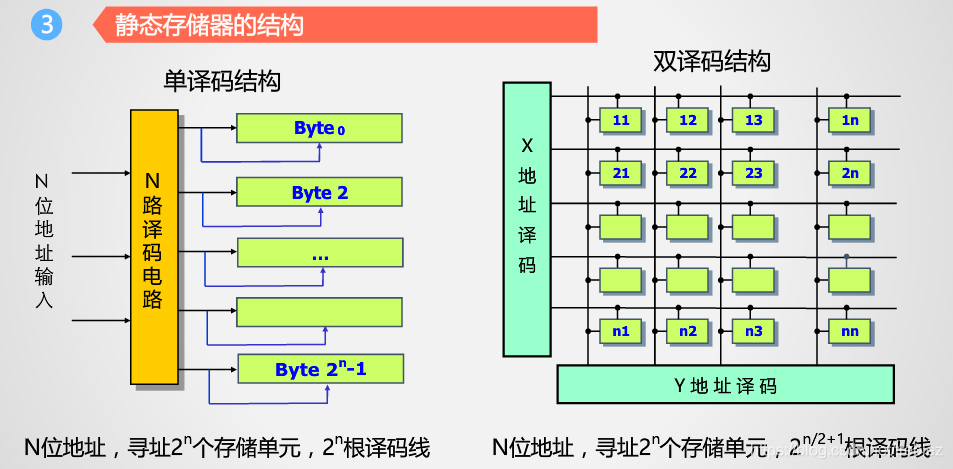
访问16K的空间需要多少根地址总线?16000=11111010000000答案是14根
-
访问16K的空间需要多少根译码输出线?
由上图可知,需要2^8根 -
动态存储器为什么比静态存储器更慢?
答:首先,静态存储器的主要原件是三极管,而动态存储器的主要原件是电容,相对于电容三极管更加灵敏;其次,对于输出信息方面,动态存储器是通过测量电容电压相对于边界电压大小来判断输出是0还是1,而静态存储器只需要测量输出电压和标准0福特电压的相对大小(正负)就可以得到输出;最后,静态存储器有持续供电,信息存储时效长,而动态存储器需要通过刷新来补充电荷,每次读写需要花费一定时间。 -
计数器的模就是计数器输出的状态数目
-
DRAM地址线做了复用,只需要SRAM的一半即可
-
集中刷新保持了存储器的高速特性,不足是存在死时间;异步刷新方式既保持了存储单体的高速特性,也不存在死时间
-
只做位扩展时,所有存储芯片的片选信号都固定接0;根据字扩展选择片选信号的位数
-
读操作也具有刷新功能
-
DRAM三种刷新方式的比较
- 集中式刷新:刷新方式为前面的时间一直进行读取操作,后面的时间进行刷新。例如:对
64*64的矩阵刷新,存取周期是0.5us,刷新周期为2ms存取一次的时间=刷新一次的时间,那么刷新完64行需要的时间为:64*0.5=32us,说明这32us里不能进行读写操作 - 分散式刷新:它扩大了读写周期,也就是说读一次需要时间为0.5us的话,那么一次的读写周期为1us,因为它包含了刷新用的0.5us。
- 异步式刷新:它将每一行的刷新都分开来,也就是说只要在规定的时间完成对每一行一次的刷新就行了,(2ms/64)间隔进行一次刷新,这里的2ms是规定的,因为DRAM要求,至少2ms更新所有行一次。所以不存在死时间
-
SRAM不管存储什么始终处于有两个晶体管处于饱和导通状态
-
-
-
直接映射、全相连映射、组相连映射的区别:https://blog.csdn.net/dongyanxia1000/article/details/53392315
-
A.全相联映射方式下,将地址划分为主存块地址和块内偏移地址两部分
B.直接相联映射方式下,根据Cache大小将地址划分为标记(Tag)、索引(Index)和块内偏移地址三部分。其中Index指向Cache特定行位置
C.组相联映射方式下,根据Cache 分组数大小将地址划分为标记(Tag)、索引(Index)和块内偏移地址三部分。其中Index指向Cache特定组位置 -
几种常见的替换算法
先进先出法-FIFO(First in First out)
最不经常使用法–LFU(Least Frequently Used)
近期最少使用法—LRU(Least recently used)
随机替换法 -
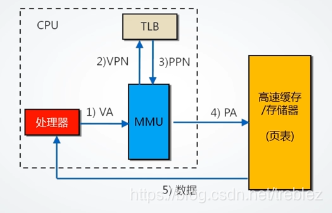
MMU——管理虚拟存储器和物理存储器
-
页式虚拟存储器中,虚拟页的容量与主存物理块的容量相同
-
VPN-虚页号,VPO-页内偏移,VPN分为TLB tag(判断与虚页对应的物理页是否存在)和TLB Index PPN-物理页号 PPO页内偏移地址 VA虚地址 PA物理地址
-
-
习题
记载了课本全部习题。

















 2475
2475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









