







目录
1 概念讲解及用处
轮廓外接矩形是指能够包围一个轮廓的最小面积矩形。它可以通过计算轮廓点集的几何特征来获得,通常用于轮廓的定位、识别和分析。
轮廓外接矩形有两种类型:
最小外接矩形(RotatedRect):以矩形中心点、矩形大小和旋转角度来定义的矩形。
矩形边界框(Rect):以左上角坐标和矩形的宽高来定义的矩形。
轮廓外接矩形在计算机视觉和图像处理中具有广泛的应用,例如:
目标检测和跟踪:用于定位目标并跟踪它们的位置。
边界框标注:用于标记和分割图像中的对象。
特征提取:用于提取轮廓的形状和方向信息。
2 函数详解
OpenCV提供了几个函数来计算轮廓的外接矩形。
2.1 minAreaRect()
RotatedRect minAreaRect(
InputArray points
);
points:输入参数,表示要计算最小外接矩形的数据点集。通常是由findContours()函数返回的轮廓点集。
返回值:一个RotatedRect类型的对象,表示计算得到的最小外接矩形。2.2 boundingRect()
Rect boundingRect(
InputArray points
);
points:输入参数,表示要计算边界框的数据点集。通常是由findContours()函数返回的轮廓点集。
返回值:一个Rect类型的对象,表示计算得到的边界框。3 数学原理及数学推导公式
最小外接矩形的数学原理基于主成分分析(Principal Component Analysis,简称PCA)。它采用了协方差矩阵和特征值分解的概念。
矩形的中心点可以通过计算轮廓点集的均值来获得。然后,通过计算协方差矩阵,找到与该矩阵相关的特征向量和特征值。这些特征向量可以用来定义矩形的旋转角度。最后,根据特征向量和特征值确定矩形的大小。
数学推导公式较为复杂,超出了本回答的范围。如果您对数学原理感兴趣,建议查阅相关资料或学术文献。
4 用C++编写代码进行实现
以下是一个使用OpenCV计算轮廓外接矩形的示例代码:
#include <opencv2/opencv.hpp>
using namespace cv;
int main()
{
// 读取图像并进行预处理
Mat image = imread("image.jpg", IMREAD_GRAYSCALE);
threshold(image, image, 128, 255, THRESH_BINARY);
// 寻找轮廓
std::vector<std::vector<Point>> contours;
findContours(image, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// 计算最小外接矩形
RotatedRect rect = minAreaRect(contours[0]);
// 计算边界框
Rect boundingBox = boundingRect(contours[0]);
// 绘制最小外接矩形和边界框
Mat result;
cvtColor(image, result, COLOR_GRAY2BGR);
Point2f rectPoints[4];
rect.points(rectPoints);
for (int i = 0; i < 4; i++) {
line(result, rectPoints[i], rectPoints[(i + 1) % 4], Scalar(0, 0, 255), 2);
}
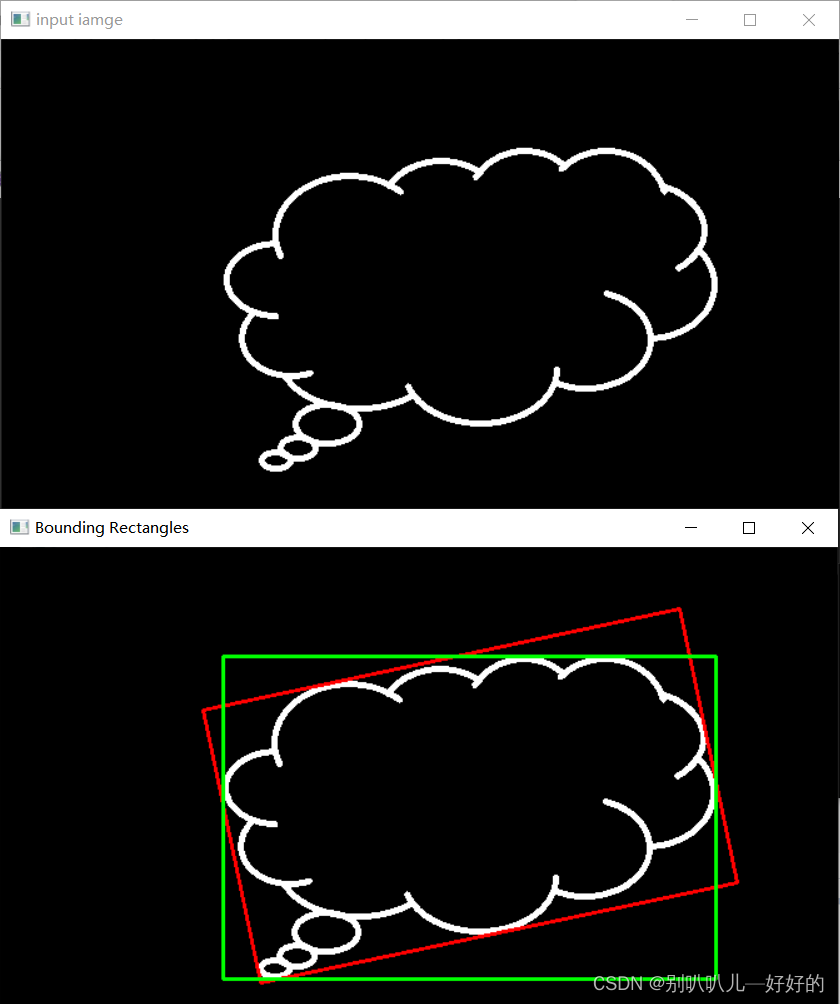
rectangle(result, boundingBox, Scalar(0, 255, 0), 2);
// 显示结果图像
imshow("Bounding Rectangles", result);
waitKey(0);
return 0;
}
以上代码首先加载一张图像,并将其转换为灰度图像。然后使用二值化操作对图像进行处理,以突出目标的轮廓。接下来使用findContours()函数找到图像中的轮廓。然后通过调用minAreaRect()函数计算轮廓的最小外接矩形,以及调用boundingRect()函数计算边界框。最后,绘制最小外接矩形和边界框,并显示结果图像。

















 4906
4906











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











