









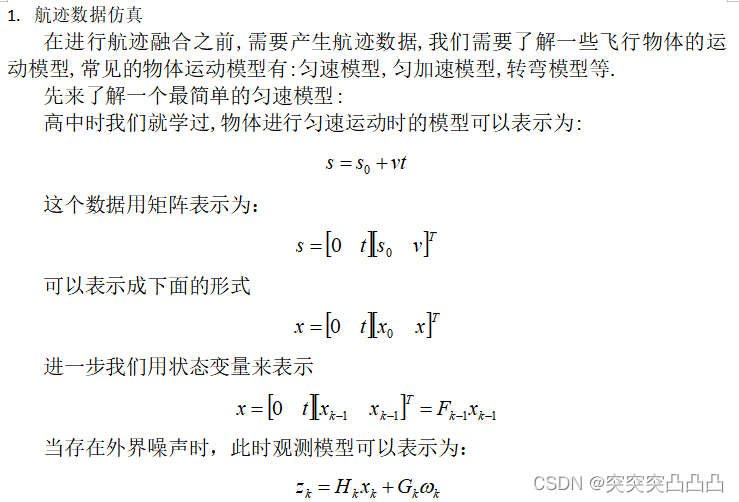
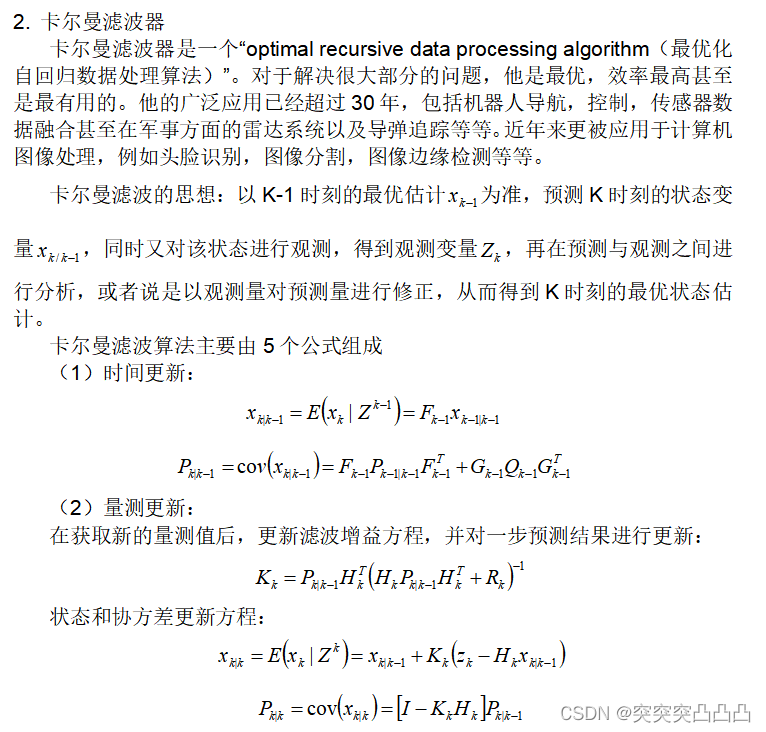
原理
航迹关联仿真
共产生了6条航迹,分别是直线航迹1、圆航迹、直线航迹2、直线航迹3、8字航迹、椭圆航迹。产生方法是首先根据各种航迹的运动方程产生直角坐标系下的轨迹,其中8字航迹和椭圆航迹分别调用了函数EightTrack和EllipseTrack来产生,然后利用坐标系转换,将直角坐标系的值转换为极坐标系的值,即距离、方位角、俯仰角,值得注意的是,转换过程中要考虑象限问题,当方位角处于二三象限时,方位角需加上一个,这样得到的是目标在极坐标系下的真实值,然后加上高斯白噪声,噪声的方差由自己设定,即观测噪声,这样就得到了目标在极坐标系下的观测值(距离、方位角、俯仰角)。对于虚假目标的产生,采用在距离、方位角、俯仰角三个方面分别产生随机噪声,而漏警的情况直接将该CPI的数据置空。
(1)原始数据

(2)航迹关联结果

















 4753
4753











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











