










DBF测角
根据波束形成方式进行测角,原理不再赘述
实验仿真
信号采用LFM连续波,阵列为8阵元线阵,设置两个目标分别为-10°,30°,距离100,速度为0
仿真结果
(1)距离-角度三维图

(2)距离-角度俯视图

干涉测角
干涉仪是对一类相位法测向设备的称呼,它是通过测量位于不同波前的天线接收信号的相位差,经过处理获取来波方向。由于它是通过比较两个天线之间的相位来获取方向,因此其测向方法也称为比想法。最简单的单基线相位干涉仪由两个信道组成。
若某个辐射源距离接收机足够远,可以将接收到的电磁波近似为平面波。来波方向与天线视轴夹角为
θ
\theta
θ,则平面波前到达天线1和天线2的时间就有先有后,体现在固定频率信号上就存在相位差。它到达两个天线的相位差为
ϕ
=
2
π
l
λ
s
i
n
θ
\phi=\frac{2\pi l}{\lambda}sin\theta
ϕ=λ2πlsinθ
式中,
λ
\lambda
λ为信号波长,
l
l
l为两天线间距。如果两个信道的相位响应完全一致,接收机输出信号的相位差仍然为
ϕ
\phi
ϕ,进行角度变换,求得辐射源信号的到达方向
θ
\theta
θ
θ
=
a
r
c
s
i
n
(
ϕ
λ
2
π
l
)
\theta=arcsin(\frac{\phi \lambda}{2\pi l})
θ=arcsin(2πlϕλ)
长短基线
对于单基线干涉仪而言,提高测向精度与扩大视角范围之间存在不可调和的矛盾。若采用多基线干涉仪,视角范围
θ
\theta
θ与测角精度之间的矛盾可以解决:由较短间距的干涉仪决定视角,由较长间距的干涉仪决定测角精度。
以三基线一维干涉仪为例,各天线通道接收的直达波信号相位差为
ϕ
i
j
=
ϕ
i
−
ϕ
j
=
2
π
λ
d
i
j
s
i
n
θ
\phi_{ij}=\phi_i-\phi_j=\frac{2\pi}{\lambda}d_{ij}sin\theta
ϕij=ϕi−ϕj=λ2πdijsinθ
其中,
θ
\theta
θ为来波方向,
d
i
j
d_{ij}
dij为基线长度
按照矩阵形式,可以得到
ϕ
=
δ
s
i
n
θ
\phi=\delta sin\theta
ϕ=δsinθ
因此,可得
θ
=
s
i
n
−
1
(
(
δ
T
δ
)
−
1
δ
T
ϕ
)
\theta=sin^{-1}((\delta^{T}\delta)^{-1}\delta^T\phi)
θ=sin−1((δTδ)−1δTϕ)
因此可以得到来波方向,但根据正弦三角函数性质,线阵干涉仪存在来波方向180度模糊现象
相位差解模糊
长短基线的相位差分别为
ϕ
i
j
=
ϕ
i
j
′
+
2
k
i
j
π
ϕ
k
l
=
ϕ
k
l
′
+
2
k
k
l
π
\phi_{ij}=\phi'_{ij}+2k_{ij}\pi \\ \phi_{kl}=\phi'_{kl}+2k_{kl}\pi
ϕij=ϕij′+2kijπϕkl=ϕkl′+2kklπ
其中,
ϕ
i
j
′
和
ϕ
k
l
′
\phi'_{ij} 和\phi'_{kl}
ϕij′和ϕkl′为相位差主值,
k
i
j
和
k
k
l
k_{ij}和k_{kl}
kij和kkl为模糊数
因此可以得到
−
∣
ϕ
i
j
∣
+
ϕ
i
j
′
2
π
<
n
i
j
<
−
∣
ϕ
i
j
∣
−
ϕ
i
j
′
2
π
−
∣
ϕ
k
l
∣
+
ϕ
k
l
′
2
π
<
n
k
l
<
−
∣
ϕ
k
l
∣
−
ϕ
k
l
′
2
π
-\frac{|\phi_{ij}|+\phi'_{ij}}{2\pi}<n_{ij}<-\frac{|\phi_{ij}|-\phi'_{ij}}{2\pi} \\ -\frac{|\phi_{kl}|+\phi'_{kl}}{2\pi}<n_{kl}<-\frac{|\phi_{kl}|-\phi'_{kl}}{2\pi}
−2π∣ϕij∣+ϕij′<nij<−2π∣ϕij∣−ϕij′−2π∣ϕkl∣+ϕkl′<nkl<−2π∣ϕkl∣−ϕkl′
据此,只要确定模糊数的上下限,再依次再范围内进行模糊数的搜索,就可以得到模糊数,进一步求得真实角度。
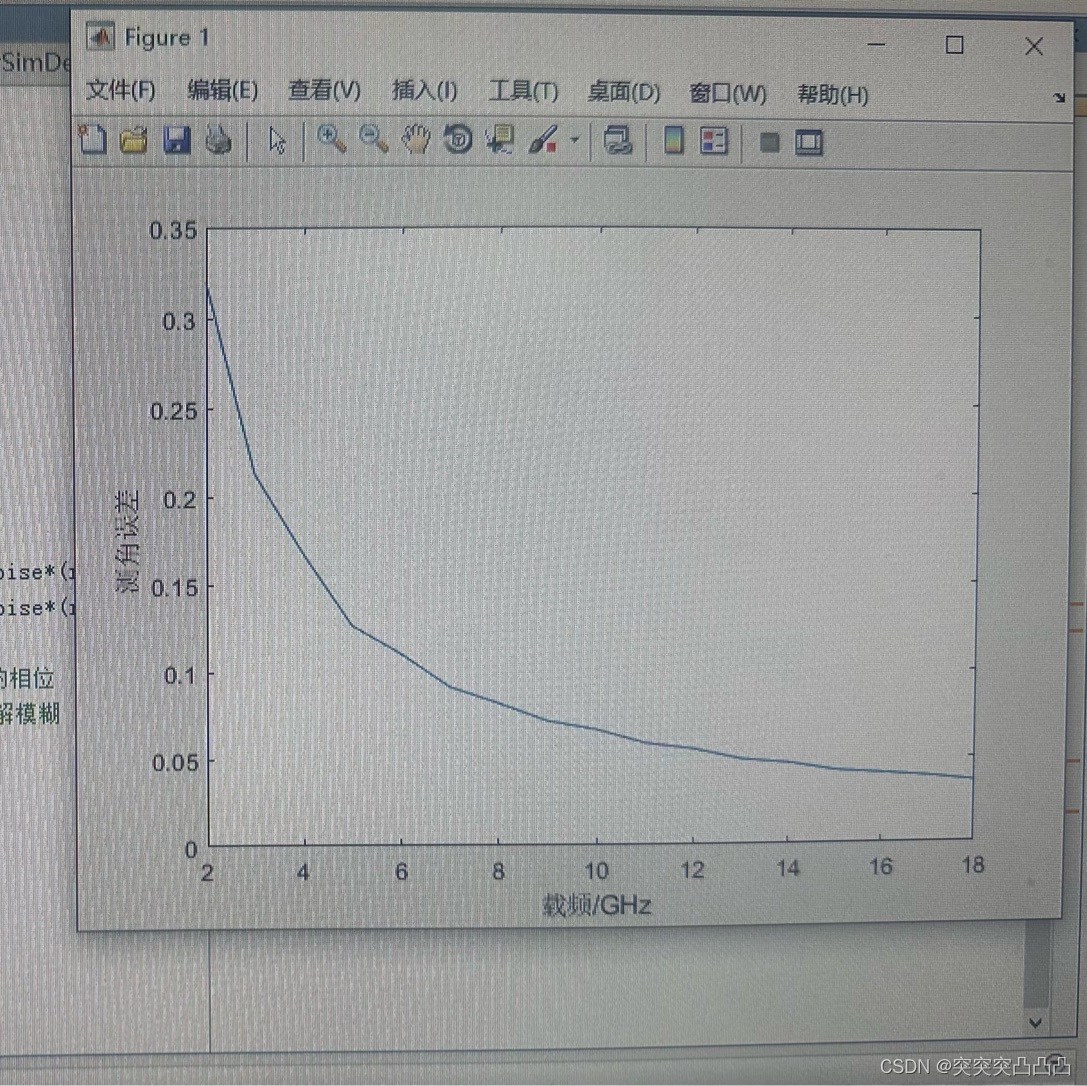
实验仿真
真实角度10度
载频范围2GHz-18GHz















 944
944











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











