






一般优化问题:无约束和有约束
无约束:



综上,无约束忧化直接分析法的局限:
局限一:导数有可能求不出来
局限二:即便求出导数,导数=0的解可能就不出来,比如导数本身就是高维函数
局限三:即便是解出来了,对于有些高度非线性矩阵,解也有可能是一个集合的形式,找一个最小值的解也不容易

主要就看搜索方向dk的选择:

上式先忽略二次项,只看前两项,第二项



但是这个算法通常比较慢,而且大概率求到的是局部最优解,尤其是函数极其复杂时,很难找到全局最优解。
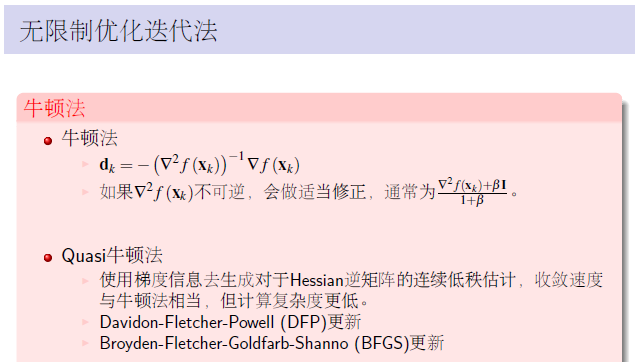
上述深度下降法胡洛了二次项,而牛顿法重新考虑的二次项,考虑的数量更多,情况更全面。
但牛顿法也不是万能的,好的时候特别好,坏的时候也不咋地,有可能越走越坏。如果海森矩阵不可逆,就要做一定的修正。
相比深度下降法的z字形路径,牛顿法有效的时候,在选好步长的前提下,一步就可以到位。
因为牛顿法的搜索方向的式子中,需要求海森矩阵的逆矩阵。首先海森矩阵不一定可逆,其次即便可逆,求起来也可能很复杂。所以有了下面的Quasi牛顿法,利用估计对牛顿法的改进。
有约束:
无约束的时候求最优解:一阶导数等于零,判断二阶倒数的正负。
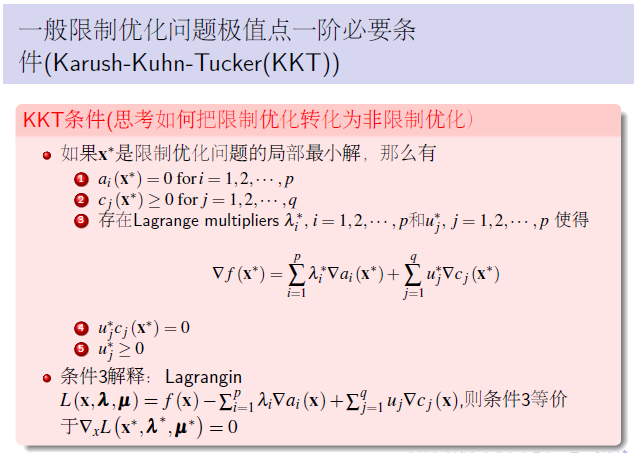
这么说KKT条件有一些抽象,下面简单说说他是如何推导出来的。
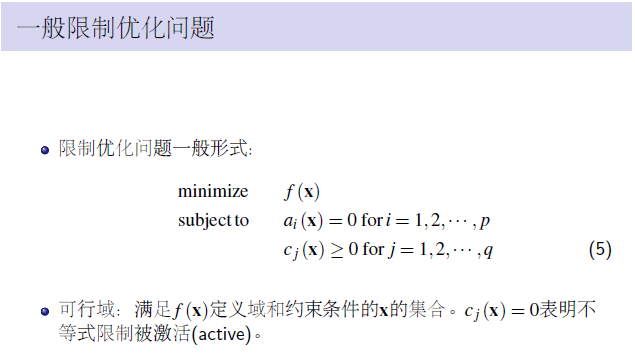
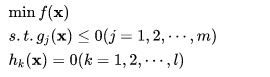
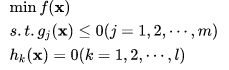
对于具有等式和不等式约束的一般优化问题:
KKT条件给出了判断
1、等式约束优化问题:
令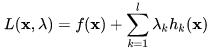


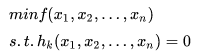
再联立方程组:
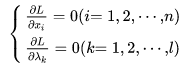
得到的解为可能极值点,由于我们用的是必要条件,具体是否为极值点需根据问题本身的具体情况检验。这个方程组称为等式约束的极值必要条件。
上式我们分别对n个



2、不等式约束优化问题:
主要思想:将不等式约束条件变成等式约束条件。
具体做法:引入松弛变量。松弛变量也是优化变量,也需要一视同仁求偏导。
具体而言,我们先看一个一元函数的例子:

在这种优化问题中,我们必须求得一个确定的值,因此不妨令所有的不等式均取到等号,即<=的情况。
这里引入了两个松弛变量


由此我们将不等式约束转化为了等式约束,并得到Lagrange函数:

我们再按照等式约束优化问题(极值必要条件)对其求解,联立方程
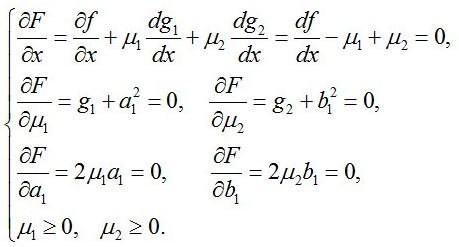
得出方程组后,便开始动手解它. 看到第3行的两式

对于
情形1:

因此g1与其相乘为零,可以理解为约束g1 不起作用,且有
情形2:

此时
合并情形1和情形2得:


同理可分析

由此,方程组(极值必要条件)转化为:
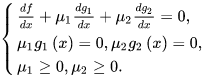
这是一元一次的情形.类似地,对于多元多次不等式约束问题,

我们有:
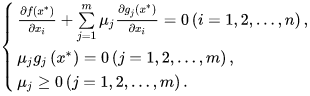
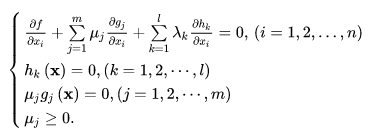
上式便称为不等式约束优化问题的KKT(Karush-Kuhn-Tucker)条件称
总和上述两种约束情况:
KKT条件(
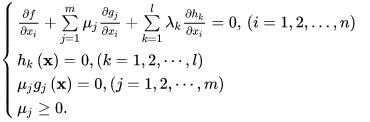
但是如果是凸优化,KKT条件就是该函数的充要条件。

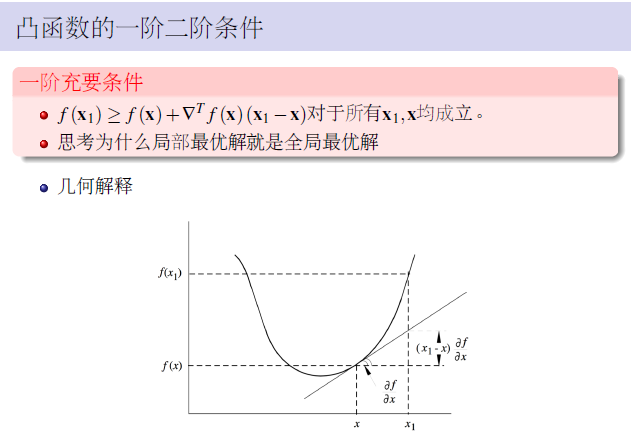
一阶充要条件不好用,因为我们要将所有的点都带进去试一试,但很好解释。
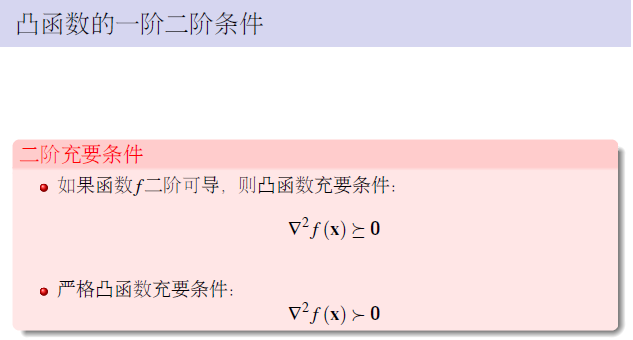
二阶充要条件比较好用。
凸函数有一点非常重要:凸函数的局部最优解就是全局最优解(用凸函数定义,使用反证法可证之)。















 989
989











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









