






- 打开“运动控制”向导,“工具”->“向导”->“运动控制”
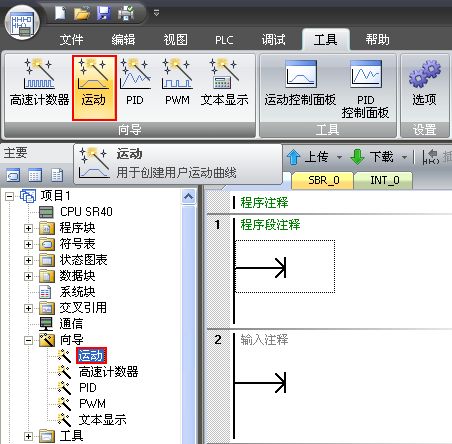
图 1.打开“运动控制”向导
- 选择需要配置的轴
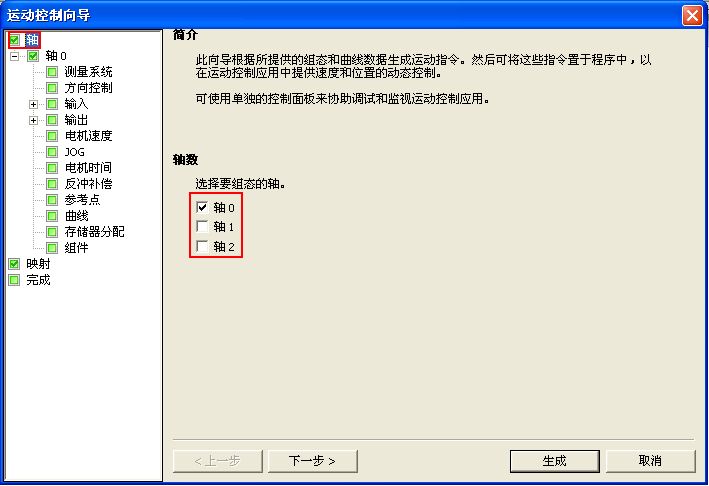
图 2.选择需要配置的轴
- 为所选择的轴命名

图 3.为所选择的轴命名
- 输入系统的测量系统(“工程量”或者“脉冲数/转”)
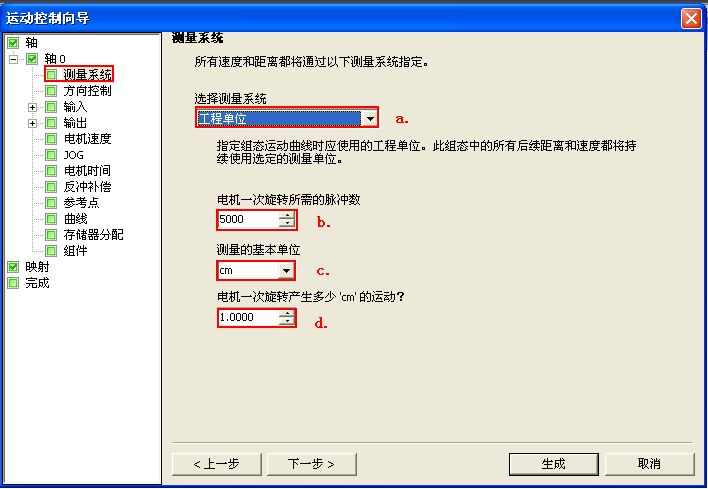
图 4.选择测量系统
a.选择工程单位或者是脉冲数;
b.选择电机每转脉冲数;
c.选择基本单位 ;
d.输入电机每转运行距离
- 设置脉冲方向输出
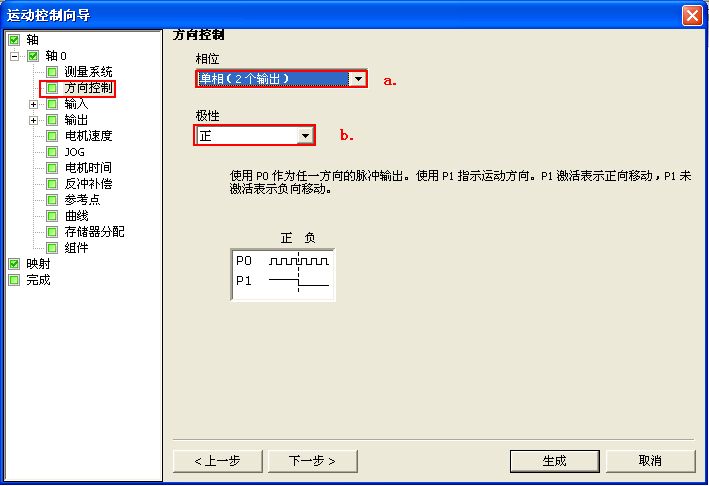
图 5.设置脉冲方向输出
a.设置有几路脉冲输出(单相:1路、双向:2路、正交:2路);
b.设置脉冲输出极性和控制方向。
- 分配输入点
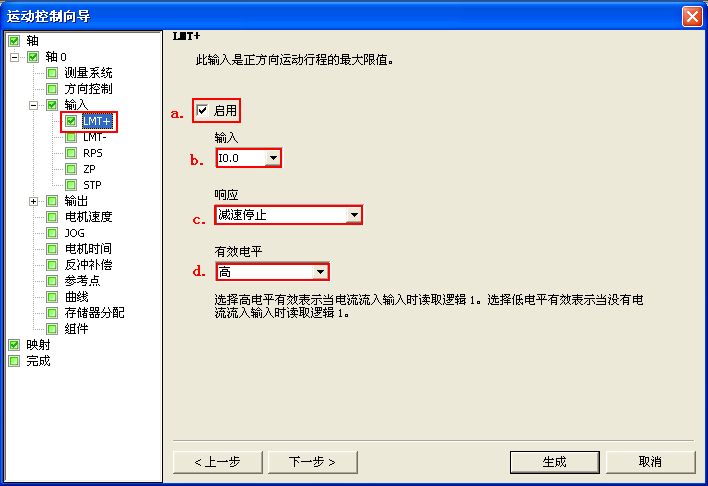
图 6.配置正限位输入点
a.正限位使能;
b.正限位输入点;
c.指定相应输入点有效时的响应方式;
d.指定输入信号有效电平(低电平有效或者高电平有效)。
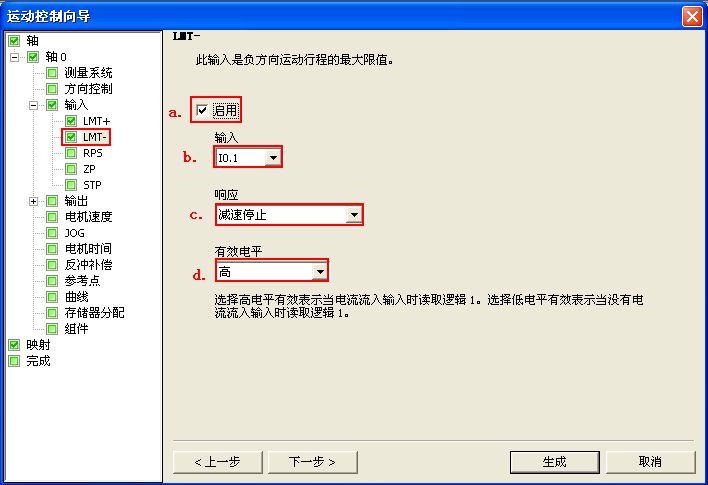
图 7.配置负限位输入点
a.负限位使能;
b.负限位输入点;
c.指定相应输入点有效时的响应方式;
d.指定输入信号有效电平(低电平有效或者高电平有效)。
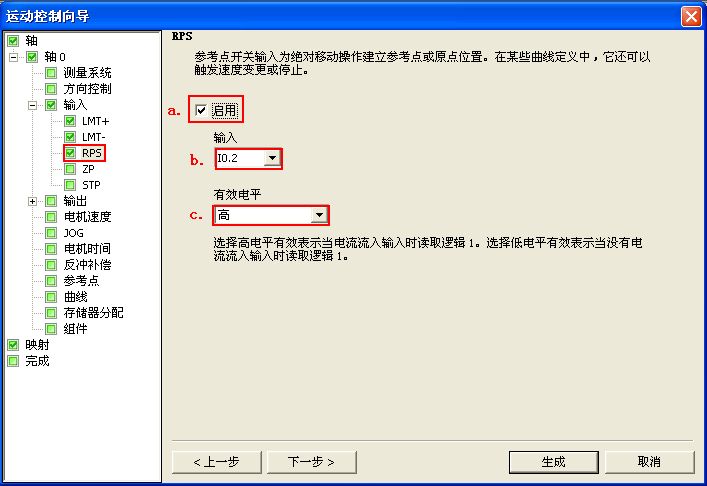
图 8.配置参考点
a.使能参考点;
b.参考点输入点;
c.指定输入信号有效电平(低电平有效或者高电平有效)。
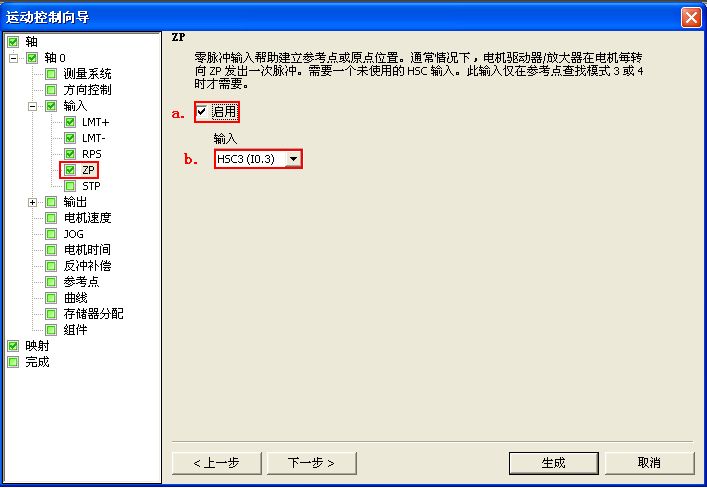
图 9.配置零脉冲
a.使能零脉冲:
b.零脉冲输入点。
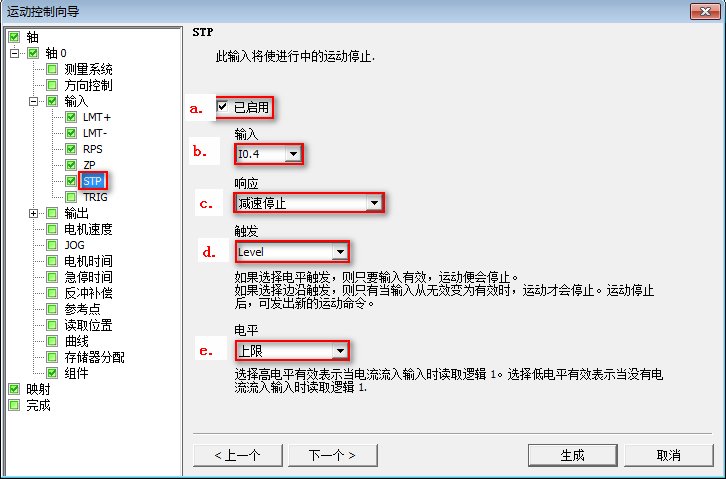
图 10.配置停止点
a.使能停止点;
b.停止输入点;
c.指定相应输入点有效时的响应方式;
d.指定输入信号的触发方式,可以选择电平触发或者边沿触发。
e.指定输入信号有效电平(低电平有效或者高电平有效)。
- 定义输出点
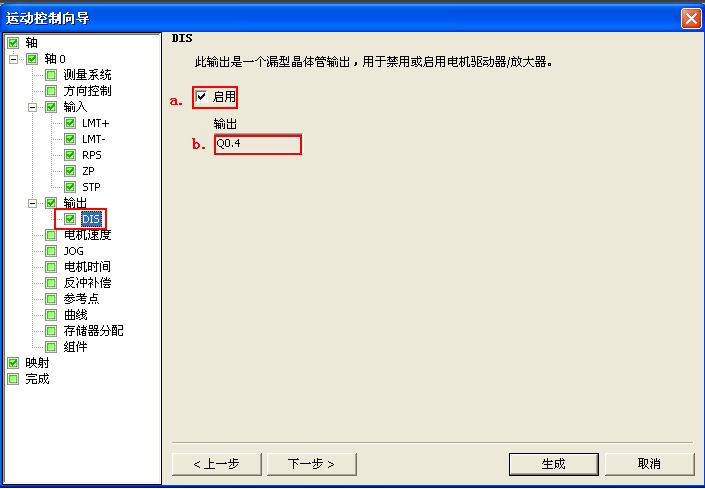
图 11.定义输出点
注意:每个轴的输出点都是固定的用户不能对其进行修改,但是可以选择使能/不使能 DIS。
- 定义电机的速度
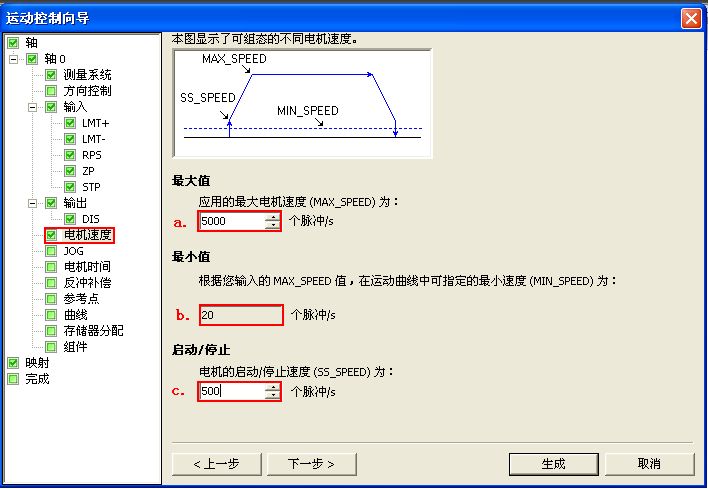
图 12.定义电机的速度
a.定义电机运动的最大速度“MAX_SPEED”;
b.根据定义的最大速度,在运动曲线中可以指定的最小速度;
c.定义电机运动的启动/停止速度“SS_SPEED” 。
- 定义点动参数
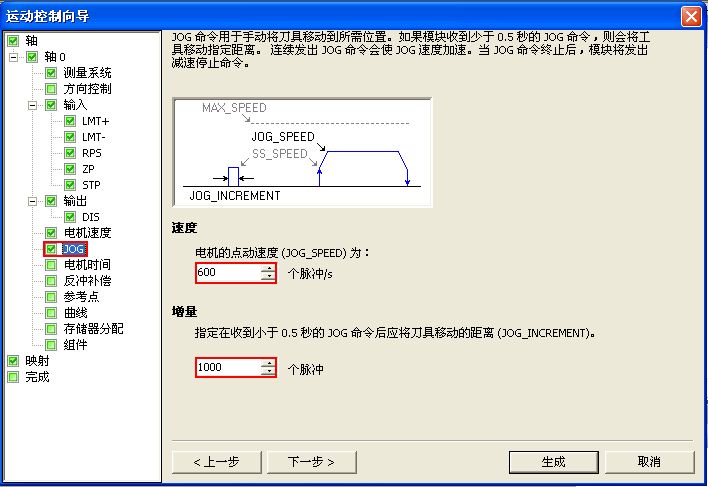
图 13.定义点动参数
a.定义点动速度“JOG_SPEED”(电机的点动速度是点动命令有效时能够得到的最大速度);
b.定义点动位移“JOG_INCREMENT”(点动位移是瞬间的点动命令能够将工件运动的距离)。
注意:当 CPU 收到一个点动命令后,它启动一个定时器。如果点动命令在0.5秒到时之前结束,CPU 则以定义的SS_SPEED速度将工件运动JOG_INCREMENT数值指定的距离。当0.5秒到时时,点动命令仍然是激活的,CPU 加速至JOG_SPEED速度。继续运动直至点动命令结束,随后减速停止。
- 加/减速时间设置
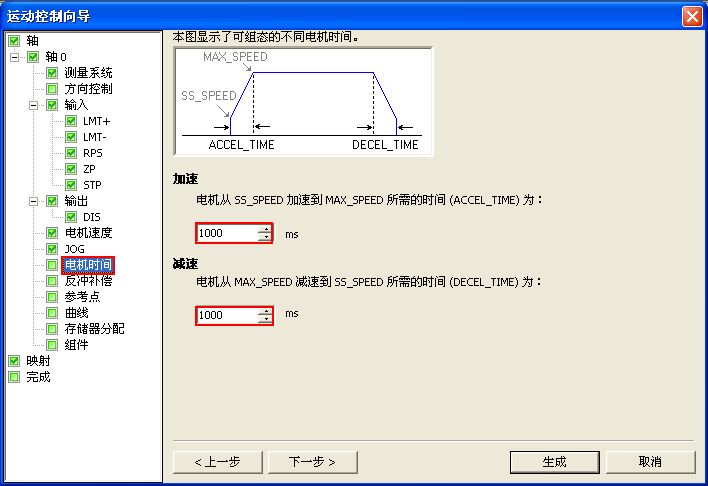
图 14.加/减速时间设置
a.设置从启动/停止速度“SS_SPEED”到最大速度“MAX_SPEED"的加速度时间“ACCEL_TIME”;
b.设置从最大速度“MAX_SPEED”到启动/停止速度“SS_SPEED”的减速度时间“DECEL_TIME ”。
- 定义反冲补偿
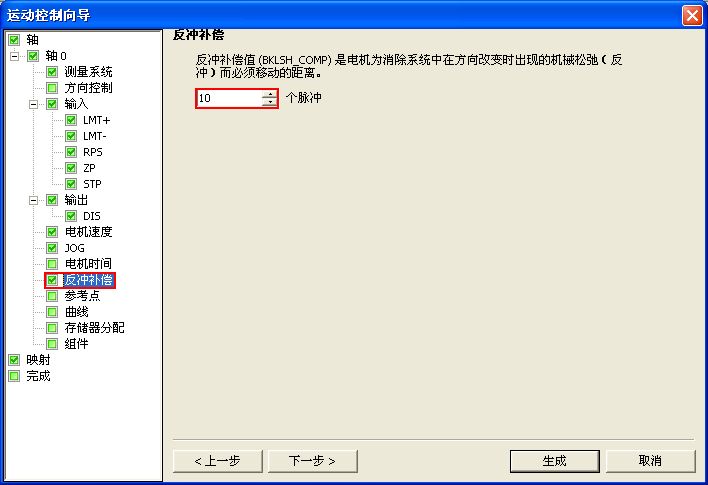
图 15.定义反冲补偿
注意:反冲补偿为当方向发生变化时,为消除系统中因机械磨损而产生的误差,电机必须运动的距离。反冲补偿总是正值。(缺省=0)
- 使能寻找参考点位置
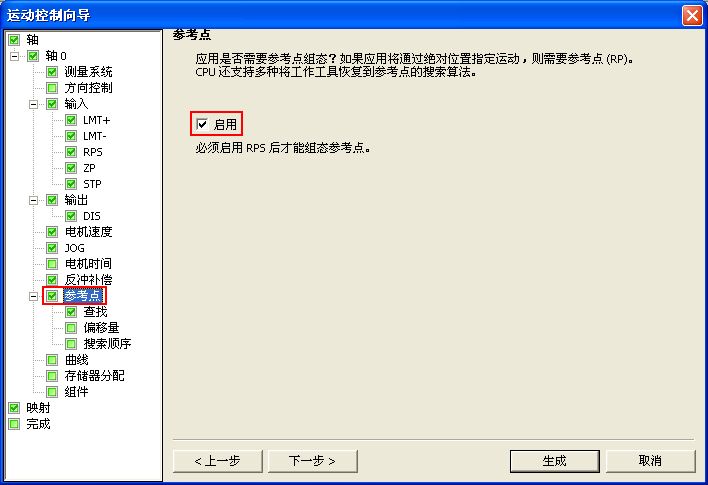
图 16. 使能寻找参考点位置
注意:若您的应用需要从一个绝对位置处开始运动或以绝对位置作为参考,您必须建立一个参考点(RP)或零点位置,该点将位置测量固定到物理系统的一个已知点上。 - 设置寻找参考点位置参数
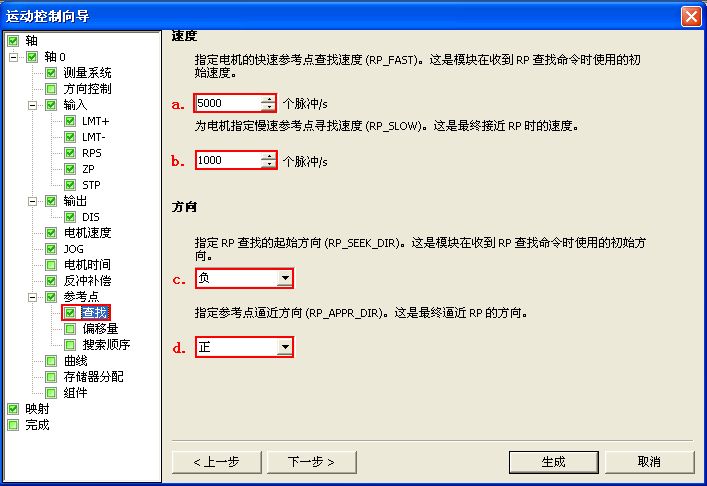
图 17.设置寻找参考点参
a.定义快速寻找速度“RP_FAST”(快速寻找速度是模块执行RP寻找命令的初始速度,通常RP_FAST是MAX_SPEED的2/3左右);
b.定义慢速寻找速度“RP_SLOW”(慢速寻找速度是接近RP的最终速度,通常使用一个较慢的速度去接近RP以免错过,RP_SLOW的典型值为SS_SPEED);
c.定义初始寻找方向“RP_SEEK_DIR”(初始寻找方向是RP寻找操作的初始方向。通常,这个方向是从工作区到RP附近。限位开关在确定RP的寻找区域时扮演重要角色。当执行RP寻找操作时,遇到限位开关会引起方向反转,使寻找能够继续下去,默认方向=反向);
d.定义最终参考点接近方向“RP_APPR_DIR”,(最终参考点接近方向是为了减小反冲和提供更高的精度,应该按照从RP移动到工作区所使用的方向来接近参考点,默认方向=正向)。
- 设置参考点偏移量
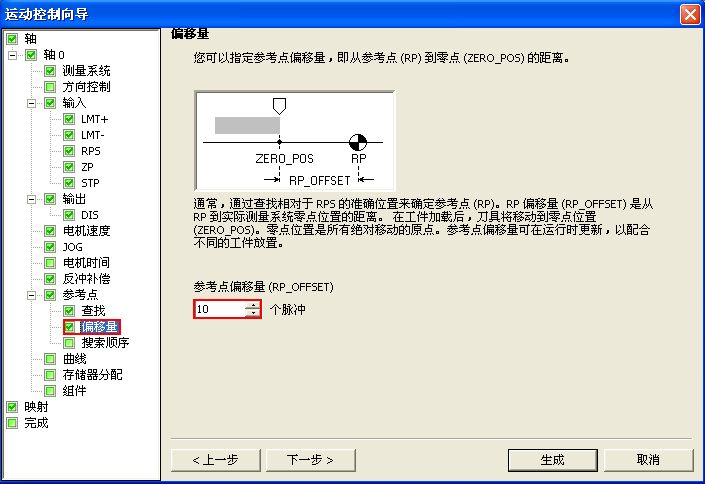
图 18.设置参考点偏移量
注意:参考点偏移量“RP_OFFSET是”在物理的测量系统中RP到零位置之间的距离,缺省=0。
- 设置寻找参考点顺序
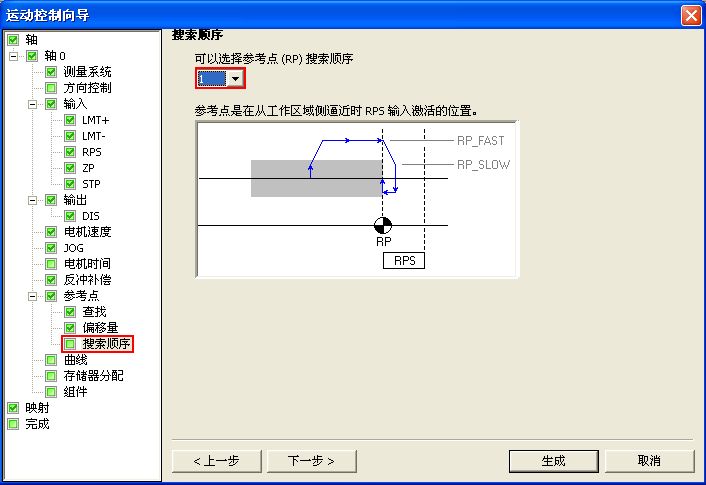
图 19.设置寻找参考点顺序
S7-200 SMART 提供4中寻找参考点顺序模式,每种模式定义如下:
RP寻找模式1:RP位于RPS输入有效区接近工作区的一边开始有效的位置上;
RP寻找模式2:RP位于RPS输入有效区的中央;
RP寻找模式3:RP位于RPS输入有效区之外,需要指定在RPS失效之后应接收多少个ZP(零脉冲)输入;
RP寻找模式4:RP通常位于RPS输入的有效区内,需要指定在RPS激活后应接收多少个ZP(零脉冲)输入。
- 新建运动曲线并命名
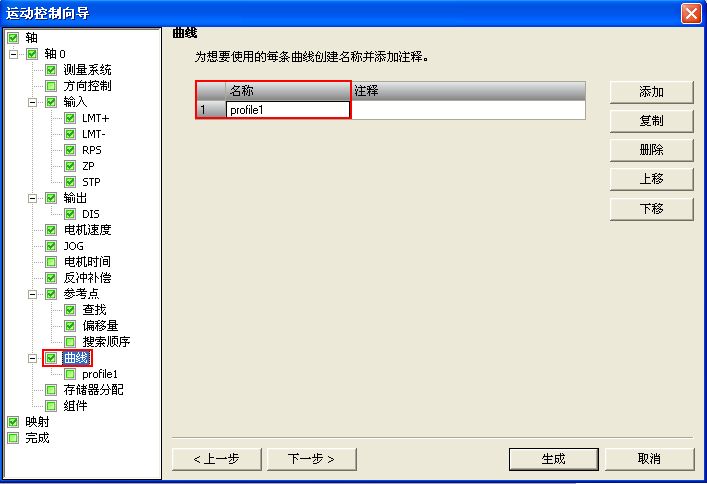
图 20.新建运动曲线并命名
通过点击“添加(Add)”按钮添加移动曲线并命名。
注意:S7-200 SMART 支持最多32组移动曲线。运动控制向导提供移动曲线定义,在这里,您可以为您的应用程序定义每一个移动曲线。运动控制向导中可以为每个移动曲线定义一个符号名,其做法是您在定义曲线时输入一个符号名即可。
- 定义运动曲线
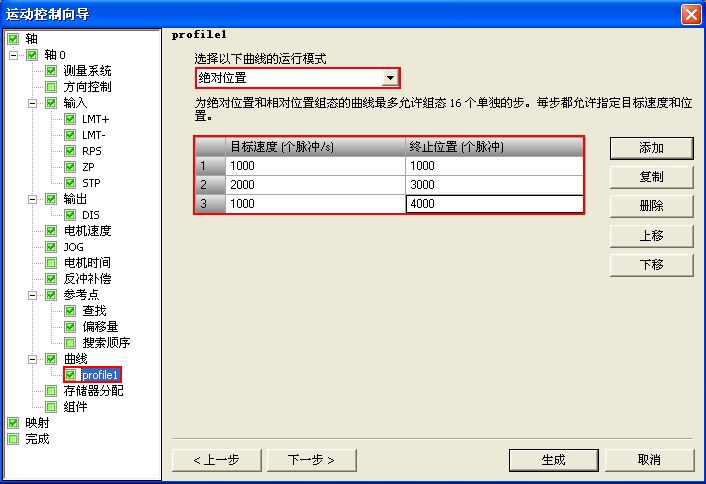
图 21.定义运动曲线
a.选择移动曲线的操作模式(支持四种操作模式:绝对位置、相对位置、单速连续旋转、两速连续转动);
b.定义该移动曲线每一段的速度和位置(S7-200 SMART 每组移动曲线支持最多16步)。
- 为配置分配存储区
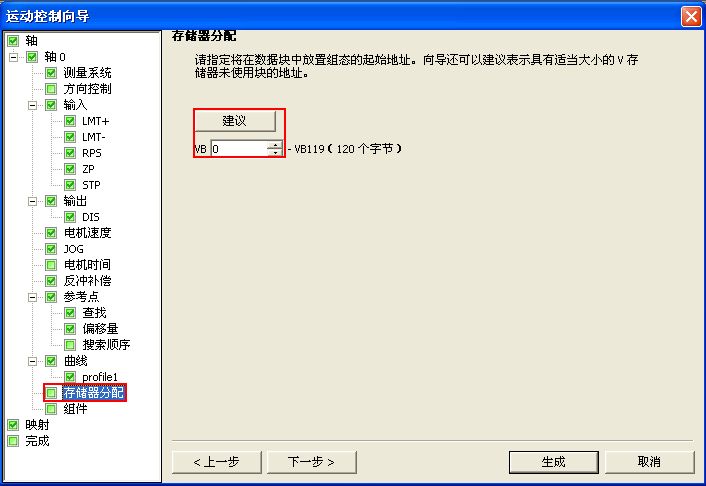
图 22.为配置分配存储区
通过点击“建议(Suggest)”按钮分配存储区
注意:程序中其他部分不能占用该向导分配的存储区。
- 完成组态
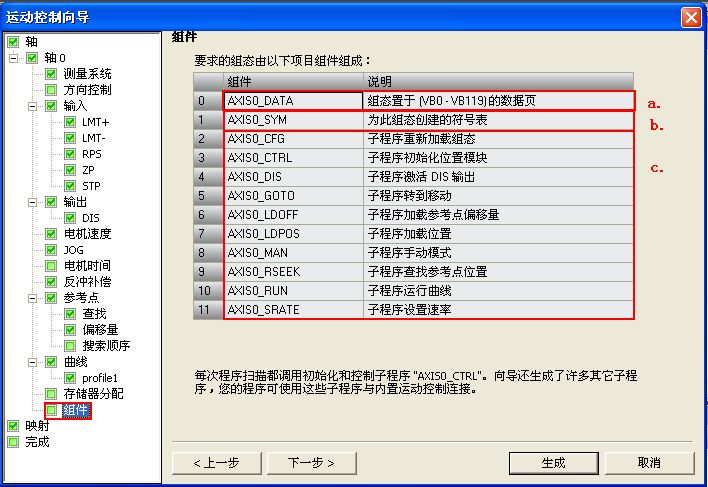
图 23.向导生成的组件
当您完成对运动控制向导的组态时,只需点击生成(Generate),然后运动控制向导会执行以下任务:
a. 将组态和曲线表插入到您的 S7-200 SMART CPU 的数据块(AXISx_DATA)中;
b. 为运动控制参数生成一个全局符号表(AXISx_SYM);
c. 在项目的程序块中增加运动控制指令子程序,您可在应用中使用这些指令;
要修改任何组态或曲线信息,您可以再次运行运动控制向导。
注意:由于运动控制向导修改了程序块、数据块和系统块,要确保这三种块都下载到 S7-200 SMART CPU 中。否则,CPU 可能会无法得到操作所需的所有程序组件。
- 查看输入输出点分配
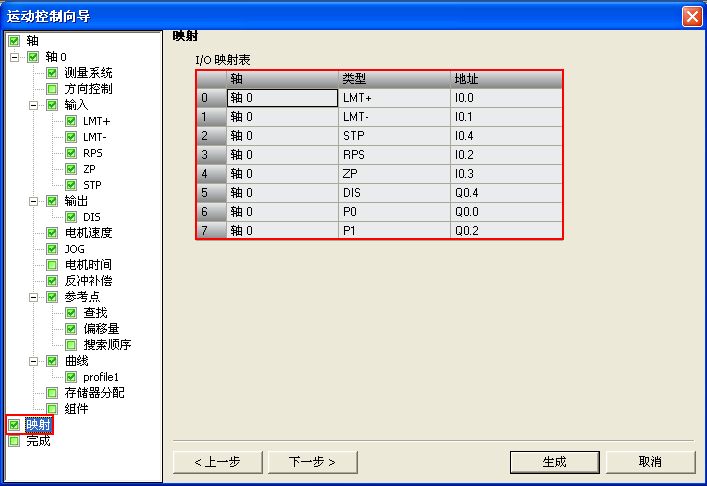
图 24.输入输出点分配
完成配置后运动控制向导会显示运动控制功能所占用的 CPU 本体输入输出点的情况。















05-19
 1709
1709
1709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









