







 本文介绍了如何使用卡尔曼滤波来估计匀加速运动小车的状态。通过分析位移和速度变化公式,揭示了在无法准确建模或存在误差的情况下,卡尔曼滤波作为反馈机制的重要性。文章还探讨了测量值与系统状态的关系,以及噪声在模型中的高斯分布假设,强调了卡尔曼滤波在处理噪声和不确定性中的作用。
本文介绍了如何使用卡尔曼滤波来估计匀加速运动小车的状态。通过分析位移和速度变化公式,揭示了在无法准确建模或存在误差的情况下,卡尔曼滤波作为反馈机制的重要性。文章还探讨了测量值与系统状态的关系,以及噪声在模型中的高斯分布假设,强调了卡尔曼滤波在处理噪声和不确定性中的作用。
本文主要内容借鉴http://blog.csdn.net/heyijia0327/article/details/17487467博客当中的内容。
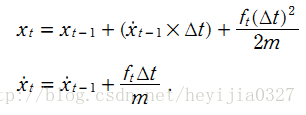
有一个匀加速运动的小车,它受到的合力为 ft , 由匀加速运动的位移和速度公式,能得到由 t-1 到 t 时刻的位移和速度变化公式:
该系统系统的状态向量包括位移和速度,分别用 xt 和 xt的导数 表示。控制输入变量为u,也就是加速度,于是有如下形式:


所以这个系统的状态的方程为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2234
2234

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









