







原文地址:http://blog.csdn.net/xukai871105/article/details/43456985
0.前言
在嵌入式操作系统中互斥型信号量是任务间资源保护的重要手段。下面结合一个具体例子说明FreeRTOS中的互斥型信号量如何使用。
互斥型信号量的使用方法如图1所示。在多数情况下,互斥型信号量和二值型信号非常相似,但是从功能上二值型信号量用于同步,而互斥型信号量用于资源保护。互斥型信号量和二值型信号量还有一个最大的区别,互斥型信号量可以有效解决优先级反转现象。
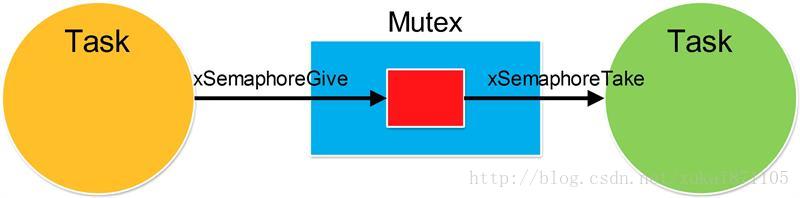
图1 互斥型信号量使用方法
(1)互斥信号量的简介
在互斥访问中互斥信号量相当于一个钥匙,当任务想要使用资源的时候就必须先获得这个钥匙,当使用完资源以后就必须归还这个钥匙,这样其他的任务就可以拿着这个钥匙去使用资源.
(2)优先级继承
当一个互斥信号量正在被一个低优先级的任务使用,而此时有个高优先级的任务也尝试获取这个这个互斥信号量的话就会被阻塞。不过这个高优先级的任务会将低优先级的任务的优先级提升到与自己相同优先级,这个过程就是优先级继承。
优先级继承尽可能降低了高优先级任务处于阻塞态的时间,并将已经出现的“优先级翻转的影响降低到最低.
(3)互斥信号量不能用在中断服务函数中,原因如下:
互斥信号量具有优先级继承机制,所以只能用在任务中,不能用在中断服务函数中。
中断服务函数中不能因为要等待互斥信号量而设置阻塞时间进入阻塞态。
(4)二值信号量 与 互斥信号量的区别
互斥信号量拥有优先级继承机制,二值信号量没有优先级继承机制
二值信号量更加适合用于任务同步,互斥信号量更加适合用于互斥访问
2.参考代码
本例具有两个任务,两个任务都试图通过串口打印内容,此时串口就好比一个“资源”,某个任务使用串口资源时必须保护该资源,使用完串口之后在释放资源。保护和释放动作便对应互斥型信号量的两个基本操作,xSemaphoreTake和xSemaphoreGive。
【代码】
/* Standard includes. */
#include <stdio.h>
#include <string.h>
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* Library includes. */
#include "stm32f10x.h"
#define LED0_ON() GPIO_SetBits(GPIOB,GPIO_Pin_5);
#define LED0_OFF() GPIO_ResetBits(GPIOB,GPIO_Pin_5);
static void Setup(void);
void TaskA( void *pvParameters );
void TaskB( void *pvParameters );
void LedInit(void);
void UART1Init(void);
/* 互斥信号量句柄 */
SemaphoreHandle_t xSemaphore = NULL;
int main(void)
{
/* 初始化硬件平台 */
Setup();
/* 创建互斥信号量 */
xSemaphore = xSemaphoreCreateMutex();
/* 建立任务 */
xTaskCreate( TaskA, "TaskA", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY+3, NULL );
xTaskCreate( TaskB, "TaskB", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY+4, NULL );
/* 启动OS */
vTaskStartScheduler();
return 0;
}
void TaskA( void *pvParameters )
{
for( ;; )
{
xSemaphoreTake( xSemaphore, portMAX_DELAY );
{
printf("Task A\r\n");
}
xSemaphoreGive( xSemaphore );
vTaskDelay( 2000/portTICK_RATE_MS );
}
}
void TaskB( void *pvParameters )
{
for( ;; )
{
xSemaphoreTake( xSemaphore, portMAX_DELAY );
{
printf("Task B\r\n");
}
xSemaphoreGive( xSemaphore );
vTaskDelay( 1000/portTICK_RATE_MS );
}
}
static void Setup( void )
{
LedInit();
UART1Init();
}
void LedInit( void )
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
/*LED0 @ GPIOB.5*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init( GPIOB, &GPIO_InitStructure );
}
void UART1Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 第1步:打开GPIO和USART时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
/* 第2步:将USART1 Tx@PA9的GPIO配置为推挽复用模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 第3步:将USART1 Rx@PA10的GPIO配置为浮空输入模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 第4步:配置USART1参数
波特率 = 9600
数据长度 = 8
停止位 = 1
校验位 = No
禁止硬件流控(即禁止RTS和CTS)
使能接收和发送
*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* 第5步:使能 USART1, 配置完毕 */
USART_Cmd(USART1, ENABLE);
/* 清除发送完成标志 */
USART_ClearFlag(USART1, USART_FLAG_TC);
/* 使能USART1发送中断和接收中断,并设置优先级 */
NVIC_InitTypeDef NVIC_InitStructure;
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/* 设定USART1 中断优先级 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = configLIBRARY_KERNEL_INTERRUPT_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* 使能接收中断 */
// USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
int fputc(int ch, FILE *f)
{
/* 写一个字节到USART1 */
USART_SendData(USART1, (uint8_t) ch);
/* 等待发送结束 */
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET)
{}
return ch;
}3.简单说明
SemaphoreHandle_t xSemaphore = NULL;
申明互斥型信号量,在FreeRTOS中二值型信号量和互斥型信号量类型完全相同。
xSemaphore = xSemaphoreCreateMutex();
创建互斥型信号量。
xSemaphoreTake( xSemaphore, portMAX_DELAY );
获得资源的使用权,此处的等待时间为
portMAX_DELAY(挂起最大时间),如果任务无法获得资源的使用权,任务会处于挂起状态。
xSemaphoreGive( xSemaphore );
释放资源的使用权。
互斥型信号量和二值型信号量使用方法相似,但二值型信号量用于同步而互斥型信号量用于资源保护。















 699
699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









