









 本文围绕航测展开,介绍了数码相机焦距、传感器等知识,包括实际焦距、等效焦距的区别及计算。探讨了固定翼与旋翼机区别、无人机航拍航线设计。阐述了航测对相机的要求,分析相机对测绘精度的影响,还说明了GSD、比例尺、精度、图像精细度与飞行高度的关系。
本文围绕航测展开,介绍了数码相机焦距、传感器等知识,包括实际焦距、等效焦距的区别及计算。探讨了固定翼与旋翼机区别、无人机航拍航线设计。阐述了航测对相机的要求,分析相机对测绘精度的影响,还说明了GSD、比例尺、精度、图像精细度与飞行高度的关系。
1、认识焦距
镜头焦距变化范围十分重要。在购买相机时,对相机是否具有广角镜头,光学变焦有多少倍,一般都很关注。焦距是指焦平面(胶片或感光元件)到镜头内对焦点之间的距离。焦距短,视角就大,照片画面上能够呈现的空间也就大,能拍摄到更多景物,适合大范围的主题,例如风景照片、团体大合照等;而焦距长(例如新闻记者手中的“大炮”),照片画面上所呈现的物体也就大,就像望远镜一样,能够拍摄到较远的物体。

镜头焦距变化范围在相机镜头上有明确的标注。例如,上图是佳能伊克萨斯115的镜头照片。镜头左边英文标出这是佳能4倍变焦镜头,镜头右边有一排数字为:5.0-20.0mm,表示镜头的焦距可从5.0mm变化至20.0mm。这是镜头的实际焦距(也称物理焦距)。另一方面,相机广告(或销售说明)以及包装盒上面,可以看到这款相机的“等效35mm焦距”(或35mm等值焦距)为:28-112mm。这组参数是大家更为关心。大家都知道,广角镜头的焦距小于28mm,300 mm则是长焦的“大炮”。这里的28mm、300mm指的便是“等效35mm焦距”,不是镜头的实际焦距。这个数字不出现在相机镜头上。什么是“等效35mm焦距”呢?
相机拍摄时视角的大小不仅与焦距有关,而且还与相机感光元件(CCD或CMOS)的尺寸有关,这个道理可以通过下图说明。
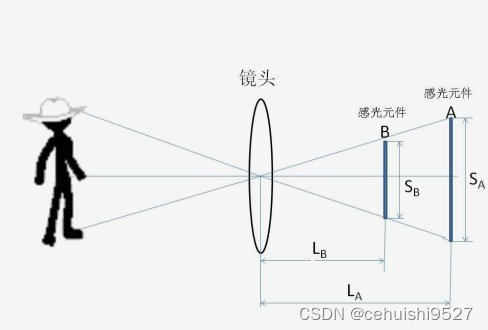
图中,A和B代表两个不同尺寸的感光元件,它们具有相同的视角,但是焦距不同。假定LA和LB分别是感光元件A和B的焦距,LA和LB之间存在一定关系。感光元件几何形状通常是矩形,一般用它们的对角线长度作为特征长度,假定分别为SA和SB。从图中相似三角形比例关系,可以得到:LA=(SA/SB)LB
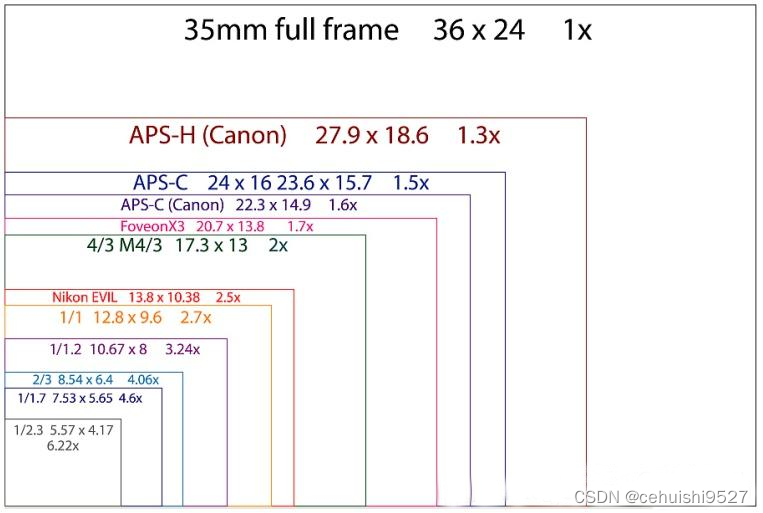
不同品牌、型号数码相机的感光元件尺寸往往各不相同。考虑到感光元件尺寸影响,要对相机镜头焦距有一个统一的标注,需要有一个参照标准,这样不同相机之间才有可比性。目前广泛采用35mm相机作为参照。35mm相机过去是用的最多的,它使用135胶卷,尺寸为36 x 24mm。现在小数码相机感光元件要比它小很多。
假定上图中感光元件A的尺寸为36 x 24mm(35mm相机),B是某种数码相机的感光元件,LB是其实际焦距,LA就是它的“等效35mm焦距”。因此,
“等效35mm焦距”=数码相机镜头的物理焦距× (SA/SB)
我们称(SA/SB) 为焦距系数或者焦距倍数。
下面简要介绍各类数码相机感光元件尺寸,以及焦距系数。
单反相机感光元件尺寸标注比较清楚,表示为长度x宽度。感光元件尺寸和35mm胶卷相同的称为全画幅,例如佳能5D Mark II,尼康D700,D800等等。它们的焦距系数是1,即物理焦距和35mm焦距相同。入门级单反感光元件一般采用APS-C画幅,它是全画幅上下左右各裁去一个块,因此比全画幅小。佳能550D、600D为22.3x14.9mm,尼康D5100、D7000为23.6x15.6mm。
单电(微单)相机感光元件的标注与单反相机一样。
小数码相机感光元件要比单反、单电相机小很多,标注也比较绕弯,表示为“1/xx”英寸。现在常用的有:1/2.3英寸,1/2.0英寸,1/1.7英寸等。显然,分母的数字越大,元件尺寸越小。这是一个名义尺寸,是“能够包容整个感光器件(包括了有效像素、无效像素、附加固定定位件边框等等)的外接圆的直径”。因为感光元件为矩形,因此就是该矩形对角线长度。从这个数字本身计算得到的数值比实际尺寸要大,因为它还包括了元件边框等,不同相机元件边框宽窄也可能不同。下表为网上查到的感光元件数据,以及由此计算得到的焦距系数供参考(不同相机数据可能有些差别)。
| 格式 | 长度(mm) | 宽度(mm) | 对角线 | 焦距系数 |
| 全画幅 | 36 | 24 | 43.27 | 1 |
| 佳能APS-H | 27.9 | 18.6 | 33.53 | 1.3 |
| 尼康APS-C | 23.6 | 15.8 | 28.40 | 1.5 |
| 佳能APS-C | 22.3 | 14.9 | 26.82 | 1.6 |
| 佳能1.5英寸*1 | 18.7 | 14 | 23.36 | 1.85 |
| 4/3系统*2 | 17.3 | 13.0 | 21.64 | 2.0 |
| 尼康 1系列*3 | 13.2 | 8.8 | 15.86 | 2.73 |
| 1/1.7英寸 | 7.76 | 5.82 | 9.70 | 4.46 |
| 1/1.8英寸 | 7.2 | 5.3 | 8.94 | 4.84 |
| 1/2.0英寸 | 6.4 | 4.8 | 8.0 | 5.41 |
| 1/2.3英寸 | 6.16 | 4.62 | 7.70 | 5.62 |
| 1/2.5英寸 | 5.76 | 4.29 | 7.18 | 6.02 |
| 1/2.7英寸 | 5.3 | 4.0 | 6.64 | 6.52 |
*1---佳能最新的G1X相机采用这种格式的CMOS
*2---奥林巴斯、松下等单电相机采用这种格式的感光元件
*3---尼康最近推出的单电J1、V1采用这种格式的感光元件
补充举例:
等效焦距(28 - 140mm)是什么意思?
因为相机的焦距是根据以前的135相机的焦距换算的。135相机的感光底片大小和现在的相机是不同的,为了方便比较,人们通常根据感光元件的尺寸将相机镜头的焦距换算成135相机的焦距。这种相机是最先普及开的,所以以它为标准。
“等效焦距(相当于35mm照相机)28 - 140mm”的意思就是:相机的镜头焦距按照35mm相机焦距换算,最小焦距为28mm,最大焦距为140mm。通俗的说就是这个相机镜头既有一定广角性能又具有一定远摄能力的5倍变焦镜头。
2、传感器
我发现,很多网友并不知道图像传感器尺寸中的“多少英寸”到底指什么?
首先,虽然大家都知道1英寸=25.4mm,但1英寸图像传感器的对角线尺寸其实只有约16mm,就连APS-C画幅单反/微单的图像传感器,对角线也只比25.4mm大一点。所以图像传感器的“多少英寸”应该不是对角线尺寸。
那么,“多少英寸”是图像传感器外接圆周长的一半么?我不知道为什么会有这种说法,但以1英寸图像传感器为例,外接圆周长 = 2×25.4 = 图像传感器对角线d × π,d = 16.17,看起来确实和实际情况接近。
然而,这并不能解释为什么较小尺寸图像传感器上,对角线尺寸会明显大于“外接圆周长的一半”。比如1/2.3英寸图像传感器,实际对角线尺寸是7.81mm,而根据“外接圆周长一半”计算的尺寸是约7mm。

所以,这个“多少英寸”到底指什么呢?答案其实还是“对角线”的长度,只不过这个对角线指的是与图像传感器有效面积相当的真空摄像管的直径。在以CCD/CMOS为代表的图像传感器普及之前,电视摄像机采用摄像真空管来进行记录。这个真空管有一个长玻璃外壳,实际成像圈远小于这个玻璃外壳的投影面积。

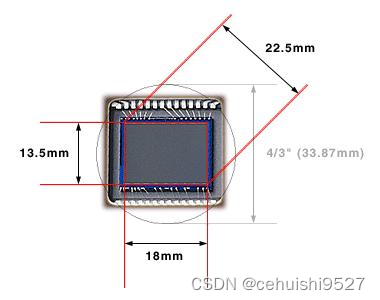
还没听明白的话可以暂停看看这张图,你就知道1英寸到底是哪个部分的长度了。
有时候就是这么奇怪,明明摄像真空管已经淡出大众视野,但它依然影响着如今最先进产品的技术规格,也让我们无法简单获知图像传感器的实际大小。“沿袭传统”的力量真的太强大了,哪怕它早就应该被重新标定,但就是一直延续至今。
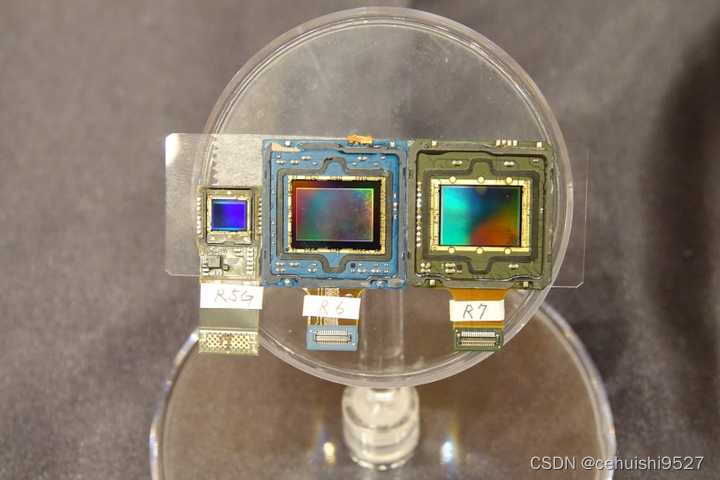
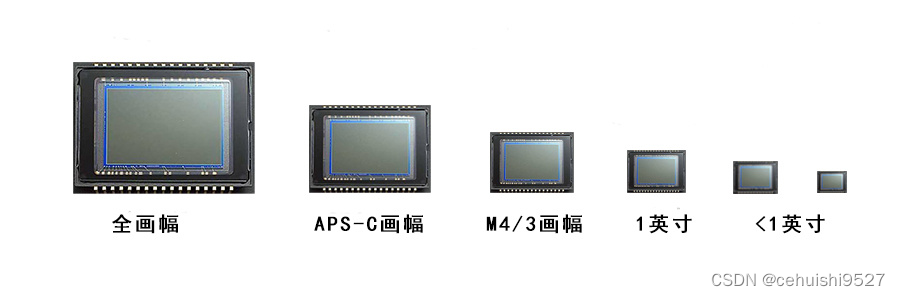
并不是所有的CMOS芯片都是按照 1英寸=16mm 来计算长度的,这要看CMOS对角线长度来定:只有CMOS对角线长度≥8mm时,才会使用16mm规范,此时1英寸=16mm。比如1/2 的芯片,对应对角线真实尺寸大约是8mm。对于对角线长度小于8mm的CMOS,使用18mm规范,此时1英寸=18mm,比如1/2.55英寸的芯片,其对角线的真实尺寸大约是7mm。
图为不同画幅的CMOS(或者CCD)的真实尺寸对比。一般来说,如果CMOS尺寸大于2英寸,就不再使用英寸来划分,而是给它取一个特定的名称,比如APS画幅,全画幅,中画幅,大画幅等等。
3、等效焦距
很多新手朋友分不清楚“实际焦距和等效焦距”它们到底有什么区别,以及等效焦距到底是什么?今天给大家讲讲等效焦距方面的基础知识,希望对大家有所帮助。
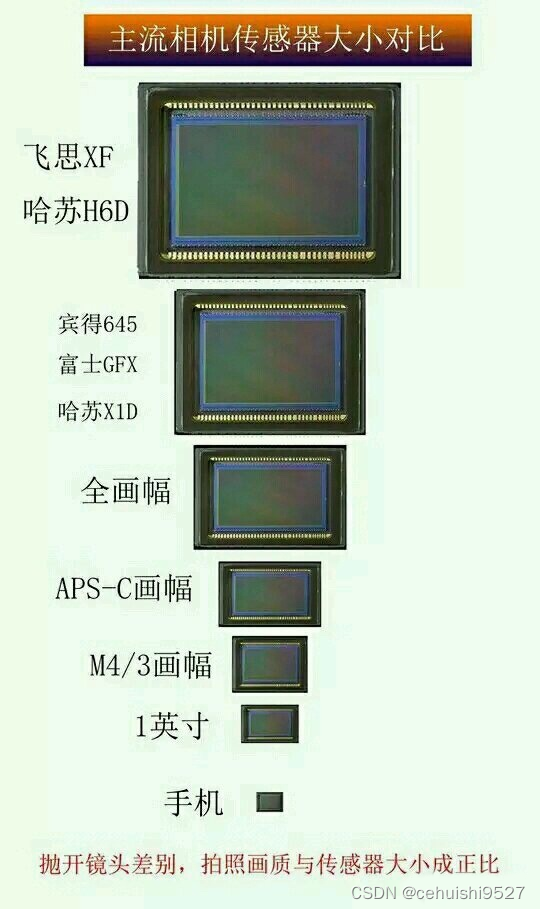
进入数码时代以来,数码相机拥有了各种尺寸的传感器,就拿能更换镜头的数码相机来说就有:全画幅、APS-C画幅、M4/3画幅、1英寸,等等。
相机传感器尺寸的不同会带来另一个东西:等效焦距。
感光元件对比
那么,有人可能就会问了,为什么我手里的18-55镜头实际上却拍不出18mm广角端的效果呢?原因很简单,你手中的相机感光元件尺寸不是基准,谁是基准?答案是36×24mm全画幅感光元件。
有时候约定俗成是一件很奇怪的东西,就像为什么说以35mm胶片相机的感光元件尺寸作为数码时代全画幅的基准一样,谁也说不清楚,人们就很自觉地将它当成公理不需要证明了。由于成本等因素考虑,大部分摄影器材的感光元件尺寸都要小于36×24mm(大中画幅这里不考虑)。因此为了统一对焦距的定义,人们就想出了“等效焦距”这一名词来给那些小感光元件的相机进行换算。
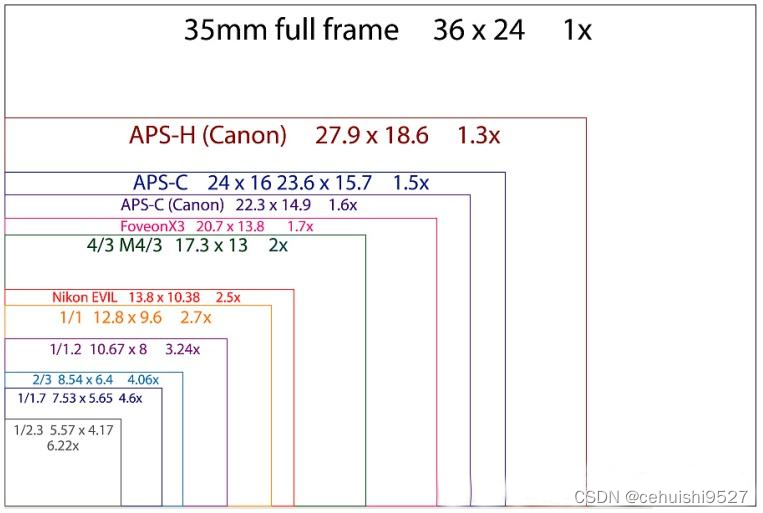
传感器尺寸对照表
如果你手中拥有的是全画幅相机,那么恭喜你,等效焦距这个词汇与你无关了,因为你就是“基准”;那么对于众多买不起全画幅相机的人们而言,不管你使用的是什么设备,相机也好,手机也好,等效焦距就都适用了。
不懂转换系数?
那么如何来衡量等效焦距呢?这里我们再引入一个概念“转换系数”,等式为:物理焦距×转换系数=等效焦距。转换系数的计算方法很简单,用全画幅感光元件的对角线长度÷你手中设备的感光元件对角线长度,这个比值就是转换系数。
常见的镜头转换系数
全画幅尺寸传感器:1.0
APS-C尺寸传感器:1.5 (尼康、索尼、宾得、富士),或者1.6(佳能)
M4/3尺寸传感器:2.0
1英寸传感器:2.7
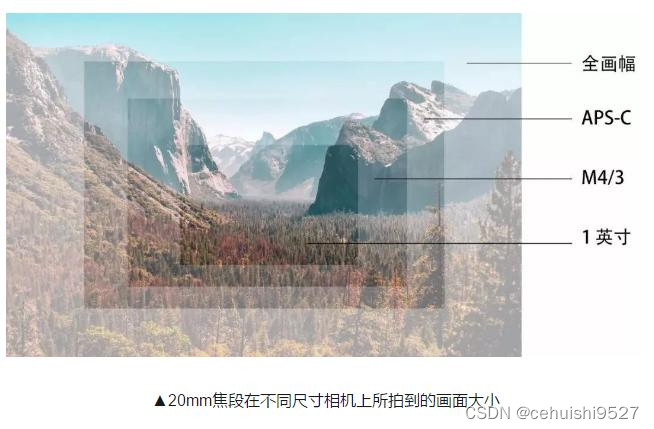
等效焦距
不同焦距的镜头,搭配不同尺寸的CCD/CMOS传感器,取景范围会有变化,相当于有了不同的焦距。如下图:焦距为20mm的镜头搭配全画幅传感器焦距仍为20mm,搭配越小的传感器,取景视场角越小,等效于在全画幅传感器上用焦距越大的镜头。
4、固定翼与旋翼机的区别
固定翼飞行速度快给人的误区就是其精度不如旋翼机,但是咨询过专家后,说是一样的,因为固定翼飞行速度快引起的像点位移都是计算好的,不存在飞行速度快精度就差的说法
5、无人机航拍航线设计探讨
1、飞机飞行速度25m/s,那么速度就是90km/h,以此来判断其他的无人机飞行效率
2、一定要杜绝一个误区,飞机飞得越高效率越高,飞行高度高带来的是照片分辨率的下降,所以单位照片实际覆盖的范围就会增加,不是说效率增加了,而是牺牲了分辨率增加了面积而已,如果分辨率作为评价质量的主要因素,那么这种增加效率的方法就行不通。
3、过去用航摄比例尺来计算航摄参数,现在用地面分辨率来计算航摄参数,道理是一样的,因为航摄比例尺=像元大小/GSD地面采样间隔=f焦距/H航高。
4、可以正确的计算拍照间隔即基线长度,可以正确的计算出拍照数量,飞机的飞行速度25m/s,那么2s定时拍摄的距离也就是50m,所以设置拍照间隔的时候小于50米的就很容易丢片子,因为空中的环境很复杂,顺风飞行的时候就会突破相机1.8秒拍照存储的极限,导致到了设定好的拍照位置但是相机没有反应过来,结果就是该拍的没有拍
5、根据传感器的像元物理尺寸准确地判断数据的采集能力,因为传感器的物理尺寸和焦距大小直接影响了地面采样间隔GSD的大小,也就是影响了图像的分辨率。
6、(3/2)全画幅36mm*24mm,4/3CMOS物理尺寸18mm*13.5mm,物理尺寸差了4倍,你说谁的效率高。
6、航拍中对数码相机的要求
根据CH/Z 3005-2010,无人机航测采用的数码相机应满足以下要求:
(1) 基本要求
a. 相机镜头应为定焦镜头,且对焦无穷远;
b. 镜头与相机机身,以及相机机身与成像探测器稳固连接;
c. 成像探测器面阵应不小于2000万像素;
d. 最高快门速度不低于1/1000s。
(2) 检校要求
a. 相机检校参数应包括:主点坐标、主距和畸变差方程系数;
b. 相机检校时应在地面或空中对检校场进行多基线多角度摄影,通过摄影测量平差方法得到相机参数最终解,并统计精度报告;
c. 检校精度应满足:主点坐标中误差不应大于10um,主距中误差不应大于5um,经过畸变差方程式及测定的系数值拟合后,残余畸变差不应大于0.3像素;
d. 其他检校要求按CH/T 8021执行。
(3) 数据动态范围
数据每通道的数据动态范围不应小于8bit,可采用压缩格式,压缩倍率不应大于10倍。
(4) 存储
相机存储器可容纳影像的数量不应少于500张。
(5) 供电
相机电池可支持连续工作应不少于2小时。
从中我们可以看出航测中对于相机有严格的要求,并不是普通的单反甚至微单相机就能进行摄影测量,好了,不多废话,下面我们进入正题。
在航测后期处理影像时,你有没有看到结果有这样的疑惑?
7、相机对测绘精度匹配的影响
POS精度比较好,连接点数量足够多。测区为什么匹配不上连接点?
连接点数量精度够好,控制点立体量测位置检查了八遍,平面精度挺好,高程残差总是1、2米! 控制点位错了?坐标系不对?软件不行?电脑不行?我不行?
原因就在于“畸变”二字,本文主要从相机影像畸变和相机参数的设定来详细讲解:
一:相机影像畸变
什么是影像畸变:
影像畸变:是指遥感影像与其所反映的地表真实景像之间产生的光谱特性和几何特性方面的误差。即辐射误差和几何误差。前者表现为影像在灰度上的失真;后者表现为几何关系上的变形。影像畸变是检验遥感影像判读与制图性能的重要标志。不了解影像畸变性质及其程度而使用未经校正的有畸变的遥感影像,不可能获得正确的应用效果甚至适得其反。故遥感影像原始数据,通常要进行辐射校正和几何校正。
影像畸变原因分为两大类:
①系统畸变,又称内部畸变。指成像系统(包括传感器及其运载工具)内部变化所引起的畸变。
②非系统畸变,又称外部畸变。由外部环境因素变化造成的畸变。如太阳位置变化、大气对电磁波辐射的影响、地球曲率、地球自转和地形起伏等。
对于系统畸变可通过传感器系统参数或姿态参数测定来确定;大部分非系统畸变往往是随机的,下面我们针对两个方面来讲解系统畸变也就是物理畸变:
①相机检校畸变参数的获取;
②畸变影像的纠正。
1.1 相机检校畸变参数的获取
传统室外、室内检校场检校结果可靠,但需严格测定标志点物方三维坐标,且需定期复测,建设及维护成本高。给大家推荐几种临场相机检校软件,航天远景EasyCalibrate、inpho相机自检模块和Matlab相机检校模块。 其校检依据为张正友在1999年发表的那个基于棋盘格的相机检校方法,因此,被大量应用于相机检校中,几乎成为计算机领域相机检校的标准算法。
主要流程是:相机从不同角度(正/上/下/左/右)拍摄标靶,使得二维的平面检校场相对相机产生真室的三维效果,后经过软件处理得出相机镜头畸变参数。
但有一点经常很被人忽略,畸变参数是随镜头的调焦与对焦而变化的!这就是说摄影测量中,一旦检校完成,相机就不能改变对焦,要不然就白检校了!!!(这也是航测中为什么要使用定焦头,手动对焦的原因)。
那么,问题来了!目前很多检校方法都是室内的,对焦环调到无穷远时,由于空间局限,拍摄的图像不清楚,图像不清楚,标靶提取的精度就无法保证,更不要说是极其精密的相机检校精度质量了,需要解决的矛盾是:相机对焦需要无穷远和小范围室内检校场的空间限制之间的矛盾。
下图是索尼35mm镜头,在对焦无穷远时,在3-4米拍摄的图像结果
用这样的检校结果用于航测,结果可想而知。
正确的相机检校方法
下图就是一种合适的检校标靶布设方式
使用的是离散标靶,从而可以让场景变大,使在无穷远对焦时能保证图像清晰;同时可以让标靶更易于布置,更好的分布图像的四个角点,更容易符合相机检校的真实情况,另外,由于拍摄距离稍远,所以,图像清晰度也可以得到较好的保持。
1.2 畸变影像的纠正
当我们拥有了相机的校检畸变参数时,可以通过影像纠正软件来进行畸变影像的纠正,类似的软件还是比较多的,例如:LensDistortion软件、飞马无人机管家等。
主要流程是:分别把畸变参数一一对应填写,如果软件识别不到相机名称和相机参数,需手动填写相机参数。选择输出目录确定即可。
二:相机参数的设定
谈到相机参数的设计,我们肯定会想到几个词汇快门、光圈、感光度、景深,不是很明白的我们再详细说下他们各自的含义:
快门 :是控制曝光时间的机件,快门从打开到关闭所经历的时间称为曝光时间,或称快门速度。快门与光圈的适当组合,可以使数码相机的影像传感器表面获得准确的曝光。在拍摄时,选用较快的快门速度,可以防止因相机与景物之间的相对位移造成的影像模糊。
光圈:用来控制透过镜头进入机身内感光面的光量,是镜头的一个极其重要的指标参数,通常在镜头内。它的大小决定着通过镜头进入感光元件的光线的多少。通常用F值(F=镜头的焦距/镜头光圈的直径)来表示。
感光度:在数码摄影中是相机影像传感器对光线敏感程度的度量标志,经常采用“ISO”来表示。数码相机的ISO是通过调整感光器件的灵敏度或者合并感光点来实现的,提高感光度,不仅可提高相机拍摄黑色调景物的能力,还可以提升快门的速度;降低感光度即降低了图片中影调的亮度,但可以使深暗色调的景物色彩得到较好的再现。
景深:是指在摄影机镜头前沿着能够取得清晰图像的成像器轴线所测定的物体距离范围。通常在聚焦完成后,在焦点前后的范围内都能形成清晰的像,这一前一后的距离范围,便称之为景深(缩写为D.F)。
三:那么怎么才能拍摄出清晰的影像了?
正确的对焦 (被拍摄对象所反射的光聚焦在传感器上,同样F值限制了景深),正确的能量(光照强度,感光度iso,光照射时间-快门,光量-光圈大小F值),能量不足,欠曝光,能量过多,过曝光。
第一步:焦点的调整
天气晴好的条件下,顺光找到一个棱角分明的,且颜色反差较大的被拍摄对象(房屋角,窗户角),距离相机200米至300米左右的距离,使用自动(通常是自动,手动也可)拍摄照片,然后调节到手动,再拍摄一张照片;将照片导入计算机,注意在计算机上看,不是在相机上看。
如下这张照片,一个房屋的角,放大之后成马赛克状,边缘的一个马赛克能否分清属于房屋还是属于地面,如果能分清,那么对焦正确; 200米对焦正确之后,不要动对焦,在手动对焦状态下,不动对焦环的情况下,再拍摄一张50米远外的目标,同样是能够正确对焦的情况下,即可锁定对焦环(贴胶带)。固定对焦环之后,再重复上述过程,检查是否正确对焦,如果不是,拆开重复上面过程。
第二步:航测相机的设置通常(注意是通常,不是说一定)有两种设置方法:
快门优先,快门速度和和感光度iso固定为设定值,光圈相机自动调节,快门速度根据无人机飞行速度设定,一般在1/650 到1/1500之间,感光度iso设定在200左右,光圈相机自动调节。
全手动状态下,快门速度固定在1/650 到1/1500 秒(飞行速度越快,高度越低,快门速度要求越快),F值设定在5.8到8左右,自动获取iso值的设置。
这样相机的设定(焦点,光圈,快门,iso)就完成了。但是,这并不是绝对的!
通过大量的航拍试验分析,我们归纳总结了影响相机参数设置的主要因素。
1)光源的强度。光源的强度是影响摄影曝光的重要因素之一。野外摄影的光源主要是自然光,而自然光的强弱又与天气阴晴、时间早晚、季节变化和地域差异有密切的联系。天气的变化一般可分为晴空万里、薄云蔽日、 阴云遮日、乌云密集,这4种天气在曝光控制上,一般为各差1级光圈或快门速度。光源的强度还伴随着时间的不同而有所差别:中午前后最大;日出后和日落前2 h为中午的1/2;日出后和日落前1 h约为中午的1/4~1/5。日出时和日落时约为中午的1/10。实际中应根据不同时间来调节曝光量。
2)测光。在具体拍摄时,根据曝光需求来设置测光模式,期间多注意观察环境光线,并估算被摄物体的色调与环境的反差之间的关系,从而适当调整光圈和快门,来获取各种不同需求的影像。在实际作业中一般先远处后近处测光,最后根据实际选取。
因此,要获取成像清晰、层次丰富、色调柔和且色彩平衡的影像,对于不同的地物、地貌,相机设置有不同的参数。
8、GSD 与飞行高度的关系
客户 A 需要 GSD 为 5cm/pixel的数据,那 GSD 是什么呢?GSD 为地面影像分辨率,是指图像中相邻两个像素中心的距离代表实际距离是多少,飞行高度决定了地面影像分辨率(GSD)。飞行高度与地面影像分辨率成反比,飞行越高地面影像分辨率越低。那他们具体的关系是什么呢?
以大疆精灵 Phantom 4 RTK 为例,像元大小为 2.41 微米,相机焦距为 8.8mm,代入公式得H≈36.5*GSD。那客户 A 需要的 GSD为5cm/pixel 的数据,通过计算得到的飞行高度约为182 米。考虑到飞行时的环境影响,我们一般会低于计算得到的飞行高度去作业,我们可以选取 150 米的飞行高度来确保得到的数据满足客户要求。
9、比例尺与飞行高度的关系
客户需要 1:500 比例尺数据,那我们如何设置飞行高度来满足这一要求?GSD 反映了像素与实际距离的关系,比例尺表示图上距离与实际距离的关系。那我需要知道像素与图上距离的关系,才能解决 GSD 与比例尺之间的转换关系。这里我们要引入一个 DPI 概念,DPI 可理解为每英寸的像素数。比如打印地图时,打印机分辨率为 300DPI,那么打印的地图中
1 英寸= 300 个像素1 英寸= 2.54 厘米1 像素= 2.54/300 ≈ 0.008467 厘米
如果打印的地图比例尺为 1:500则地图上一个像素代表0.008467*500≈ 4.23厘米
以此类推比例尺为 1:1000 1像素=0.008467*1000≈8.47 厘米比例尺为 1:2000 1像素=0.008467*2000≈16.93 厘米所以当 DPI 为 300 时,可得以下表格
| 成图比例尺 | 地面影像分辨率GSD(厘米/像素) |
| 1:500 | 4.23 |
| 1:1000 | 8.47 |
| 1:2000 | 16.93 |
在实际作业中,需要考虑到成图误差,我们选取理论值两倍 GSD 保障作业精度。
10、精度与飞行高度的关系
客户 C 要的精度不能超过 5cm 指的是什么呢?精度分为相对精度和绝对精度两种,相对精度指的是在合成的模型上测量的精度,比如要测量模型中道路的长度,测量得到的数据与实际的差异是多少。绝对精度指的是合成模型上地物的位置与实际位置的差异,比如模型中路灯的位置与实际位置的差异是多少。
以大疆精灵 Phantom 4 RTK 为例,在厘米级的定位条件下其相对精度和绝对精度能达到1~2*GSD。什么意思?比如客户需要相对精度为 5CM 的数据,我们飞行时采用的 GSD 可为2.5~5cm/pixel。为了保证效果,实际飞行时我们可以采用 GSD为 2 cm/pixel,飞行高度约为 73 米进行数据采集。
11、图像精细度与飞行高度的关系
客户 D 说我要能看出电线的模型,那如何能把电线重建出来呢?要重建一个物体,这个物体在图像中要至少占用两个像素。以电线为例,高压线顶上的地线直径约为 1.6cm,那我们拍摄时选取的 GSD 最大为 0.8cm/pixel。以大疆精灵 Phantom 4 RTK 为例,在飞行时距离电线不要超过 29 米。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











