









《Nonparametric Structure Regularization Machine for 2D Hand Pose Estimation》
原文链接:https://arxiv.org/pdf/2001.08869.pdf
源码链接:https://github.com/HowieMa/NSRMhand
文章目录
0 Abstract
手势姿态估计(Hand pose estimation)相比身体姿态估计(body pose estimation)更具挑战性,因手关节更加灵活,动作敏捷和自我遮挡影响( highly articulated and dexterous, and suffers severely from self-occlusion);当前部分2d关键点学习方法,如CPM,仅仅对关键点位置进行估计,并没有对估计对象关键点相关结构进行约束。
本文提出一种新的非参数结构正则(NSRMhand:novel Nonparametric Structure Regularization Machine)来做2D手势估计。将手部结构信息融入到姿态估计中,并且不需要额外的训练信息;相对CPM,在数据集OneHand 10k和CMU Panoptic Hand上分别提升精度1.17%,4.01%。
1 Introduction
本文创新
- 提出NSRM约束。将合成的二维手部掩膜( hand mask)融合到姿态估计中,并且是由关键点派生出来的,不需要额外的标注信息
- 提出一种新颖的手部肢体(hand limbs)概率表示方法和一种具有解剖学灵感的手部掩膜合成策略
2 Related work
2.1 Human pose estimation
- CPM
- PAF
- offset field【20】
- structural-aware loss【12】
- 。。。。
2.2 Hand pose estimation
近年来一些主流方法
- 多视角RGB方法
- 深度相机方法
- 单视角RGB方法
- 典型的CNN:CPM,SHG,Resnet
- 嵌入实例分割
3 The model
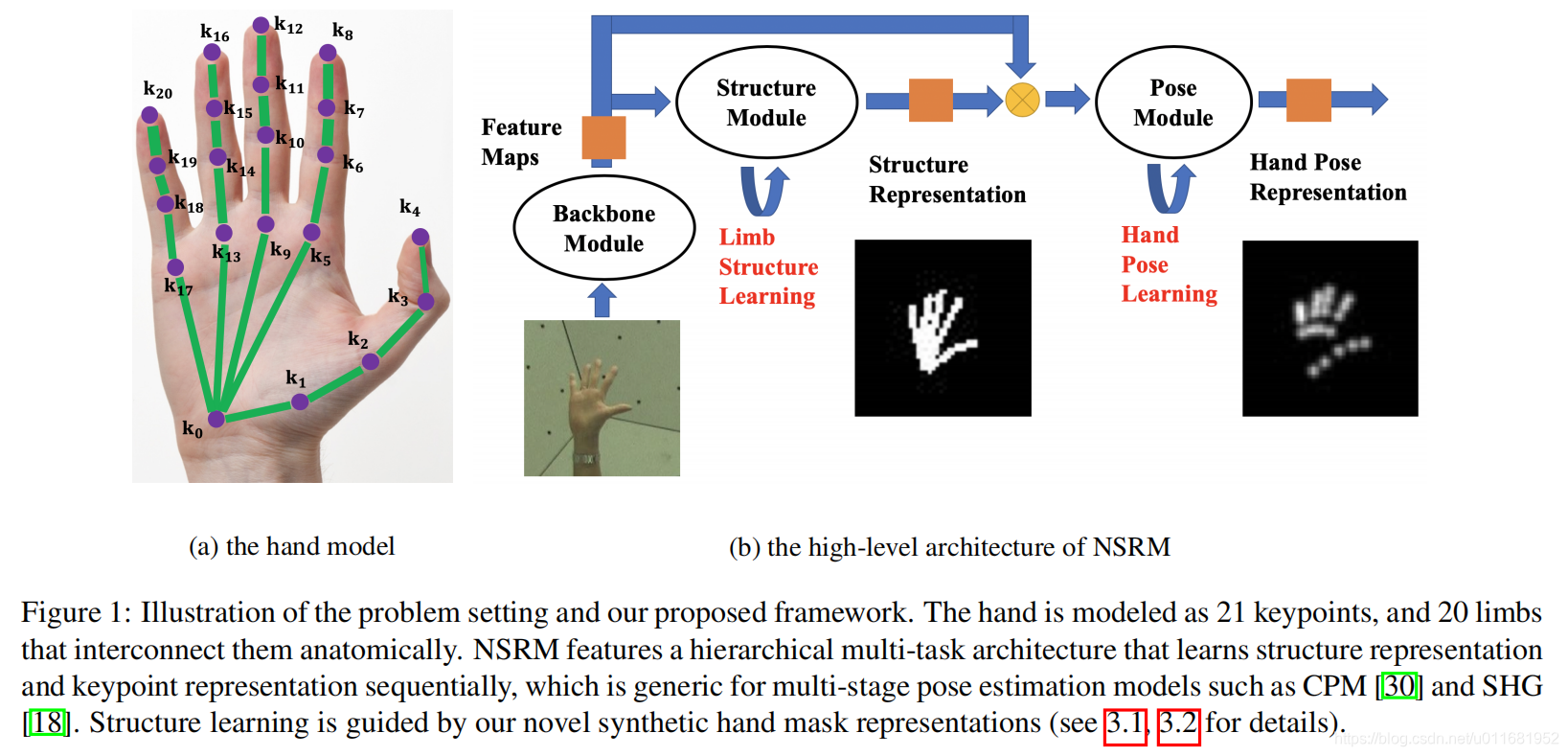
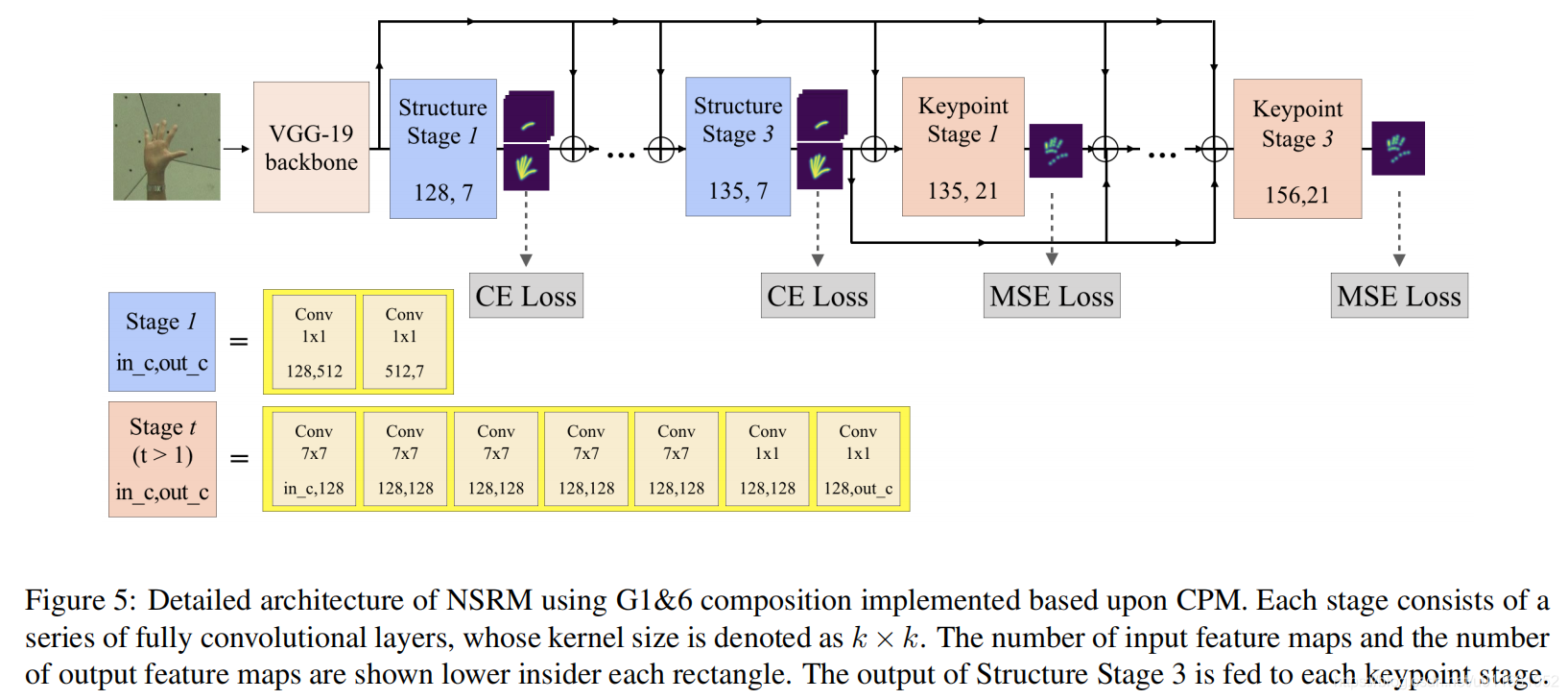
整体结构如上图,整体结构采用级联多任务结构,共计21个关键点,20个肢体;设计思路如下:
- 首先:骨干网络对手部图形进行特征提取,得到Feature Maps
- 其次:将Feature Maps送入结构模型进行肢体结构学习(Limb Structure Learning),得到Structure Representation
- 然后:将Feature Maps和Structure Representation进行融合
- 最后:进行姿态估计学习(Hand Pose Learning),输出hand pose(keypoint confidence maps (KCM))
3.1 Limb mask representation
-
什么是Limb?
本文定义关键点 i i i和 j j j之间部分为1个肢体 L L L -
如何表示Limb?
文中提出2种Limb的表示方法 -
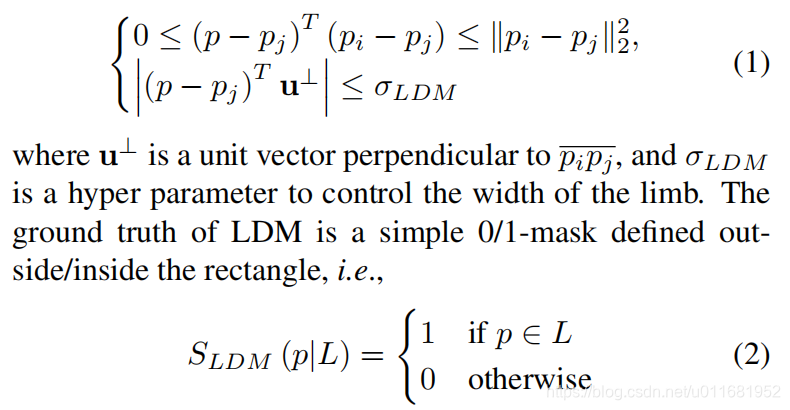
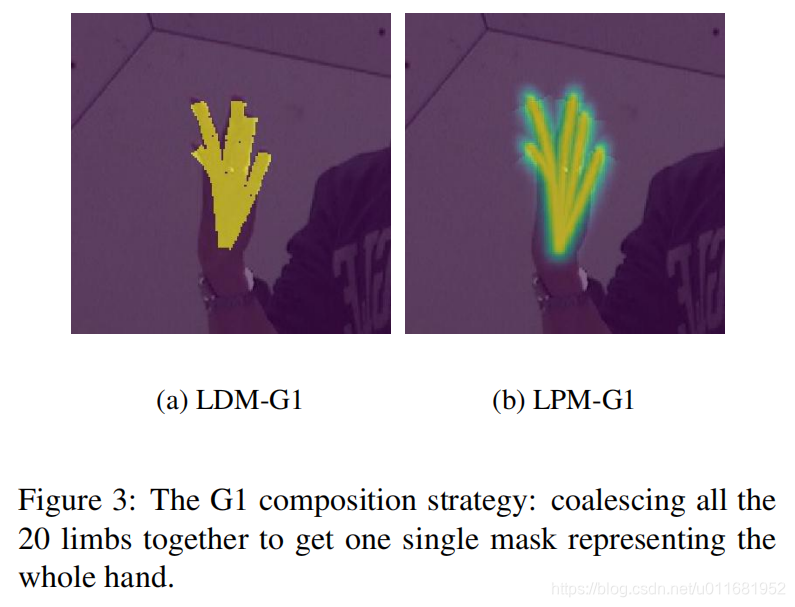
Limb Deterministic Mask (LDM)
LDM定义2个关键点之间(即每个Limb),直线段 p i p j ‾ \overline{p_ip_j} pipj固定宽度之间的像素响应为1,其它位置响应为0;即0/1-mask
-
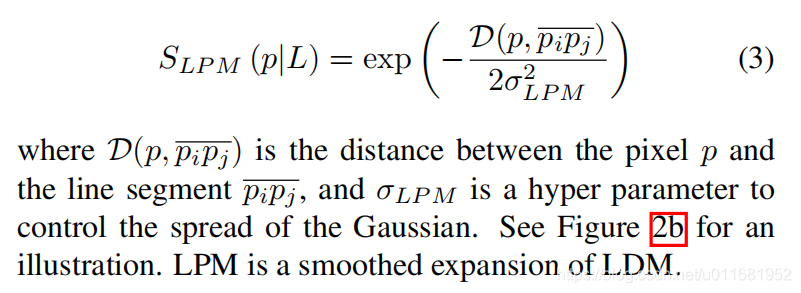
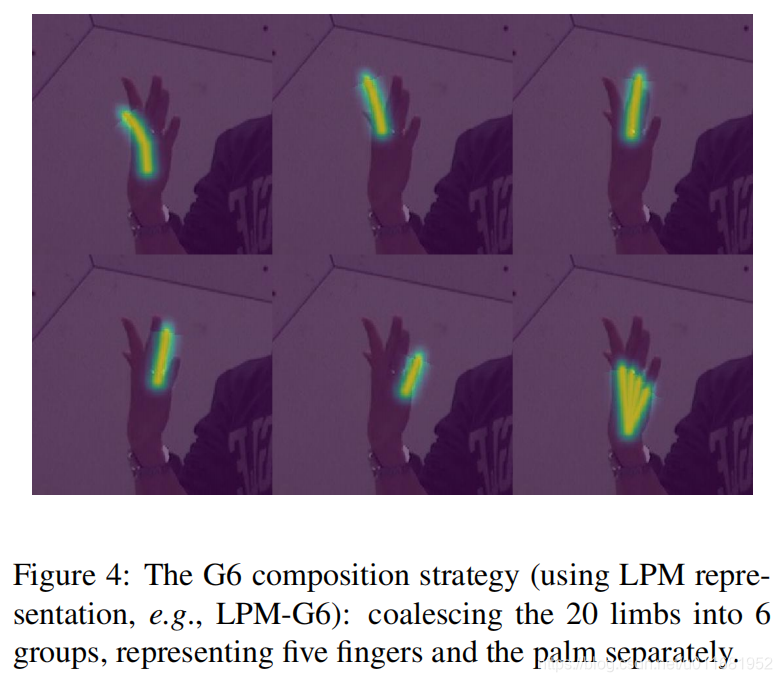
Limb Probabilistic Mask (LPM)
LDM定义上,在对mask表示时,如上式2,用0/1表示,有些粗糙,在实际应用中不是最佳。LPM采用高斯概率模型来生成mask( Gaussian-alike confidence value)
-
LDM与LPM效果图:
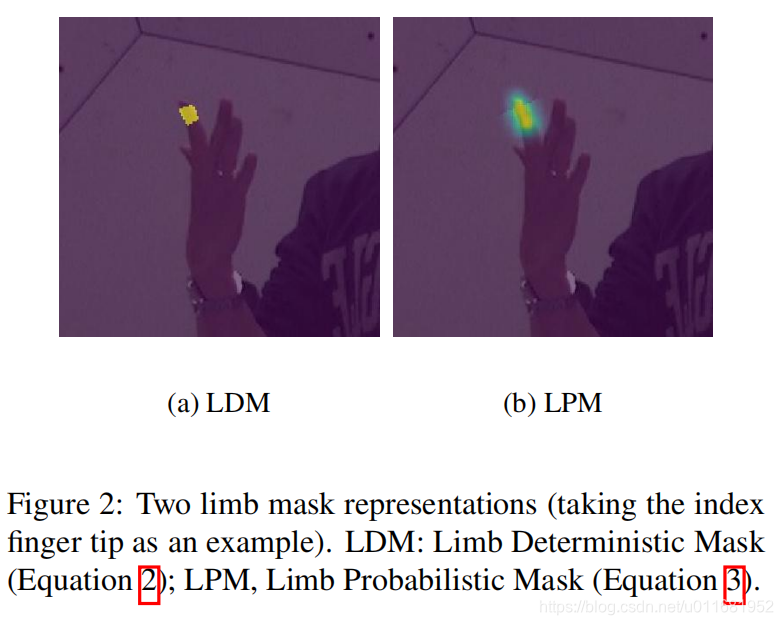
-
延伸阅读
这个表示方法与CMU(openpose)提出多人姿态估计方法PAF有相似之处;以及人脸关键点论文LAB也有相似之处。这2篇论文都是经典论文,本人都曾翻译过,有兴趣可以点开看看。
3.2 Limb composition
- 对单个的Limb表达上面已经有了,接下就是如何将它们组合成解刨学上合理的群体(groups)?
- 策略1:将20个limb组合在一起,成为一整个hand mask,关注整体,命名为:G1
- 策略2:20个limb分为6组,5个手指和1个手掌,更关注局部细节,命名为:G6
- 数学表达

3.3 Loss function and training
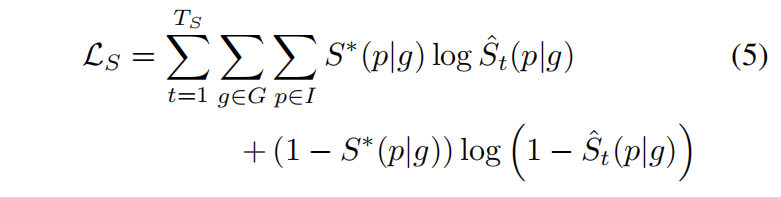
本文将NSRM融入到CPM中,如下图,当然NSRM也可融入到其它模型中。训练中对Structure Stage进行CE Loss进行监督学习,标签是根据关键点生成的mask,而不是人工标注的mask;对Keypoint Stage进行MSE Loss监督学习,标签是根据关键点生成的热力图map
- CE Loss
- MSE Loss
- Loss

4 Experiments
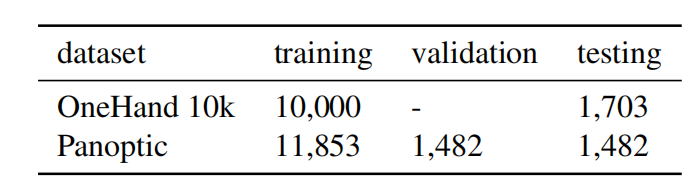
4.1 Datasets
- OneHand 10K
- Panoptic
4.2 Experimental settings
具体网络结构参数,训练参数,源码中都有体现,读者训练移步研究
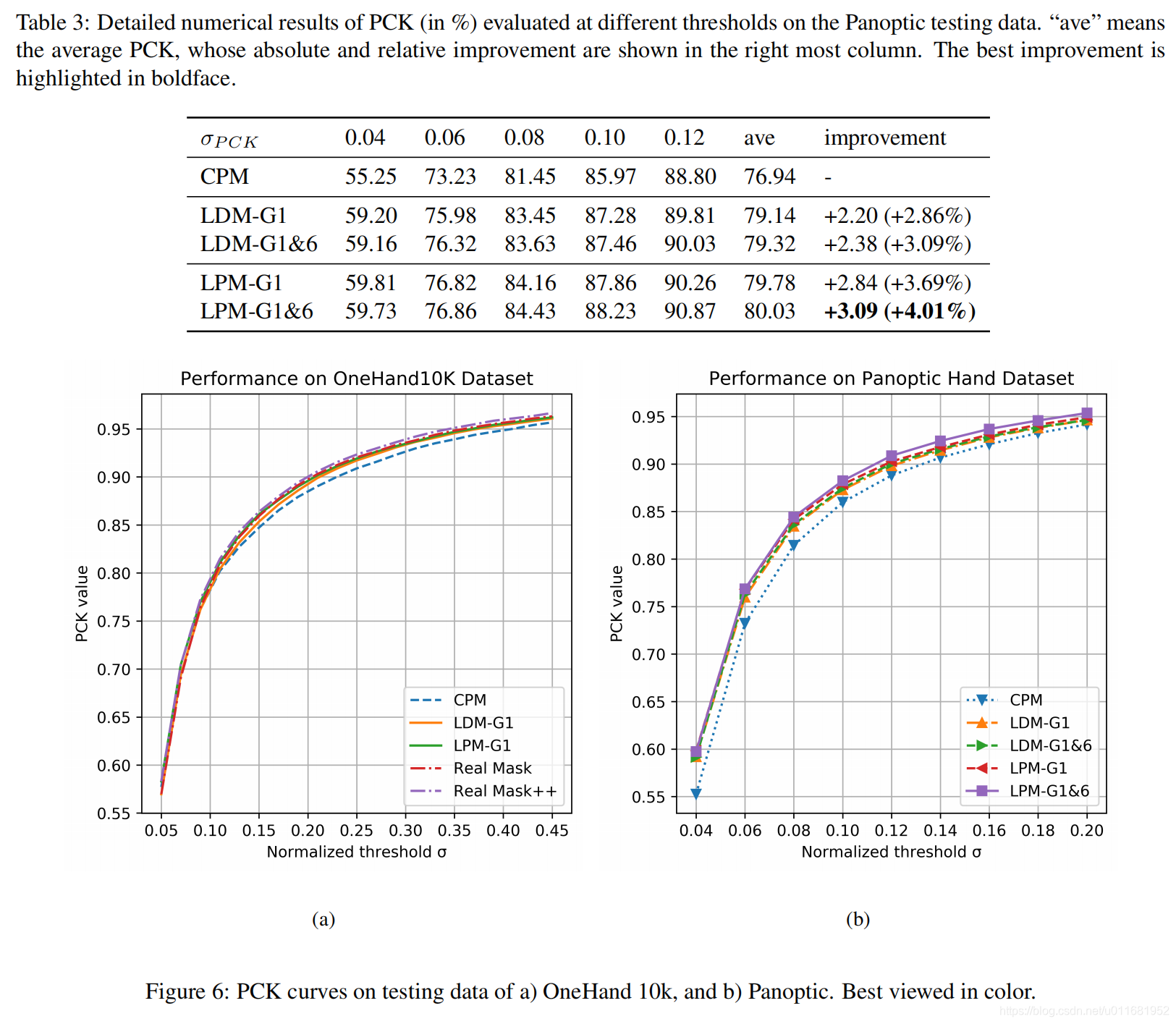
4.3 Quantitative results
- Mask对比
本文方法较CPM精度有所提高;但相对使用真实Mask训练,还是低一点点。但对于没有真实mask标签的数据集来说,该方案值得借鉴,毕竟标注mask很昂贵
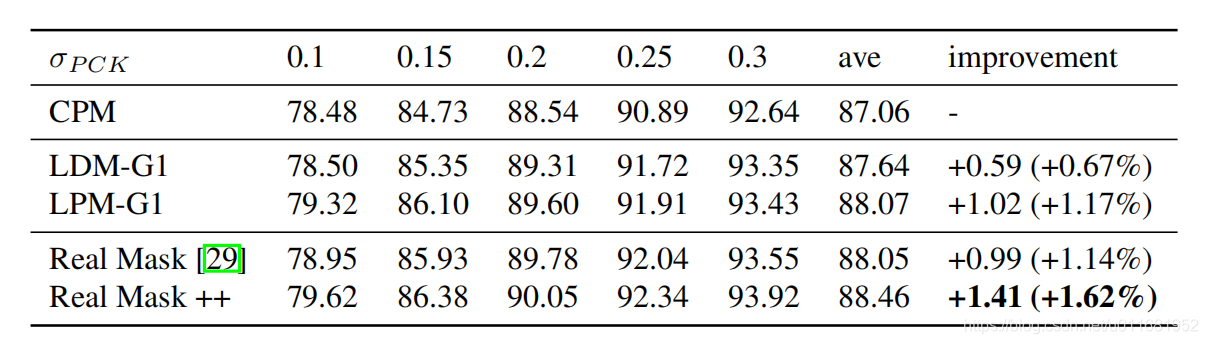
2. LDM与LPM对比、groups对比
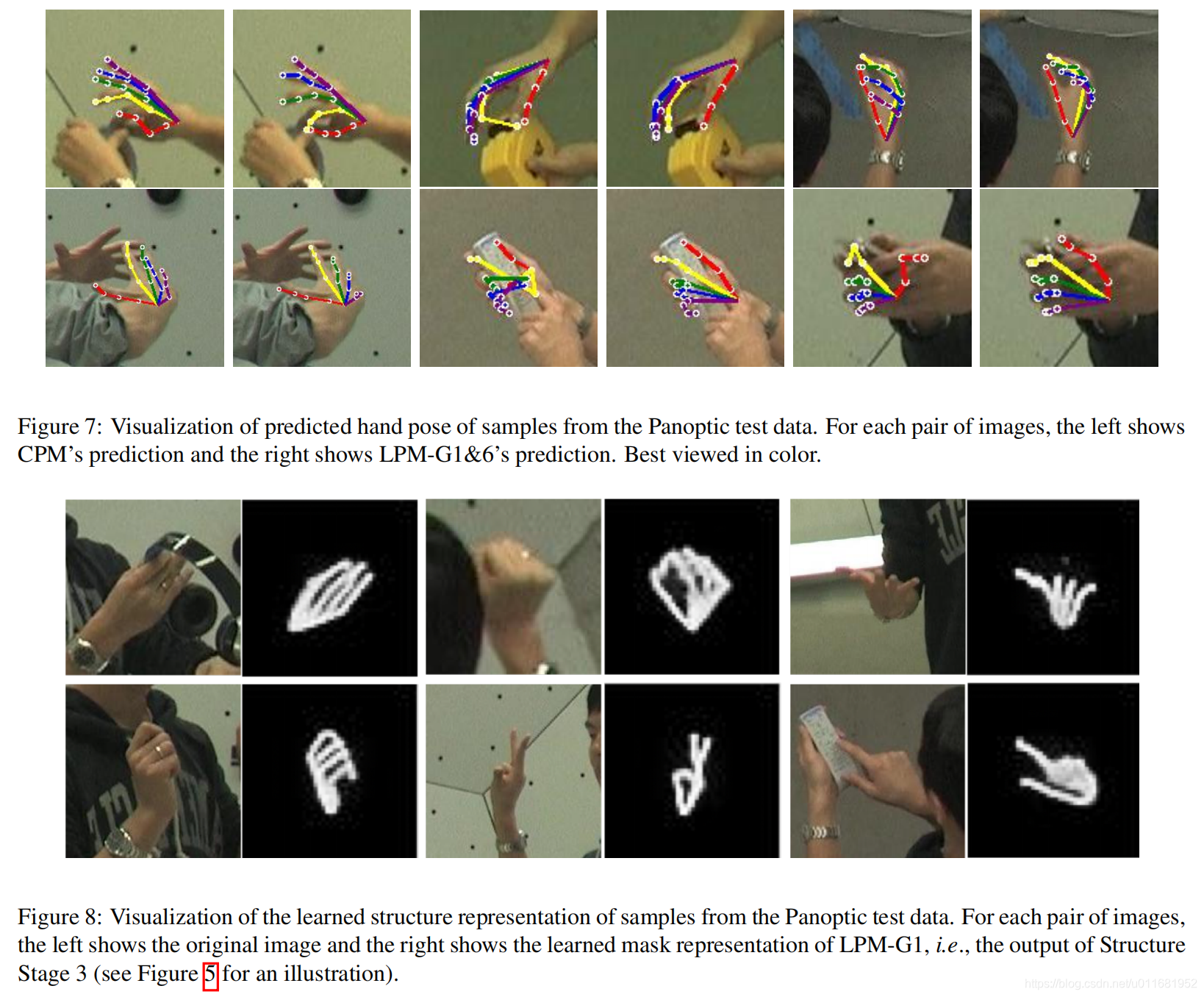
4.4 Qualitative results














 2118
2118











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









