







 本文详细介绍了如何配置Fanuc机器人伺服焊枪,包括检查硬件和软件、设置附加轴参数、伺服焊枪压力标定、电极头磨损测量初始设置、电极头修磨参数设置、TCP设定和负载设置等步骤,确保焊枪能够安全、准确地工作。
本文详细介绍了如何配置Fanuc机器人伺服焊枪,包括检查硬件和软件、设置附加轴参数、伺服焊枪压力标定、电极头磨损测量初始设置、电极头修磨参数设置、TCP设定和负载设置等步骤,确保焊枪能够安全、准确地工作。
更多机器人技术分享可关注公众号:A自动化项目实战

目录
- 准备工具
- 检查硬件、软件
- 配置附加轴参数
- 伺服焊枪设置
- 伺服焊枪压力标定
- 电极头磨损测量初始设置
- 电极头修磨参数设置
- 设定TCP
- 设置负载
1准备工具
- 小容量U盘(首先做好镜像备份和全备份,用于故障恢复)
- 卡尺(测量焊枪开口大小实际数值);
- 压力测定仪器(焊枪压力标定,需要2人互相配合进行);
- 纸、笔(记录焊枪压力数值);

2检查焊枪硬件和软件
2.1检查硬件
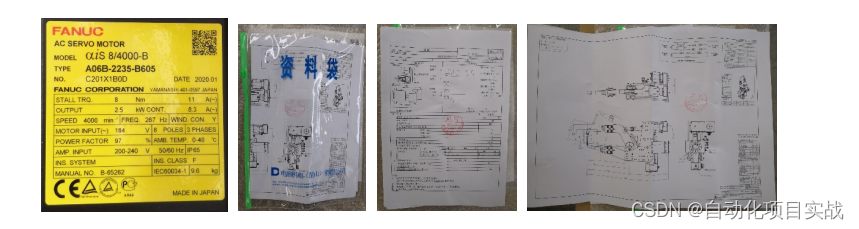
- 地脚螺栓是否固定到位,机器人是否接地线,焊枪部件有无损坏,接头、线缆、水管等是否完好,连接是否正确等,焊枪轴能动后检查电极对中性。

- 焊枪电机参数铭牌、焊枪参数铭牌、焊枪参数清单是否清晰完好,拍照记录,纸质清单等保存好;
2.2检查软件是否安装正确:
选择示教器 [MENU] -> [0: NEXT] -> [4: STATUS] -> [Version ID] -> [NEXT] -> [ORDER FI],进入软件订购文件界面,查看当前安装的各种选项是否正确,按[YES]翻页。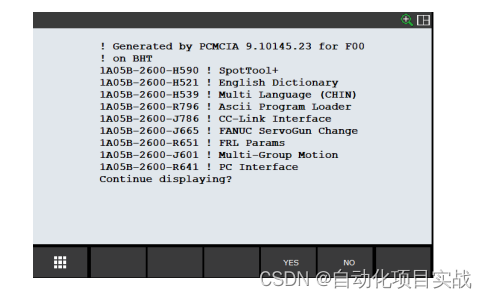
按[SELECT]来到程序一览界面,检查电极头磨损测量程序是否存在。
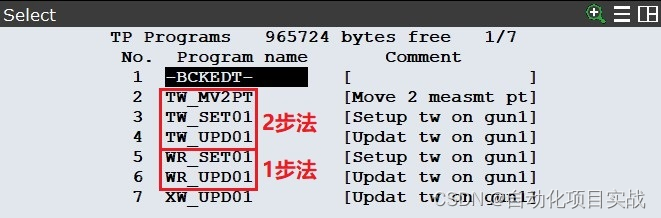
若程序不全,设定变量$SGSYSCFG. $LOAD_TWD=11,重新通电,检查所需程序是否存在。
设定压力单位,查看变量$SGSYSCFG.$PRS_UNITS的值,“0”表示kgf千克力,1表示bf磅,2表示nwt牛顿,设定为 “2”。

3进入控制启动配置附加轴参数。
V8.3版本之前的系统进入控制启动模式的方法是,同时按住示教器“PREV”和“NEXT”按钮不放,接通电源,在启动界面选择“Controlled start”进入控制启动模式。
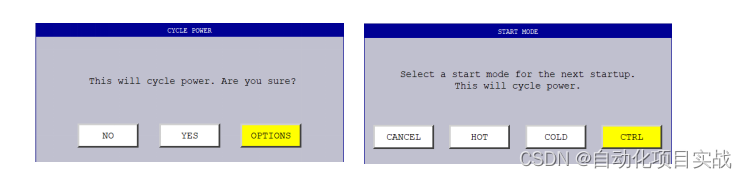
V8.3及之后版本的系统,开机状态下,可快速进入控制启动模式。选择示教器辅助功能键FCTN-NEXT-CYCLE POWER,点击“OPTIONS” —“CTRL”即可进入控制启动。
选择“MENU”—“9 Maintenance”,进入到机器人维护功能。
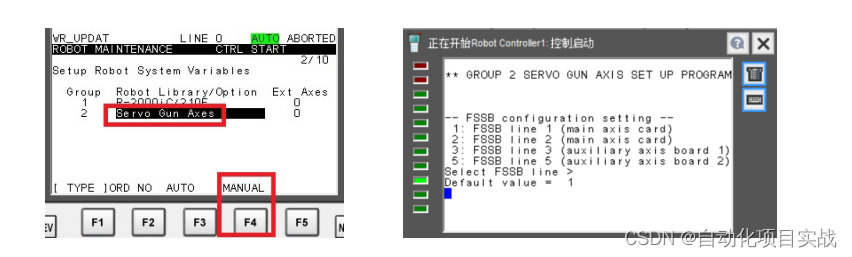
选择“2 Servo Gun Axes”,按“F4 MANUAL” 。
选择FSSB路径,根据实际情况设置,参考下图,一般设定“1”。
选择第2动作组起始轴,机器人本体有6轴时,此处填“7”。
第2动作组附加轴配置页面:
选择“2”,增加伺服枪轴。
选择“2”,完整配置。
选择电机型号,若不属于此页面型号,选择“0 other”,出现以下画面。
一般选择“1: Standard Method”,标准方法。
查看电机铭牌,选择正确的电机型号。
选择附加轴伺服放大器允许最大电流。
查看焊枪轴伺服放大器型号,例如下图中,aiSV后面的“80”为最大电流值。
选择放大器编号,按实际情况设定,一般构成(6轴机器人(组1)+伺服枪(组2))的情况下,选“2”。
设置传动比。输入伺服枪电机旋转一周时,电极帽的移动量(mm/rev)。查看焊枪资料册,找到正确数值。
若不知道数值,填“0”,稍后测定。
设定电机旋转的方向,这个标记决定了当按下正运行键时电机的运转的方向,若不知道则选“1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2309
2309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











