







 本文档详述如何在ROBOGUIDE中使用FANUC机器人进行X型点焊焊枪的气动点焊仿真操作。教程涵盖从系统创建、焊枪配置、I/O信号设定到程序编写和仿真运行的全过程,特别强调了点焊设备和控制器的I/O信号设置。最后,提供了仿真案例资源下载。
本文档详述如何在ROBOGUIDE中使用FANUC机器人进行X型点焊焊枪的气动点焊仿真操作。教程涵盖从系统创建、焊枪配置、I/O信号设定到程序编写和仿真运行的全过程,特别强调了点焊设备和控制器的I/O信号设置。最后,提供了仿真案例资源下载。
目录
概述
在ROBOGUIDE软件中除了可以仿真FANUC机器人伺服焊枪点焊焊接外,还可以仿真气动焊枪点焊焊接。现阶段,由于气动点焊焊枪控制上的局限性所致,机器人气动焊枪点焊焊接应用已经越来越少了,但是有些工况还会使用到。相较于伺服焊枪点焊焊接而言,气动焊枪点焊焊接的配置与应用要简单很多。
FANUC机器人气动点焊焊接是通过嵌入在机器人控制器中的专业应用程序软件包SpotTool+来实现的,SpotTool+具有专门的点焊焊接应用指令、点焊设备I/O接口、点焊工艺参数配置界面,能够使用户方便快捷地实现气动点焊配置与示教编程操作,同时准确高效地实现机器人点焊焊接。
当然,SpotTool+也是FANUC机器人螺柱焊接的应用程序软件包,因此实现螺柱焊接时也要选择SpotTool+。
先来看一下仿真运行效果,如下方视频所示,FANUC机器人完美实现了X型焊枪气动点焊焊接虚拟仿真。
ROBOGUIDE虚拟仿真:FANUC机器人X型点焊焊枪气动点焊
使用软件版本:ROBOGUIDE V9.4
机器人系统创建
在ROBOGUIDE软件中利用工作站创建向导(Workcell Creation Wizard)创建FANUC机器人系统,每一步的设定参数如下所示。
Step 1-Process Selection:HandlingPRO,工艺选择为搬运模块
Step 2-Workcell Name:SpotWelding,工作站名称可根据实际需求自定义
Step 3-Robot Creation Meghod:Create a new robot with the default HandlingPRO config.机器人创建方法为使用默认的搬运模块配置来创建新的机器人
Step 4-Robot Software Version:V9.40,机器人软件版本选择为最高版本,即V9.40
Step 5-Robot Application/Tool:SpotTool+(H590)、Set Eoat later,机器人应用程序和工具选择为点焊工具,也就是气动点焊应用程序软件包,工具选择为稍后设置
Step 6-Group 1 Robot Model:H721(R-2000iC/165F),组1的机器人模型选择为H721(R-2000iC/165F)
Step 7-Additional Motion Groups:附加运动组(外部轴)保持默认配置
Step 8-Robot Options:机器人选项保持默认配置
Step 9-Summary:配置参数总结保持默认

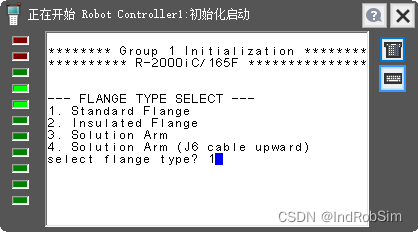
在机器人控制器初始化启动过程中会弹出选择法兰类型(FLANGE TYPE SELECT),输入“1”,即使用标准法兰(Standard Flange),按“ENTER”键。
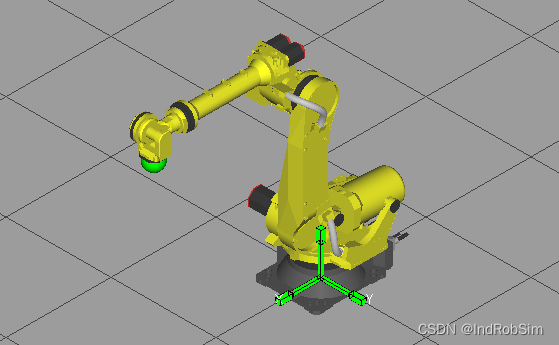
机器人控制器初始化启动完成后,在软件的视图窗口中出现了选择的FANUC机器人模型,如下图所示。
X型点焊焊枪安装与配置
从ROBOGUIDE软件内置的模型库中,选择1把X型点焊焊枪,将其安装到FANUC机器人上,焊枪详细配置参数如下所示。
焊枪模型名称:xgun01
UT:1→General→Location:(0,0,0,0,0,180),设定X型点焊焊枪在FANUC机器人上的安装位置坐标
UT:1→General→UTOOL:(-100,0,765,-180,-90,0),设定FANUC机器人的TCP坐标
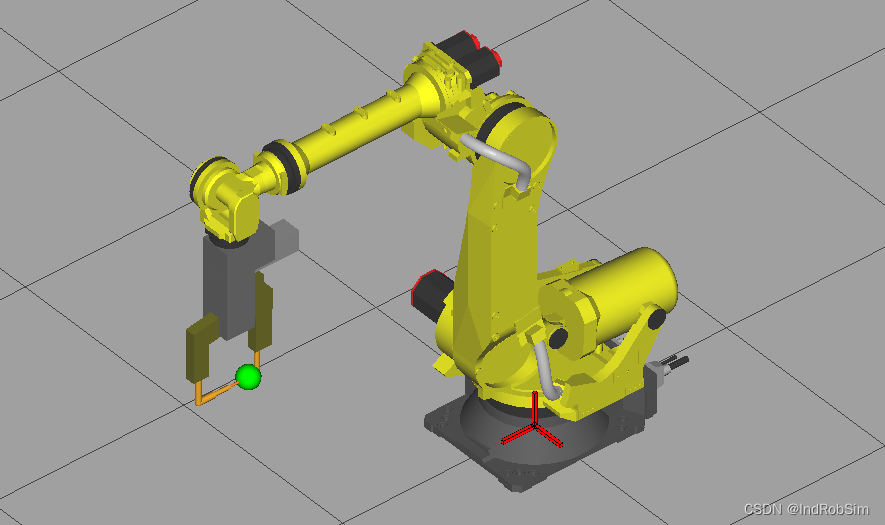
X型点焊焊枪安装完成之后,软件视图窗口中的机器人如下图所示。
机器人组输出(GO)信号配置
FANUC机器人通过组输出(GO
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5956
5956

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











