






 文章讨论了在NX刀路编辑中,不同版本间的函数调用差异,特别强调了UFUN中关于不同类型刀路(如直线、圆周等)的事件ID。还提到UDOP创建的刀路具有定制性质,参数调整需重新生成,因为其底层逻辑使用的是定制feedsubtype类型。
文章讨论了在NX刀路编辑中,不同版本间的函数调用差异,特别强调了UFUN中关于不同类型刀路(如直线、圆周等)的事件ID。还提到UDOP创建的刀路具有定制性质,参数调整需重新生成,因为其底层逻辑使用的是定制feedsubtype类型。
一、在做刀路编辑的时候,如果基于NX12以及以上版本,NXOpen封装好了编辑和读取刀路的函数,但是在一些低版本中,实现此功能,需要一些dll导出函数。在libcamsja.dll中NX也封装了一些比较方便的函数,但对于没有内部文档的非正规军,很难去猜测函数的参数类型。但可以通过apimotion可以看到一些调用函数,可以在libcams.dll中全部找到对应的编辑函数。在测试发现一些设置是无效的,开始以为函数不对,后来发现,刀路事件是分类型的,在UFUN帮助文档中给出了明确的类型:
#define UF_cevent_3x_linear_subtype 150
#define UF_cevent_3x_linear_with_feed_subtype 151
#define UF_cevent_3x_linear_cust_feed_subtype 152
#define UF_cevent_5x_linear_subtype 153
#define UF_cevent_5x_linear_with_feed_subtype 154
#define UF_cevent_5x_linear_cust_feed_subtype 155
#define UF_cevent_3x_circular_subtype 156
#define UF_cevent_3x_circular_with_feed_subtype 157
#define UF_cevent_3x_circular_cust_feed_subtype 158
#define UF_cevent_5x_circular_subtype 159
#define UF_cevent_5x_circular_with_feed_subtype 160
#define UF_cevent_5x_circular_cust_feed_subtype 161
#define UF_cevent_3x_helical_subtype 162
#define UF_cevent_3x_helical_with_feed_subtype 163
#define UF_cevent_3x_helical_cust_feed_subtype 164
#define UF_cevent_5x_helical_subtype 165
#define UF_cevent_5x_helical_with_feed_subtype 166
#define UF_cevent_5x_helical_cust_feed_subtype 167
#define UF_cevent_3x_nurbs_subtype 168
#define UF_cevent_3x_nurbs_with_feed_subtype 169
#define UF_cevent_3x_nurbs_cust_feed_subtype 170
#define UF_cevent_5x_nurbs_subtype 171
#define UF_cevent_5x_nurbs_with_feed_subtype 172
#define UF_cevent_5x_nurbs_cust_feed_subtype 173
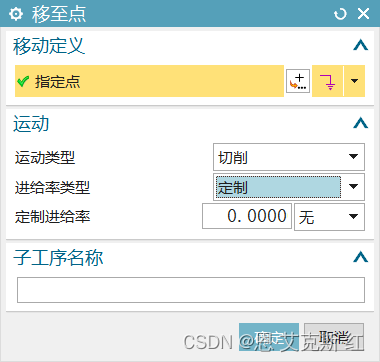
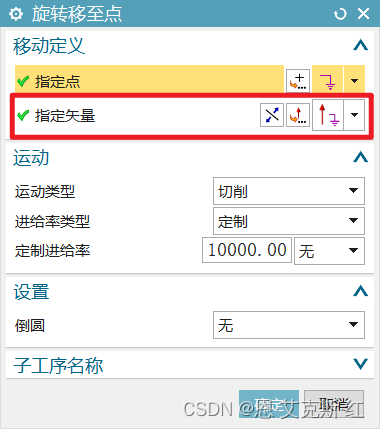
二、比如3轴或定轴刀路,编辑刀路界面中是不包含指定轴的,可以看下两张图对比,第一张图是三轴程序,第二张图是五轴程序:
三、对于UDOP创建的刀路,可以发现,他的运动类型是定制,与自带策略创建的刀路是不同的,二次修改程序转速进给,刀路是不继承的,还需要重新生成刀路,才生效。主要原因是,UFUN函数调用的底层逻辑创建的刀路类型是***_cust_feed_subtype类型,而且并没有提供设置接口。因此,可以通过刀轨编辑,来实现feed参数的调整。



















 731
731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











