代码
#include <opencv2/opencv.hpp>
#include <opencv2/features2d/features2d.hpp>
#include<opencv2/nonfree/nonfree.hpp>
#include<opencv2/legacy/legacy.hpp>
#include<vector>
using namespace std;
using namespace cv;
//sift进行特征点匹配
void SiftDemo(string fn1, string fn2)
{
Mat input1 = imread(fn1, 1);
Mat input2 = imread(fn2, 1);
SiftFeatureDetector detector;
vector<KeyPoint> keypoint1, keypoint2;
detector.detect(input1, keypoint1);
Mat output1;
drawKeypoints(input1, keypoint1, output1);
imshow("sift_result1.jpg", output1);
imwrite("sift_result1.jpg", output1);
Mat output2;
SiftDescriptorExtractor extractor;
Mat descriptor1, descriptor2;
BruteForceMatcher<L2<float>> matcher;
vector<DMatch> matches;
Mat img_matches;
detector.detect(input2, keypoint2);
drawKeypoints(input2, keypoint2, output2);
imshow("sift_result2.jpg", output2);
imwrite("sift_result2.jpg", output2);
extractor.compute(input1, keypoint1, descriptor1);
extractor.compute(input2, keypoint2, descriptor2);
matcher.match(descriptor1, descriptor2, matches);
drawMatches(input1, keypoint1, input2, keypoint2, matches, img_matches);
imshow("matches", img_matches);
imwrite("matches.jpg", img_matches);
}
//surf进行特征点匹配
void SurfDemo(string fn1, string fn2)
{
// TODO: Add your control notification handler code here
Mat input1 = imread(fn1, 1);
Mat input2 = imread(fn2, 1);
SurfFeatureDetector detector(2500);
vector<KeyPoint> keypoint1, keypoint2;
detector.detect(input1, keypoint1);
Mat output1;
drawKeypoints(input1, keypoint1, output1, cv::Scalar::all(255), cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
//drawKeypoints(input1,keypoint1,output1);
imshow("sift_result1.jpg", output1);
imwrite("sift_result1.jpg", output1);
Mat output2;
SurfDescriptorExtractor extractor;
Mat descriptor1, descriptor2;
BruteForceMatcher<L2<float>> matcher;
vector<DMatch> matches;
Mat img_matches;
detector.detect(input2, keypoint2);
drawKeypoints(input2, keypoint2, output2, cv::Scalar::all(255), cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
imshow("sift_result2.jpg", output2);
imwrite("sift_result2.jpg", output2);
extractor.compute(input1, keypoint1, descriptor1);
extractor.compute(input2, keypoint2, descriptor2);
matcher.match(descriptor1, descriptor2, matches);
drawMatches(input1, keypoint1, input2, keypoint2, matches, img_matches);
imshow("matches", img_matches);
imwrite("matches.jpg", img_matches);
}
//orb进行特征点匹配
void OrbDemo(string fn1, string fn2)
{
// TODO: Add your control notification handler code here
Mat obj = imread(fn1, 1); //载入目标图像
Mat scene = imread(fn2, 1); //载入场景图像
if (obj.empty() || scene.empty())
{
cout << "Can't open the picture!\n";
return;
}
vector<KeyPoint> obj_keypoints, scene_keypoints;
Mat obj_descriptors, scene_descriptors;
ORB detector; //采用ORB算法提取特征点
detector.detect(obj, obj_keypoints);
detector.detect(scene, scene_keypoints);
detector.compute(obj, obj_keypoints, obj_descriptors);
detector.compute(scene, scene_keypoints, scene_descriptors);
BFMatcher matcher(NORM_HAMMING, true); //汉明距离做为相似度度量
vector<DMatch> matches;
matcher.match(obj_descriptors, scene_descriptors, matches);
Mat match_img;
drawMatches(obj, obj_keypoints, scene, scene_keypoints, matches, match_img);
imshow("滤除误匹配前", match_img);
}
//背景差分,读取当前摄像头的图像
void BackDiffTest()
{
// TODO: Add your control notification handler code here
//string videoFile = "F://program//Book//Chapter4//car.avi";
//string videoFile = "F:\\program\\Book\\Chapter4\\car.avi";
VideoCapture capture(0);
//capture.open(videoFile);
if (!capture.isOpened())
{
cout << "read video failure" << std::endl;
return;
}
BackgroundSubtractorMOG2 mog;
Mat foreground;
Mat background;
Mat frame;
long frameNo = 0;
while (capture.read(frame))
{
++frameNo;
//cout<<frameNo<<endl;
// 运动前景检测,并更新背景
mog(frame, foreground, 0.01);
// 腐蚀
erode(foreground, foreground, Mat());
// 膨胀
dilate(foreground, foreground, Mat());
mog.getBackgroundImage(background); // 返回当前背景图像
imshow("foreground", foreground);
imshow("background", background);
imshow("frame", frame);
if (waitKey(25) > 0)
{
break;
}
}
}
//混合高斯模型,读取视频文件,并提取背景
void MixedGaussianTest(string fn)
{
IplImage* pFrameOr; //当前帧
IplImage* pFrame; //当前帧
IplImage* pFrame33; //当前帧
IplImage* pFrame333; //当前帧
CvCapture* pCaptureOr;
CvCapture* pCapture;
CvCapture* pCapture1;
CvCapture* pCapture2;
int nFrmNum;
cvNamedWindow("AVIOriginal1", 0);
cvResizeWindow("AVIOriginal1", 340, 250);
cvMoveWindow("AVIOriginal1", 0, 0);
cvNamedWindow("AVIOriginal2", 0);
cvResizeWindow("AVIOriginal2", 330, 250);
cvMoveWindow("AVIOriginal2", 345, 0);
cvNamedWindow("AVIOriginal3", 0);
cvResizeWindow("AVIOriginal3", 330, 250);
cvMoveWindow("AVIOriginal3", 680, 0);
pCapture = cvCaptureFromFile(fn.c_str());
pCapture1 = cvCaptureFromFile(fn.c_str());
pCapture2 = cvCaptureFromFile(fn.c_str());
pFrame = cvQueryFrame(pCapture1);
//pFrame33=cvQueryFrame( pCapture1 );
//pFrame333=cvQueryFrame( pCapture1 );
pFrame33 = cvCloneImage(pFrame);
pFrame333 = cvCloneImage(pFrame);
float alpha = 10;
float beta = 15;
float gamma = 11;
float alphaR = 1;
float betaR = 1.7;
float gammaR = 1;
IplImage* img = NULL;
IplImage* img1 = NULL;
IplImage* pFramenum1 = NULL;//第一帧图像,不参与循环
IplImage* pFramenumImg1 = NULL;//第一帧灰度化后的图像,不参与循环
IplImage* pFramenumFrImg1 = NULL;//当前帧与第一帧差分并阈值化后的图像
CvMat* pFramenumMat1 = NULL;//第一帧矩阵,不参与循环
CvMat* pFramenumFr1 = NULL;//当前帧与第一帧差分后的矩阵
// IplImage* pFrame = NULL; //当前帧
IplImage* pFrImg = NULL; //当前帧灰度图
CvMat* pFrameMat = NULL;
CvMat* pFrMat = NULL;
// IplImage* pFrame33 = NULL; //当前帧
// IplImage* pFrame333 = NULL; //当前帧
IplImage* pFrame3 = NULL; //当前帧
IplImage* pFrame1 = NULL;//落后当前帧三帧的落后帧
IplImage* pFrImg1 = NULL; //差分后图像
CvMat* pFrameMat1 = NULL;
CvMat* pFrMat1 = NULL;
IplImage* pFrame2 = NULL;//超过当前帧三帧的超前帧
IplImage* pFrImg2 = NULL;
CvMat* pFrameMat2 = NULL;
CvMat* pFrMat2 = NULL;
CvMemStorage* storage = cvCreateMemStorage(0); //创建64K的动态内存块
CvSeq* contours = 0;
CvMemStorage* storage2 = cvCreateMemStorage(0); //创建64K的动态内存块
CvSeq* contours2 = 0;
int i, j;
CvScalar s0, s1;
CvSize size; //搜索时的邻域尺寸
size.width = 3;
size.height = 3;
CvTermCriteria criteria;
criteria.type = CV_TERMCRIT_ITER;
criteria.epsilon = 0.1; //结果的精确性
nFrmNum = 0;
while ((pFrame = cvQueryFrame(pCapture)) && (nFrmNum<250))
{
nFrmNum++;
// pFrameOr=cvCloneImage(pFrame);
pFrame1 = cvQueryFrame(pCapture1);
//如果是第一帧,需要申请内存,并初始化
if (nFrmNum == 1)
{
pFramenum1 = cvCloneImage(pFrame);
pFramenumImg1 = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U, 1);
pFramenumMat1 = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFramenumFr1 = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
cvCvtColor(pFramenum1, pFramenumImg1, CV_BGR2GRAY);
cvConvert(pFramenumImg1, pFramenumMat1);
pFrImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U, 1);
pFrMat = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrameMat = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrImg1 = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U, 1);
pFrMat1 = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrameMat1 = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrImg2 = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U, 1);
pFrMat2 = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrameMat2 = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
img = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U, 1);
//转化成单通道图像再处理
cvCvtColor(pFrame, pFrImg, CV_BGR2GRAY);
cvConvert(pFrImg, pFrameMat);
cvConvert(pFrImg, pFrMat);
for (i = 0; i<3; i++)
pFrame1 = cvQueryFrame(pCapture1);
}
else if (nFrmNum>7)
{
pFrame2 = cvQueryFrame(pCapture2);
pFrame3 = cvCloneImage(pFrame);
pFrame33 = cvCloneImage(pFrame);
pFrame333 = cvCloneImage(pFrame);
cvCvtColor(pFrame, pFrImg, CV_BGR2GRAY);
cvConvert(pFrImg, pFrameMat);
cvCvtColor(pFrame1, pFrImg1, CV_BGR2GRAY);
cvConvert(pFrImg1, pFrameMat1);
cvCvtColor(pFrame2, pFrImg2, CV_BGR2GRAY);
cvConvert(pFrImg2, pFrameMat2);
cvAbsDiff(pFrameMat, pFrameMat1, pFrMat1);//当前帧跟前面帧相减
cvAbsDiff(pFrameMat, pFrameMat2, pFrMat2);//当前帧与后面帧相减
cvAbsDiff(pFrameMat, pFramenumMat1, pFramenumFr1);//当前帧与第一帧相减
//二值化前景图
cvThreshold(pFrMat1, pFrImg1, 10, 255.0, CV_THRESH_BINARY);
cvThreshold(pFrMat2, pFrImg2, 10, 255.0, CV_THRESH_BINARY);
cvThreshold(pFramenumFr1, pFramenumImg1, 10, 255, CV_THRESH_BINARY);
//膨胀化前景图
cvDilate(pFrImg1, pFrImg1, NULL, 2);
cvDilate(pFrImg2, pFrImg2, NULL, 2);
//当前帧与前面帧相减后提取的轮廓线
cvFindContours(pFrImg1, storage, &contours, sizeof(CvContour), //寻找初始化轮廓并放置于序列中
CV_RETR_LIST, CV_LINK_RUNS);
for (; contours; contours = contours->h_next)
{
if (contours->total<200)
continue;
else break;
}
cvDrawContours(pFrame333, contours, CV_RGB(255, 255, 0), CV_RGB(0, 0, 0), 0, 2, 8);
//前差分图与后差分图相与,得到更准确的轮廓线
cvAnd(pFrImg1, pFrImg2, pFrImg1, NULL);
img1 = cvCloneImage(pFrImg);
cvFindContours(pFrImg1, storage, &contours, sizeof(CvContour), //寻找初始化轮廓并放置于序列中
CV_RETR_LIST, CV_LINK_RUNS);
for (; contours; contours = contours->h_next)
{
if (contours->total<200)
continue;
else break;
}
CvPoint* point = new CvPoint[contours->total]; //分配length个轮廓点
CvSeqReader reader;
CvPoint pt = cvPoint(0, 0); //pt.x=0,pt.y=0
cvStartReadSeq(contours, &reader); //初始化序列读取过程
for (i = 0; i < contours->total; i++)
{
CV_READ_SEQ_ELEM(pt, reader); //将由reader指定的元素复制到pt指定内存中,若reader指向的当前块到块尾,则转到下一块
point[i] = pt;//将pt所存元素移到point数组中
}
criteria.max_iter = 5; //最大迭代次数
cvSobel(pFrImg, pFrImg, 1, 1, 3);
cvSnakeImage(pFrImg, point, contours->total, &alpha, &beta, &gamma, CV_VALUE, size, criteria, 0);
for (i = 0; i<contours->total; i++)
{
j = (i + 1) % (contours->total);
cvLine(pFrame33, point[i], point[j], CV_RGB(255, 255, 0), 2, 8, 0);
}
//图像颠倒,使其反转
pFrImg->origin = 1;
pFrImg1->origin = 1;
pFrImg2->origin = 1;
img->origin = 1;
//显示图像
if (nFrmNum<59 || (nFrmNum>62 && nFrmNum<101) || nFrmNum>103)
{
// pFrame33=cvCloneImage(pFrame3);
// pFrame333=cvCloneImage(pFrame3);
// cvShowImage("AVIOriginal",pFrameOr);
cvShowImage("AVIOriginal1", pFrame333);
cvShowImage("AVIOriginal2", pFrame33);
cvShowImage("AVIOriginal3", pFrame);
}
if (cvWaitKey(10)>0) continue;
}
}
cvReleaseMemStorage(&storage);//释放内存块
cvReleaseMemStorage(&storage2);//释放内存块
//释放图像和矩阵
cvReleaseImage(&pFrImg);
cvReleaseImage(&pFrImg1);
cvReleaseImage(&pFrImg2);
cvReleaseMat(&pFrameMat);
cvReleaseMat(&pFrMat);
}
int main(int argc, char* argv[])
{
int mode = 1;
switch (mode)
{
case 1: SiftDemo("33.jpg", "3333.jpg"); break;
case 2: SurfDemo("33.jpg", "3333.jpg"); break;
case 3: OrbDemo("33.jpg", "3333.jpg"); break;
case 4: BackDiffTest(); break;
case 5: MixedGaussianTest("cat.avi");
}
//此函数等待按键,按键盘任意键就返回
waitKey();
return 0;
}
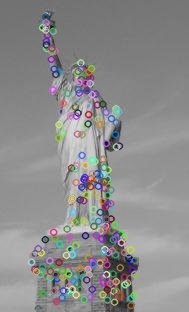
图片
原图像
结果图



























 1308
1308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











