







 从Apollo1.0的循迹功能到Apollo1.5的五大核心开放能力,包括障碍物感知、决策规划、云端仿真、高精地图服务及深度学习,百度的自动驾驶平台实现了从简单循迹到完整自动驾驶系统的跃进。
从Apollo1.0的循迹功能到Apollo1.5的五大核心开放能力,包括障碍物感知、决策规划、云端仿真、高精地图服务及深度学习,百度的自动驾驶平台实现了从简单循迹到完整自动驾驶系统的跃进。

原文:https://zhuanlan.zhihu.com/p/29721690
本文是自我学习过程记录,感谢李科男大神分享.
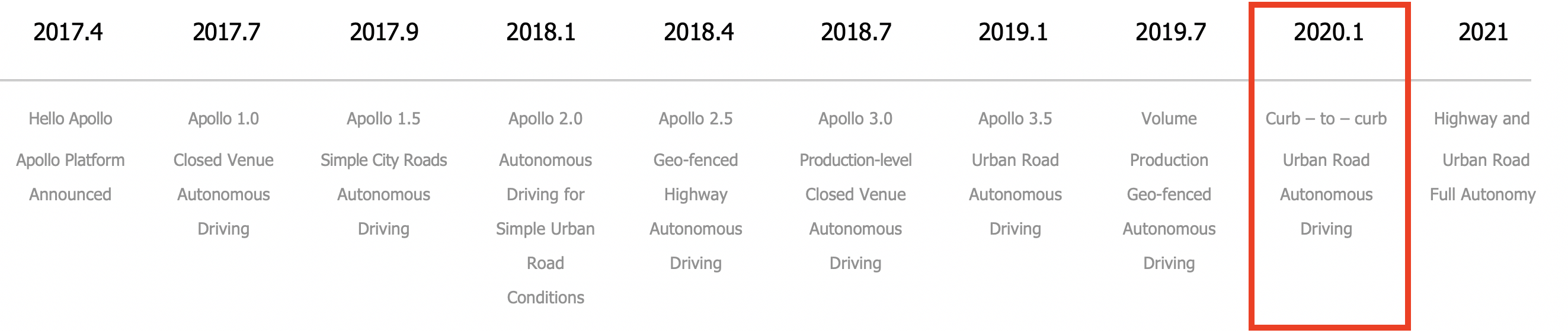
17年7月5号
陆奇在『百度AI开发者大会』上宣布开源apollo1.0,当时只有完事的框架和自定位、控制等各循迹的功能。
阿波罗1.0:
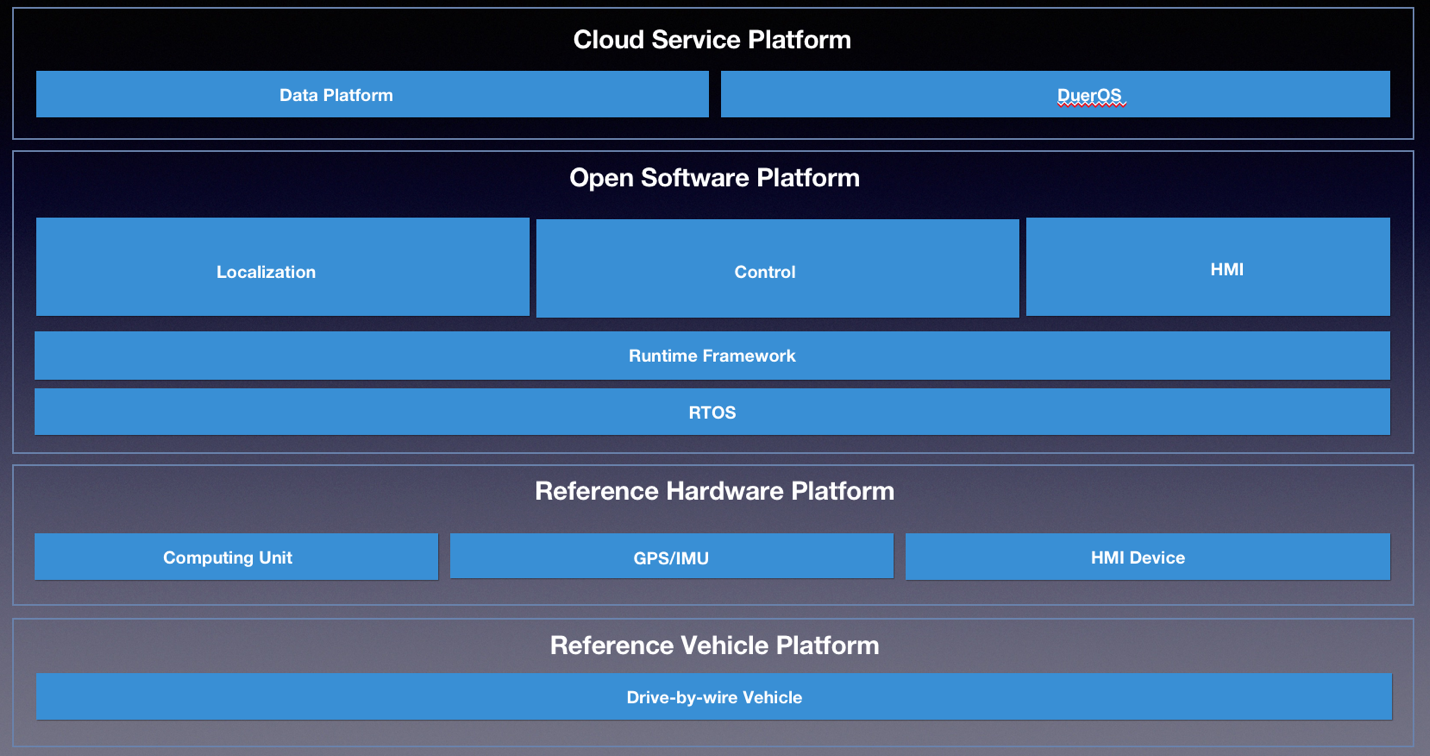
Apollo 1.0(也称为自动GPS航点跟踪)可在封闭的场地(例如测试跑道或停车场)中工作。必须进行此安装,以确保Apollo与您的车辆完美配合。下图列出了Apollo 1.0中的各个模块。
对于设置:
-
硬件:
工业PC(IPC)
全球定位系统(GPS)
惯性测量单元(IMU)
控制器局域网(CAN)卡
硬盘
GPS天线
GPS接收器
-
软件:
- Apollo Linux内核(基于Linux内核4.4.32)
17年9月20日
“Apollo Meetup”Apollo1.5开放技术发布会上,智能驾驶事业群组总经理李震宇宣布Apollo1.5正式对业界开放,包含障碍物感知、决策规划、云端仿真、高精地图服务、端到端的深度学习(End-to-End)等五大核心开放能力,并支持昼夜定车道自动驾驶。
阿波罗1.5:
Apollo 1.5适用于固定车道巡航。通过添加LiDAR,具有该版本的车辆现在可以更好地感知周围环境,并且可以更好地绘制其当前位置并规划其轨迹,从而在车道上进行更安全的操纵。请注意,以黄色突出显示的模块是1.5版的添加或升级。

- 1.0版中提到的所有要求
硬件:
测光测距系统(LiDAR)
华硕GTX1080 GPU-A8G-游戏GPU卡
软件:
- Nvidia GPU驱动程序
对应的技术介绍
障碍物感知和决策规划能力:基于障碍物感知和决策规划能力,车辆能够实现不分昼夜的精准障碍物识别,通过深度神经网络精准预测行驶路径,并最终做出最优的驾驶决策。
云端仿真:Apollo仿真平台是业内唯一开放的、内置高精地图的、为自动驾驶量身打造的仿真平台。它拥有海量真实的中国交通场景数据,基于大规模云端计算容量,能够打造日行百万公里的虚拟运行能力。
高精地图服务:Apollo高精地图则被称为“最懂自动驾驶”的高精地图,是自动驾驶的基础,具备精细化程度最高、生产效率最高、覆盖面最广的优势。
端到端的深度学习(End-to-End):计划于年底开放的端到端的深度学习,在当天宣布提前开放,跑赢时间表。
如果说Apollo1.0只是一个比较简单笨拙的循迹的话,Apollo1.5相对来说就可以说是一个完整的包含感知、预测、决策、规划自动驾系统了。
Apollo生态圈

Apollo 基金「双百计划」,早在 7 月 5 日,百度 AI 开发者大会上,百度宣布与长江产业基金会成立 Apollo 基金。目前,Apollo 基金首期 20 亿资金已到位,已完成多起投资。未来三年,Apollo 基金生态将投资 100 亿,同时实现 100+个项目的投资。
独一无二的自动驾驶数据标注服务,Apollo 平台提供数据标注服务,将大大提升研发效率,支持自动驾驶车 2D、3D、高精地图等 20+种标注场景,为百度无人车及行业知名客户提供数据标注服务。
Udacity 成为 Apollo 合作伙伴:双方将联合开发课程,举办竞赛,选拔优秀人才。
Apollo&ROS:双方将推动 ROS community 和 Apollo 生态的深入合作。
百度携手 CSDN 和极客邦共建开发者社区,举办技术沙龙、制作自动驾驶公开课,早期众测 Apollo 开放代码等等。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











