










基础知识
两向量的X乘p1(x1,y1),p2(x2,y2)
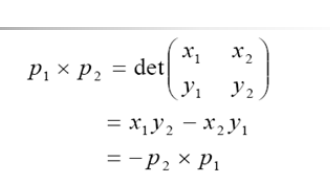
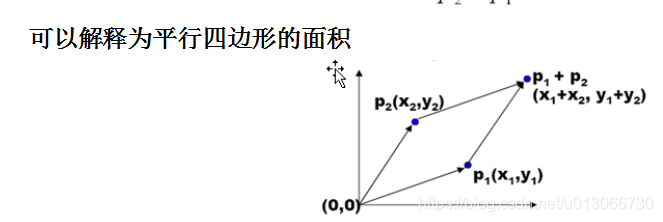
p1Xp2如果小于零则说明 p1在p2的逆时针方向
如果大于零则说明 p1在p2的顺时针方向
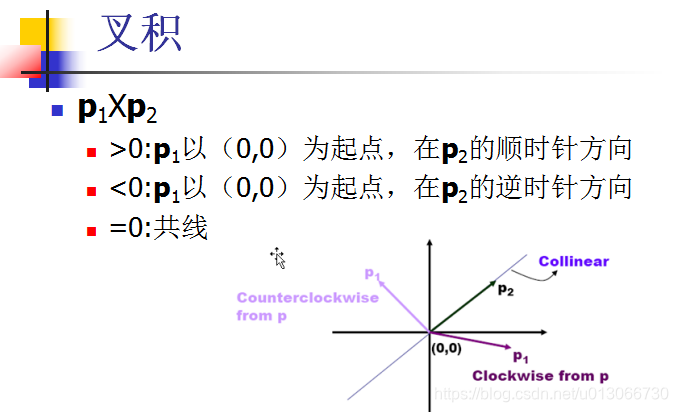
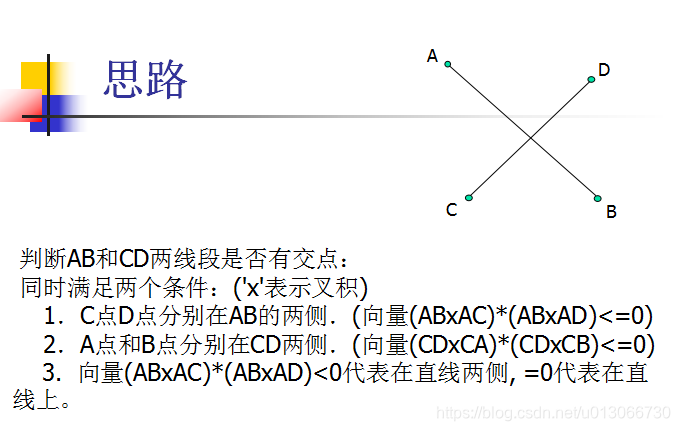
这个方法很有用处。比如判断一个点是否在一条线段的左边还是右边,可以用X乘来判断,或者判断两条线段是否相交
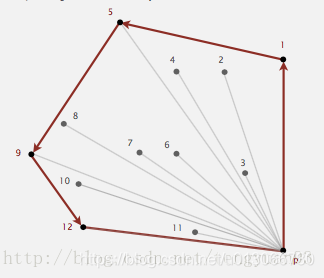
凸包算法
其实很简单,就是用一个的凸多边形围住所有的点。就好像桌面上有许多图钉,用一根紧绷的橡皮筋将它们全部围起来一样。算法详细步骤:
1. 找到所有点中纵坐标y最小的点,也就是这些点中最下面的点,记为p0。
2. 然后计算其余点与该点的连线与x轴之间夹角的余弦值,将这些点按其对于最低点的正弦值从大到小排序,排序好的点记为p1, p2, p3, ......
3. 将最低点p0和排序好的点中的第一个点p1压入栈中,然后从p2开始计算,计算栈顶两个点与该点三点向量是否是逆时针转动,若是,则将该点压入栈中;若否,则将栈顶元素推出,此时再选取栈顶2个元素与当前点进行比较,如果为逆时针转动,压入栈中,如果否,则将栈顶元素推出。如此往复。(此处对栈的概念不清楚可自行搜索)
这里不妨举个例子:
栈中[p0,p1],p2与栈中的[p0,p1]进行比较,即查看p0p1,p1p2这两条向量的叉乘,发现大于0也就是逆时针,那么将p2压入栈中得到[p0,p1,p2]。
将p3与栈顶2个元素比较,即p3与p1、p2进行比较,即查看p1p2,p2p3这两条向量的叉乘,发现大于0也就是逆时针,那么将p3压入栈中得到[p0,p1,p2,p3]。
将p4与栈顶2个元素比较,即p4与p2、p3进行比较,即查看p2p3,p3p4这两条向量的叉乘,发现小于0也就是顺时针,那么删除栈顶元素p3,得到新栈[p0,p1,p2];将p4与新栈的2个栈顶元素比较,即查看p1p2,p2p4这两条向量的叉乘,发现小于0也就是顺时针,删除栈顶元素p2,得到新栈[p0,p1];将p4与新栈的2个元素比较,即查看p0p1,p1p4这两条向量的叉乘,发现大于0也就是逆时针,将p4插入栈中,得到新栈[p0,p1,p4]。
将p5与栈顶2个元素比较,即p5与p1、p4进行比较,即查看p1p4,p4p5这两条向量的叉乘,发现小于0也就是顺时针,那么删除栈顶元素p4,得到新栈[p0,p1];将p5与新栈的2个栈顶元素进行比较,发现大于0也就是逆时针,那么即将p5压入栈中,得到新栈[p0,p1,p5]。
如此往复,知道所有点都被处理结束。
4. 最后栈里面元素就是所有的凸包外围的点
判断是否为逆时针旋转
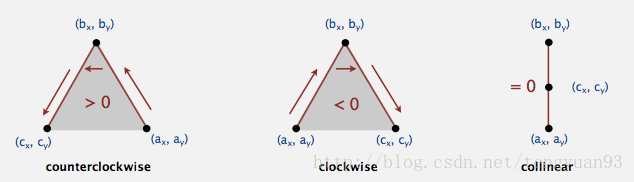
area = (b.x-a.x) * (c.y-a.y) - (b.y-a.y) * (c.x-a.x)
area >0,A-B-C逆时针旋转;
area <0,A-B-C顺时针旋转;
area =0,A-B-C在一条直线上。
来看看c++代码
class mpoint{ //class point(x, y)
public:
double x;
double y;
mpoint(double xx = 0, double yy = 0){
x = xx;
y = yy;
}
};
int get_miny_point_id(mpoint *points, int size){ //get the point with min_y
int i, min_id = 0;
double miny = 10000;
for(i = 0; i < size; i++){
if(points[i].y < miny){
miny = points[i].y;
min_id = i;
}
}
return min_id;
}
void get_cos(mpoint *points, double *mcos, int id, int size){ //get point's cos
int i;
double coss;
for(i = 0; i < size; i++){
if(i == id){
mcos[i] = 2;
}
else{
coss = (points[i].x - points[id].x) / sqrt((points[i].x - points[id].x) * (points[i].x - points[id].x) + (points[i].y - points[id].y) * (points[i].y - points[id].y));
mcos[i] = coss;
}
}
}
void sort_points(mpoint *points, double *mcos, int size){ //sort the points
int i, j;
double temp_cos;
mpoint temp_point;
for(i = 0; i < size; i++){
for(j = 0; j < size - i - 1; j++){ //bubble sorting
if(mcos[j] < mcos[j + 1]){
temp_cos = mcos[j];
mcos[j] = mcos[j + 1];
mcos[j + 1] = temp_cos;
temp_point = points[j];
points[j] = points[j + 1];
points[j + 1] = temp_point;
}
}
}
}
int ccw(mpoint a, mpoint b, mpoint c){ //judge if it is couter-colockwise
double area2 = (b.x-a.x) * (c.y-a.y) - (b.y-a.y) * (c.x-a.x);
if (area2 < 0){
return -1; // clockwise
}
else{
if (area2 > 0) return 1; // counter-clockwise
else return 0; // collinear
}
}
void get_outpoint(mpoint *points, int size){ //get points in stack
int i, k;
vector <mpoint>outpoint;
outpoint.push_back(points[0]);
outpoint.push_back(points[1]);
i = 2;
while(true){
if(i == size){
break;
}
if(ccw(outpoint[outpoint.size() - 2], outpoint[outpoint.size() - 1], points[i]) > 0){
outpoint.push_back(points[i]);
i = i + 1;
}
else{
outpoint.pop_back();
}
}
cout << "The outpoints are: " << endl;
for(k = 0; k < outpoint.size(); k++){
cout << outpoint[k].x << " " << outpoint[k].y << endl;
}
}这里主要介绍算法,就没有写栈,用一个vector代替了栈,意思相同。
运行一下:
#include <iostream>
#include <vector>
#include <math.h>
using namespace std;
int main()
{
int i, size = 4;
double px, py;
cout << "Please input the size: ";
cin >> size;
mpoint *points;
int miny_point_id;
double *mcos;
points = new mpoint[size];
mcos = new double[size];
for(i = 0; i < size; i++){
cin >> px;
cin >> py;
points[i].x = px;
points[i].y = py;
}
miny_point_id = get_miny_point_id(points, size);
get_cos(points, mcos, miny_point_id, size);
sort_points(points, mcos, size);
get_outpoint(points, size);
}输入:
Please input the size: 8
1 0
0 1
0 -1
-1 0
2 0
0 2
0 -2
-2 0
输出:(凸包顶点坐标)
0 -2
2 0
0 2
-2 0
总结
在图形学中,凸包是一个非常重要的概念。简明的说,在平面中给出N个点,找出一个由其中某些点作为顶点组成的凸多边形,恰好能围住所有的N个点。该凸包算法又叫Graham Scan法。点排序时间复杂度O(nlogn), 检查每个点O(n), 综合时间复杂度O(nlogn).

















 4351
4351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









