







与霍夫直线变换的关系
书接上回【图像处理】(2.1)霍夫直线变换_mjiansun的博客-CSDN博客_hough变换检测直线的步骤,
基础知识:直线公式y=kx+b,圆的公式为(x-a)**2 + (y-b)**2 = r**2。
依据霍夫直线变换的方法,欧式空间中的一个点(x,y)点代表霍夫空间(p,theta)中的一条曲线,多个点就对应多条曲线,这些曲线的交点就能对应欧式空间的一条直线。
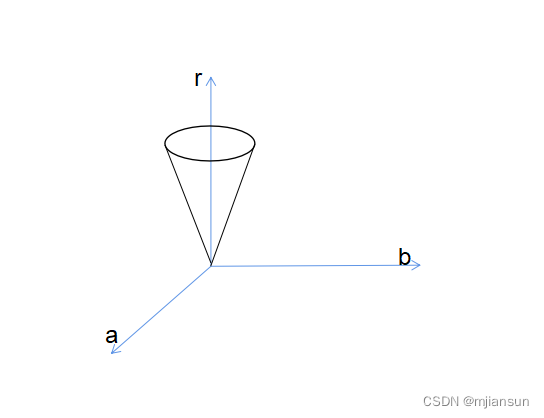
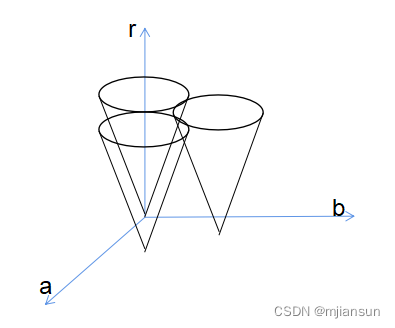
依据上述想法,欧式空间中的圆(x-a)**2 + (y-b)**2 = r**2中的一个点(x,y)对应的(a,b,r)一个圆锥面,这个圆锥面一下不好理解,可以先将(x,y)都变成(0,0)然后公式变为a**2+b**2=r**2,那么此时该公式正好对应下图中的圆锥面,不包含圆锥底面内部内容,只是所有的边。欧式空间的多个点,相当于霍夫空间中的多个圆锥面,这些圆锥体表面的交点就是候选圆心(后续一般会设定一定方法过滤掉不合理的圆心)。
简单思路
上面的基础方法有了,那么能不能这么去操作呢,实际情况是不行,因为需要的计算量太大了,不太适合使用。因此需要去找一些加速的方法,能够减少计算的复杂度和空间复杂度。因此这里借鉴的opencv的想法以及B站博主3.2 hough circle(霍夫圆变换)_哔哩哔哩_bilibili的讲解,我在下面将介绍这种加速求解的方法。下面先简单介绍思路:
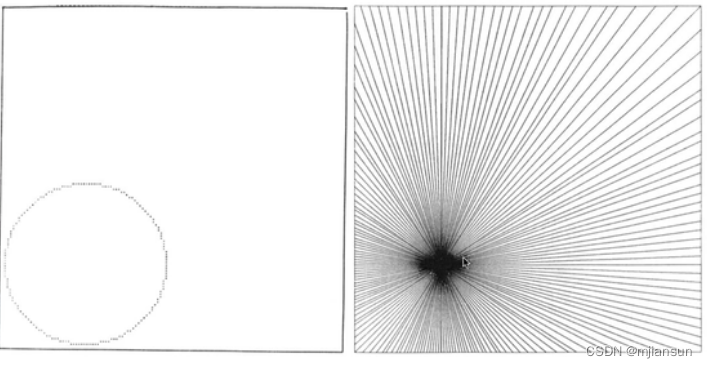
1、圆梯度方向的垂线
2、垂线交点较多的地方就是圆心
3、有了圆心后,每一个圆心点是具体值,欧式空间的(x,y)也是具体值,那么可以计算出r,看r分布在哪个区间内,属于那个区间就在那个区间加1,具体如下图所示,统计数较多的值可能就是圆心
上述思路扩展到具体细节
1、图像灰度化
2、高斯模糊
3、canny算子找边缘edge
4、针对上述结果再使用sobel算子求x和y方向的梯度edge_x和edge_y
sobel_kernel_y = np.array([[-1.0, -2.0, -1.0], [0.0, 0.0, 0.0], [1.0, 2.0, 1.0]])
sobel_kernel_x = np.array([[-1.0, 0.0, 1.0], [-2.0, 0.0, 2.0], [-1.0, 0.0, 1.0]])
edge_x = convolve(sobel_kernel_x,edge,[1,1,1,1],[1,1])
edge_y = convolve(sobel_kernel_y,edge,[1,1,1,1],[1,1])5、 遍历边缘edge图(是步骤3处理后得到的图)每一个点,首先排除edge中为0的点,再排除x和y方向梯度同时为0的点,在该点梯度的垂线上的点是可能圆心候选点。
下面的center_accumulator其实就是对是垂线上点进行统计数加1。
for i in range(edge.shape[0]):
for j in range(edge.shape[1]):
if not edge[i,j] == 0:
dx_neibor = edge_x_pad[i:i+3,j:j+3]
dy_neibor = edge_y_pad[i:i+3,j:j+3]
dx = (dx_neibor*Gaussian_filter_3).sum()
dy = (dy_neibor*Gaussian_filter_3).sum() #这里感觉在做梯度平滑
if not (dx == 0 and dy == 0):
t1 = (k/center_axis_scale-i)
t2 = (l/center_axis_scale-j)
t3 = t1**2 + t2**2
temp = (t3 > minRad_square)&(t3 < maxRad_square)&(np.abs(dx*t1-dy*t2) < 1e-4) # 相似三角形,dx/dy = t2/t1,在这条直线上的点才是可能的圆心点
center_accumulator[temp] += 1
points[0].append(i)
points[1].append(j)6、圆心点的非极大值抑制
# 非极大值抑制
M = center_accumulator.mean()
for i in range(center_accumulator.shape[0]):
for j in range(center_accumulator.shape[1]):
neibor = \
center_accumulator[max(0, i - halfWindow + 1):min(i + halfWindow, center_accumulator.shape[0]),
max(0, j - halfWindow + 1):min(j + halfWindow, center_accumulator.shape[1])]
if not (center_accumulator[i,j] >= neibor).all():
center_accumulator[i,j] = 07、阈值化
下面是设定大于均值的1.5倍才可能是圆心,为了缩减候选圆心的个数,减少计算量。
center_threshold = M * center_threhold_factor
possible_centers = np.array(np.where(center_accumulator > center_threshold)) # 阈值化8、 构建圆心点和半径的投票矩阵
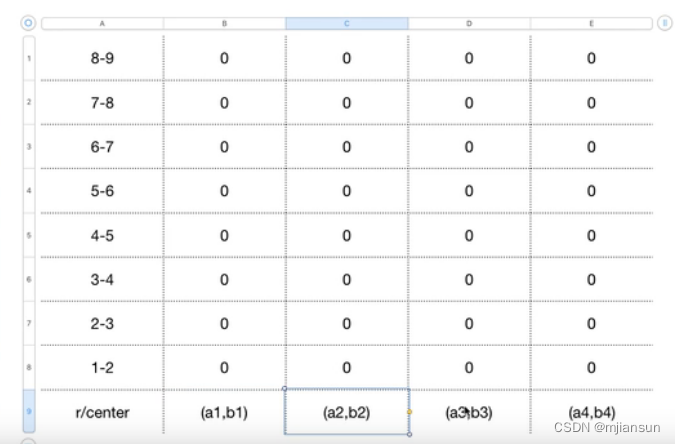
就上图一样,因为根据之前的那些步骤已经得到候选圆心点了,只需要算r,然后统计数量。数量越大越可能为圆心。
9、增加限制条件得出输出的圆
设置最大检测圆的个数;
删除距离太近的圆心,保留投票数多的圆心;
要想认为是圆心,那么你圆边上的点得足够多,不然这个圆不是特别可信。
完整代码
#coding:utf-8
import numpy as np
import matplotlib.pyplot as plt
import os
import cv2
def convolve(filter,mat,padding,strides):
'''
:param filter:卷积核,必须为二维(2 x 1也算二维) 否则返回None
:param mat:图片
:param padding:对齐
:param strides:移动步长
:return:返回卷积后的图片。(灰度图,彩图都适用)
@author:bilibili-会飞的吴克
'''
result = None
filter_size = filter.shape
mat_size = mat.shape
if len(filter_size) == 2:
if len(mat_size) == 3:
channel = []
for i in range(mat_size[-1]):
pad_mat = np.pad(mat[:,:,i], ((padding[0], padding[1]), (padding[2], padding[3])), 'constant')
temp = []
for j in range(0,mat_size[0],strides[1]):
temp.append([])
for k in range(0,mat_size[1],strides[0]):
val = (filter*pad_mat[j:j+filter_size[0],k:k+filter_size[1]]).sum()
temp[-1].append(val)
channel.append(np.array(temp))
channel = tuple(channel)
result = np.dstack(channel)
elif len(mat_size) == 2:
channel = []
pad_mat = np.pad(mat, ((padding[0], padding[1]), (padding[2], padding[3])), 'constant')
for j in range(0, mat_size[0], strides[1]):
channel.append([])
for k in range(0, mat_size[1], strides[0]):
val = (filter * pad_mat[j:j + filter_size[0],k:k + filter_size[1]]).sum()
channel[-1].append(val)
result = np.array(channel)
return result
def AHTforCircles(edge,center_threhold_factor = None,score_threhold = None,min_center_dist = None,minRad = None,maxRad = None,center_axis_scale = None,radius_scale = None,halfWindow = None,max_circle_num = None):
if center_threhold_factor == None:
center_threhold_factor = 10.0
if score_threhold == None:
score_threhold = 15.0
if min_center_dist == None:
min_center_dist = 80.0
if minRad == None:
minRad = 0.0
if maxRad == None:
maxRad = 1e7*1.0
if center_axis_scale == None:
center_axis_scale = 1.0
if radius_scale == None:
radius_scale = 1.0
if halfWindow == None:
halfWindow = 2
if max_circle_num == None:
max_circle_num = 6
min_center_dist_square = min_center_dist**2
sobel_kernel_y = np.array([[-1.0, -2.0, -1.0], [0.0, 0.0, 0.0], [1.0, 2.0, 1.0]])
sobel_kernel_x = np.array([[-1.0, 0.0, 1.0], [-2.0, 0.0, 2.0], [-1.0, 0.0, 1.0]])
edge_x = convolve(sobel_kernel_x,edge,[1,1,1,1],[1,1])
edge_y = convolve(sobel_kernel_y,edge,[1,1,1,1],[1,1])
center_accumulator = np.zeros((int(np.ceil(center_axis_scale*edge.shape[0])),int(np.ceil(center_axis_scale*edge.shape[1]))))
k = np.array([[r for c in range(center_accumulator.shape[1])] for r in range(center_accumulator.shape[0])])
l = np.array([[c for c in range(center_accumulator.shape[1])] for r in range(center_accumulator.shape[0])])
minRad_square = minRad**2
maxRad_square = maxRad**2
points = [[],[]]
edge_x_pad = np.pad(edge_x,((1,1),(1,1)),'constant')
edge_y_pad = np.pad(edge_y,((1,1),(1,1)),'constant')
Gaussian_filter_3 = 1.0 / 16 * np.array([(1.0, 2.0, 1.0), (2.0, 4.0, 2.0), (1.0, 2.0, 1.0)])
for i in range(edge.shape[0]):
for j in range(edge.shape[1]):
if not edge[i,j] == 0:
dx_neibor = edge_x_pad[i:i+3,j:j+3]
dy_neibor = edge_y_pad[i:i+3,j:j+3]
dx = (dx_neibor*Gaussian_filter_3).sum()
dy = (dy_neibor*Gaussian_filter_3).sum()
if not (dx == 0 and dy == 0):
t1 = (k/center_axis_scale-i)
t2 = (l/center_axis_scale-j)
t3 = t1**2 + t2**2
temp = (t3 > minRad_square)&(t3 < maxRad_square)&(np.abs(dx*t1-dy*t2) < 1e-4) # 相似三角形,dx/dy = t2/t1,在这条直线上的点才是可能的圆心点
center_accumulator[temp] += 1
points[0].append(i)
points[1].append(j)
# 非极大值抑制
M = center_accumulator.mean()
for i in range(center_accumulator.shape[0]):
for j in range(center_accumulator.shape[1]):
neibor = \
center_accumulator[max(0, i - halfWindow + 1):min(i + halfWindow, center_accumulator.shape[0]),
max(0, j - halfWindow + 1):min(j + halfWindow, center_accumulator.shape[1])]
if not (center_accumulator[i,j] >= neibor).all():
center_accumulator[i,j] = 0
# 非极大值抑制
plt.imshow(center_accumulator,cmap='gray')
plt.axis('off')
plt.show()
center_threshold = M * center_threhold_factor
possible_centers = np.array(np.where(center_accumulator > center_threshold)) # 阈值化
sort_centers = []
for i in range(possible_centers.shape[1]):
sort_centers.append([])
sort_centers[-1].append(possible_centers[0,i])
sort_centers[-1].append(possible_centers[1, i])
sort_centers[-1].append(center_accumulator[sort_centers[-1][0],sort_centers[-1][1]])
sort_centers.sort(key=lambda x:x[2],reverse=True)
centers = [[],[],[]]
points = np.array(points)
for i in range(len(sort_centers)):
radius_accumulator = np.zeros(
(int(np.ceil(radius_scale * min(maxRad, np.sqrt(edge.shape[0] ** 2 + edge.shape[1] ** 2)) + 1))),dtype=np.float32)
if not len(centers[0]) < max_circle_num:#最多检测max_circle_num个圆
break
iscenter = True
for j in range(len(centers[0])):#删除较近圆心的点
d1 = sort_centers[i][0]/center_axis_scale - centers[0][j]
d2 = sort_centers[i][1]/center_axis_scale - centers[1][j]
if d1**2 + d2**2 < min_center_dist_square:
iscenter = False
break
if not iscenter:
continue
temp = np.sqrt((points[0,:] - sort_centers[i][0] / center_axis_scale) ** 2 + (points[1,:] - sort_centers[i][1] / center_axis_scale) ** 2)
temp2 = (temp > minRad) & (temp < maxRad)
temp = (np.round(radius_scale * temp)).astype(np.int32)
for j in range(temp.shape[0]):
if temp2[j]:
radius_accumulator[temp[j]] += 1
for j in range(radius_accumulator.shape[0]):
if j == 0 or j == 1:
continue
if not radius_accumulator[j] == 0:
radius_accumulator[j] = radius_accumulator[j]*radius_scale/np.log(j) #radius_accumulator[j]*radius_scale/j
score_i = radius_accumulator.argmax(axis=-1)
if radius_accumulator[score_i] < score_threhold:
iscenter = False
if iscenter:
centers[0].append(sort_centers[i][0]/center_axis_scale)
centers[1].append(sort_centers[i][1]/center_axis_scale)
centers[2].append(score_i/radius_scale)
centers = np.array(centers)
centers = centers.astype(np.float64)
return centers
def drawCircles(circles,edge,color = (0,0,255),err = 600):
if len(edge.shape) == 2:
result = np.dstack((edge,edge,edge))
else:
result = edge
for i in range(edge.shape[0]):
for j in range(edge.shape[1]):
dist_square = (circles[0]-i)**2 + (circles[1]-j)**2
e = np.abs(circles[2]**2 - dist_square)
if (e < err).any():
result[i,j] = color
if (dist_square < 25.0).any():
result[i,j] = (255,0,0)
return result
if __name__=='__main__':
pic_path = './HoughCircleImg/'
pics = os.listdir(pic_path)
params = {
'1.jpeg':{
'center_threhold_factor': 3.33,
'score_threhold':15.0,
'min_center_dist':80.0,
'minRad':0.0,
'maxRad':1e7*1.0,
'center_axis_scale':1.0,
'radius_scale':1.0,
'halfWindow':2,
'max_circle_num':1
},
'4.jpg':{
'center_threhold_factor': 2.0,
'score_threhold': 15.0,
'min_center_dist': 80.0,
'minRad': 0.0,
'maxRad': 1e7 * 1.0,
'center_axis_scale': 1.0,
'radius_scale': 1.0,
'halfWindow': 2,
'max_circle_num': 6
},
'2.jpeg':{
'center_threhold_factor': 3.33,
'score_threhold': 50.0,
'min_center_dist': 80.0,
'minRad': 0.0,
'maxRad': 1e7 * 1.0,
'center_axis_scale': 0.9,
'radius_scale': 1.0,
'halfWindow': 2,
'max_circle_num': 1
},
'3.jpeg':{
'center_threhold_factor': 1.5,
'score_threhold': 56.0,
'min_center_dist': 80.0,
'minRad': 0.0,
'maxRad': 1e7 * 1.0,
'center_axis_scale': 0.8,
'radius_scale': 1.0,
'halfWindow': 2,
'max_circle_num': 1
},
'0.jpg':{
'center_threhold_factor': 1.5,
'score_threhold': 30.0,
'min_center_dist': 80.0,
'minRad': 0.0,
'maxRad': 1e7 * 1.0,
'center_axis_scale': 1.0,
'radius_scale': 1.0,
'halfWindow': 2,
'max_circle_num': 1
}
}
for i in pics:
if i[-5:] == '.jpeg' or i[-4:] == '.jpg':
img = plt.imread(pic_path+i)
blurred = cv2.GaussianBlur(img, (3, 3), 0)
plt.imshow(blurred)
plt.axis('off')
plt.show()
if not len(blurred.shape) == 2:
gray = cv2.cvtColor(blurred, cv2.COLOR_RGB2GRAY)
else:
gray = blurred
edge = cv2.Canny(gray, 50, 150) # 二值图 (0 或 255) 得到 canny边缘检测的结果
plt.imshow(edge)
plt.axis('off')
plt.show()
circles = AHTforCircles(edge,
center_threhold_factor=params[i]['center_threhold_factor'],score_threhold=params[i]['score_threhold'],min_center_dist=params[i]['min_center_dist'],minRad=params[i]['minRad'],
maxRad=params[i]['maxRad'],center_axis_scale=params[i]['center_axis_scale'],radius_scale=params[i]['radius_scale'],
halfWindow=params[i]['halfWindow'],max_circle_num=params[i]['max_circle_num'])
final_img = drawCircles(circles,blurred)
plt.imshow(final_img)
plt.axis('off')
plt.show()















 777
777











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









