









纠结了一下午的kinect初尝试,算是有一点小成果了,觉得这方面资料比较少,打算写一下总结。
前期准备
1.先安装Kinect的SDK,这里采用的是SDK1.8(虽然都17年了,但是老设备还是得装1.8)之前装2.0引起了插入Kinect一直闪烁无法装驱动的问题。
2.装好SDK后可以看看里面的小示例啦,然后就是安装opencv,这里选的是3.0,然后配置一些环境变量

3.安装好opencv后可以建一个控制台程序测试一下,记得导入一下opencv的库
int main()
{
IplImage * test;
test = cvLoadImage("./1.jpg");//图片路径
cvNamedWindow("test_demo", 1);
cvShowImage("test_demo", test);
cvWaitKey(0);
cvDestroyWindow("test_demo");
cvReleaseImage(&test);
return 0;
}开始一步步写MFC啦
1.创建一个mfc工程,创建步骤不细说了,参考
http://blog.csdn.net/sxlsxl119/article/details/51258998
先实现打开图片,写一个button处理函数如下所示。导入cvvImage类看上述文章教程
void CopentestDlg::OnBnClickedButton1()
{
flag = false;
// TODO: 在此添加控件通知处理程序代码
AfxMessageBox(_T("点击了打开图片!"));
IplImage *image = NULL; //原始图像
if (image) cvReleaseImage(&image);
image = cvLoadImage("./1.jpg", 1); //显示图片
DrawPicToHDC(image, IDC_STATIC);
}效果大概是这样的

2.再参考
http://blog.csdn.net/kh1445291129/article/details/50778913
实现一下电脑自带视频流的捕捉。注意这里在初始化函数OnInitDialog()添加了一部分代码用来隐藏事先创建好的视频框,在那个位置打开opencv的视频框如下:
// TODO: 在此添加额外的初始化代码
cvNamedWindow("view", CV_WINDOW_AUTOSIZE);
HWND hWnd = (HWND)cvGetWindowHandle("view");
HWND hParent = ::GetParent(hWnd);
::SetParent(hWnd, GetDlgItem(IDC_STATIC)->m_hWnd);
::ShowWindow(hParent, SW_HIDE);//隐藏父窗口
flag = 1;
kinectable = false;
return TRUE; // 除非将焦点设置到控件,否则返回 TRUE写一个button处理函数打开摄像头如下
void CopentestDlg::OnBnClickedButton2()
{
// 点击打开电脑自带摄像头
AfxMessageBox(_T("将打开摄像头"));
flag = true;
CRect rect;
CWnd *pWnd = GetDlgItem(IDC_STATIC);
pWnd->GetClientRect(&rect); //获取控件大小
int x = rect.Width();
int y = rect.Height();
cv::VideoCapture capture(0);
while (flag) {
cv::Mat frame;
capture >> frame;
cv::Mat dst;
cv::resize(frame, dst, cv::Size(x, y), 0, 0, 1);
cv::imshow("view", dst);
cv::waitKey(30);
}
}
- 最后参考
http://blog.csdn.net/zouxy09/article/details/8146266
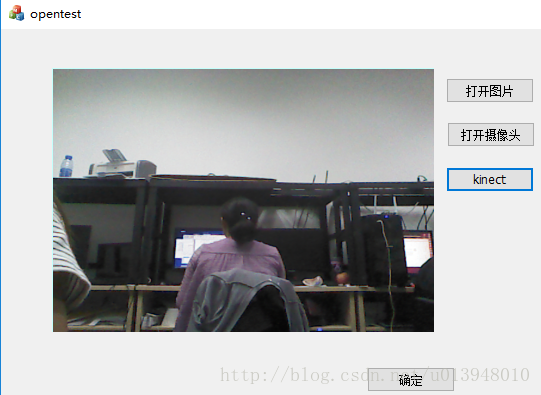
写一个button用来打开kinect,在这个基础上做了一些微小的改进,结合第2步的隐藏设置,直接可以在显示图片的框里显示kinect捕捉的2D视频,上面的连接里面对函数有非常详细的解释
注意在工程中要引入Kinect的库文件
附加依赖:
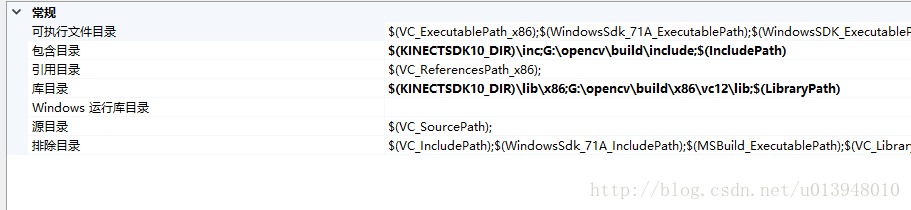
opencv_ts300.lib
opencv_world300.lib
kernel32.lib
user32.lib
winspool.lib
comdlg32.lib
advapi32.lib
shell32.lib
ole32.lib
oleaut32.lib
uuid.lib
odbc32.lib
odbccp32.lib
Kinect10.lib
void CopentestDlg::OnBnClickedButton3()
{
// TODO: 在此添加控件通知处理程序代码
kinectable = true;
cv::Mat image;
image.create(480, 640, CV_8UC3);
//1、初始化NUI
HRESULT hr = NuiInitialize(NUI_INITIALIZE_FLAG_USES_COLOR);
if (FAILED(hr))
{
AfxMessageBox(_T("打开kinect失败"));
return ;
}
AfxMessageBox(_T("打开kinect成功"));
//2、定义事件句柄
//创建读取下一帧的信号事件句柄,控制KINECT是否可以开始读取下一帧数据
HANDLE nextColorFrameEvent = CreateEvent(NULL, TRUE, FALSE, NULL);
HANDLE colorStreamHandle = NULL; //保存图像数据流的句柄,用以提取数据
//3、打开KINECT设备的彩色图信息通道,并用colorStreamHandle保存该流的句柄,以便于以后读取
hr = NuiImageStreamOpen(NUI_IMAGE_TYPE_COLOR, NUI_IMAGE_RESOLUTION_640x480,
0, 2, nextColorFrameEvent, &colorStreamHandle);
if (FAILED(hr))//判断是否提取正确
{
AfxMessageBox(_T("读取错误"));
NuiShutdown();
return ;
}
//cv::namedWindow("colorImage", CV_WINDOW_AUTOSIZE);
CRect rect;
CWnd *pWnd = GetDlgItem(IDC_STATIC);
pWnd->GetClientRect(&rect); //获取控件大小
int x = rect.Width();
int y = rect.Height();
//4、开始读取彩色图数据
while (kinectable)
{
const NUI_IMAGE_FRAME * pImageFrame = NULL;
//4.1、无限等待新的数据,等到后返回
if (WaitForSingleObject(nextColorFrameEvent, INFINITE) == 0)
{
//4.2、从刚才打开数据流的流句柄中得到该帧数据,读取到的数据地址存于pImageFrame
hr = NuiImageStreamGetNextFrame(colorStreamHandle, 0, &pImageFrame);
if (FAILED(hr))
{
AfxMessageBox(_T("不能获取彩色图像"));
NuiShutdown();
return;
}
INuiFrameTexture * pTexture = pImageFrame->pFrameTexture;
NUI_LOCKED_RECT LockedRect;
//4.3、提取数据帧到LockedRect,它包括两个数据对象:pitch每行字节数,pBits第一个字节地址
//并锁定数据,这样当我们读数据的时候,kinect就不会去修改它
pTexture->LockRect(0, &LockedRect, NULL, 0);
//4.4、确认获得的数据是否有效
if (LockedRect.Pitch != 0)
{
//4.5、将数据转换为OpenCV的Mat格式
for (int i = 0; i<image.rows; i++)
{
uchar *ptr = image.ptr<uchar>(i); //第i行的指针
//每个字节代表一个颜色信息,直接使用uchar
uchar *pBuffer = (uchar*)(LockedRect.pBits) + i * LockedRect.Pitch;
for (int j = 0; j<image.cols; j++)
{
ptr[3 * j] = pBuffer[4 * j]; //内部数据是4个字节,0-1-2是BGR,第4个现在未使用
ptr[3 * j + 1] = pBuffer[4 * j + 1];
ptr[3 * j + 2] = pBuffer[4 * j + 2];
}
}
cv::Mat dst;
cv::resize(image, dst, cv::Size(x, y), 0, 0, 1);
cv::imshow("view", dst);
cv::waitKey(30);
//imshow("colorImage", dst); //显示图像
}
else
{
AfxMessageBox(_T("获取数据无效"));
}
//5、这帧已经处理完了,所以将其解锁
pTexture->UnlockRect(0);
//6、释放本帧数据,准备迎接下一帧
NuiImageStreamReleaseFrame(colorStreamHandle, pImageFrame);
}
if (cvWaitKey(20) == 27)
break;
}
//7、关闭NUI链接
NuiShutdown();
return ;
}大概结果是这样的
最后
也没什么干货,就是把找资料过程中一些比较好的教程做了个总结。但是程序写完奇怪的是kinect摄像头和自带摄像头并不能一起调用。















 4235
4235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









