






一、FPGA 在线升级
FPGA 在线升级FLASH时,一般是通过逻辑生成SPI接口操作FLASH,当然也可以通过其他SOC经FPGA操作FLASH,那么FPGA就要实现在启动后对FLASH的控制。
对于7Series FPGA,只有CCLK是专用引脚,SPI接口均为普通IO可直接通过约束解决,CCLK产生需通过STARTUPE2产生。
对于UltraScale 及UltraScale+系列,所有FLASH配置引脚(包含CCLK和SPI)均为专用引脚,在bit运行时需通过STARTUPE3产生。
二、STARTUPE2
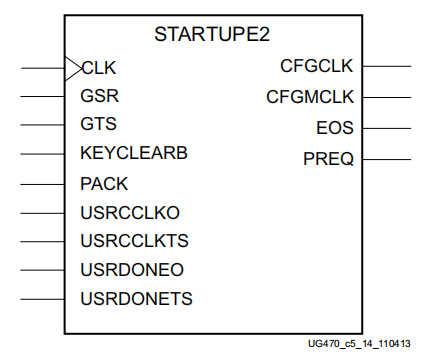
参考Xilinx ug470,STARTUPE2接口框图如下:
对SPI设置为X1,STARTUPE2例程如下:
STARTUPE2 #(
.PROG_USR("FALSE"), // Activate program event security feature. Requires encrypted bitstreams.
.SIM_CCLK_FREQ(0.0) // Set the Configuration Clock Frequency(ns) for simulation.
)
STARTUPE2_spi (
.CFGCLK(), // 1-bit output: Configuration main clock output
.CFGMCLK( ), // 1-bit output: Configuration internal oscillator clock output
.EOS(), // 1-bit output: Active high output signal indicating the End Of Startup.
.PREQ(), // 1-bit output: PROGRAM request to fabric output
.CLK(1'b0), // 1-bit input: User start-up clock input
.GSR(1'b0), // 1-bit input: Global Set/Reset input (GSR cannot be used for the port name)
.GTS(1'b0), // 1-bit input: Global 3-state input (GTS cannot be used for the port name)
.KEYCLEARB(1'b1), // 1-bit input: Clear AES Decrypter Key input from Battery-Backed RAM (BBRAM)
.PACK(1'b1), // 1-bit input: PROGRAM acknowledge input
.USRCCLKO(i_SPI1_CLK), // 1-bit input: User CCLK input
.USRCCLKTS(1'b0), // 1-bit input: User CCLK 3-state enable input
.USRDONEO(1'b1), // 1-bit input: User DONE pin output control
.USRDONETS(1'b1) // 1-bit input: User DONE 3-state enable output
);
assign o_QSPI_flash_MOSI = i_SPI1_MOSI;
assign o_QSPI_flash_CSB = i_SPI1_CSB;
assing o_SPI1_MISO = i_QSPI_flash_MISO;
其中:
(1)o_QSPI_flash_MOSI、o_QSPI_flash_CSB、i_QSPI_flash_MISO、o_QSPI_flash_SCLK为连接到FLASH的信号,i_SPI1_MOSI、i_SPI1_CSB、o_SPI1_MISO、i_SPI1_CLK为FPGA内部产生或其他SOC产生的配置FLASH SPI信号,FPGA通过STARTUPE2 和逻辑完成这些信号和FLASH的连接;
(2)STARTUPE2 中USRCCLKO为输入,USRCCLKTS为三态控制信号,当USRCCLKTS=0,时USRCCLKO输出到CCLK,用于配置FLASH,因CCLK为专用管脚,故代码中不需要CCLK的描述;
(3)USRDONETS的控制与USRCCLKTS类似,USRDONETS=0,USRDONEO直接输出到FPGA的配置DONE引脚
(4)CFGCLK为输出的配置时钟,FPGA可用该时钟产生SPI逻辑,也可用其他时钟信号
三、STARTUPE3
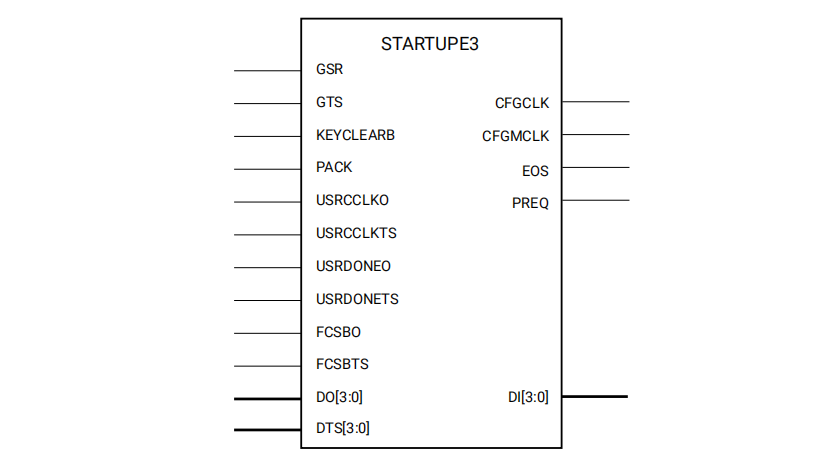
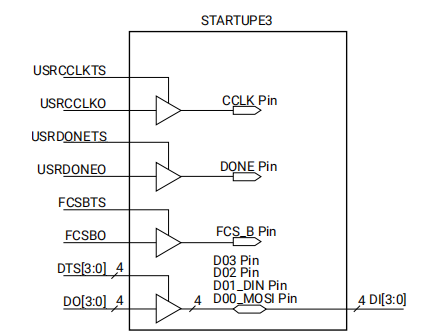
参考Xilinx ug570,STARTUPE3接口框图如下:

对SPI设置为X1,STARTUPE3例程如下:
wire [3:0] QSPI_in_null;
STARTUPE3 #(
.PROG_USR("FALSE"), // Activate program event security feature. Requires encrypted bitstreams.
.SIM_CCLK_FREQ(0.0) // Set the Configuration Clock Frequency (ns) for simulation.
)
STARTUPE3_inst (
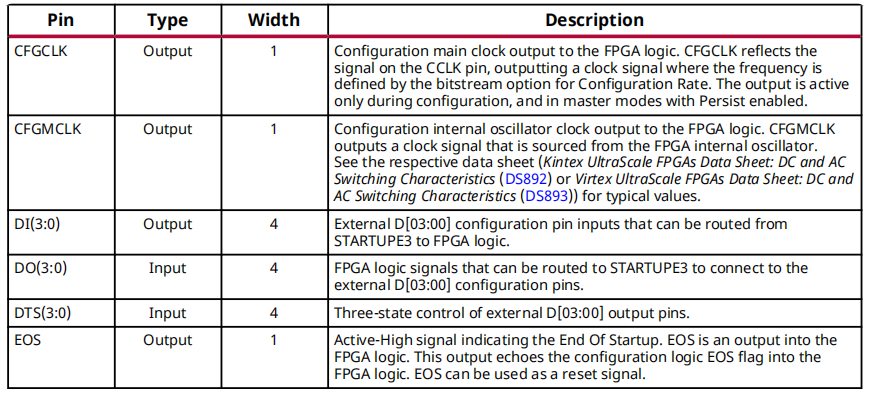
.CFGCLK(), // 1-bit output: Configuration main clock output.
.CFGMCLK(), // 1-bit output: Configuration internal oscillator clock output.
.DI({QSPI_in_null[3:2],i_QSPI_flash_MISO,QSPI_in_null[0]}), // 4-bit output: Allow receiving on the D input pin.
.EOS (), // 1-bit output: Active-High output signal indicating the End Of Startup.
.PREQ(), // 1-bit output: PROGRAM request to fabric output.
.DO({3'b111,o_QSPI_flash_MOSI}), // 4-bit input: Allows control of the D pin output.
.DTS(4'b0010), // 4-bit input: Allows tristate of the D pin.
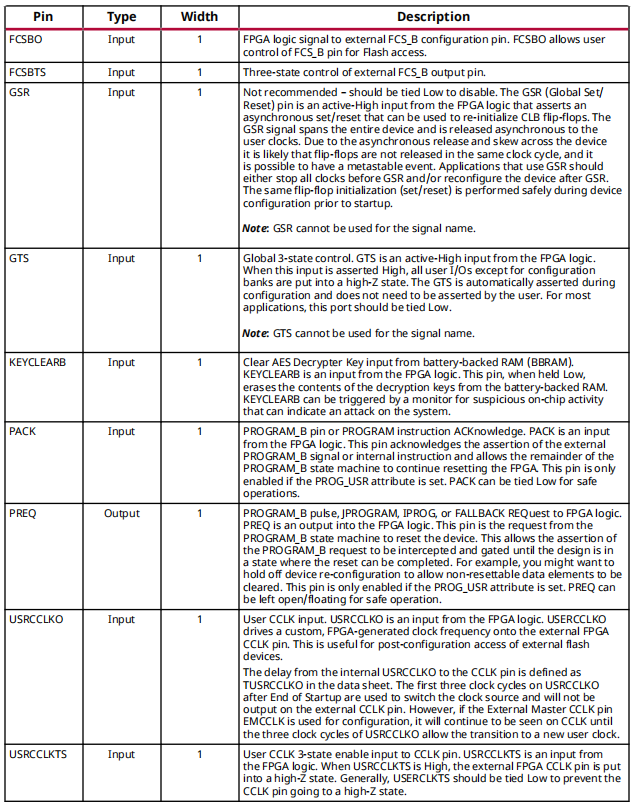
.FCSBO(o_QSPI_flash_CSB), // 1-bit input: Controls the FCS_B pin for flash access.
.FCSBTS(1'b0), // 1-bit input: Tristate the FCS_B pin.
.GSR(1'b0), // 1-bit input: Global Set/Reset input (GSR cannot be used for the port).
.GTS(1'b0), // 1-bit input: Global 3-state input (GTS cannot be used for the port name).
.KEYCLEARB(1'b1 ), // 1-bit input: Clear AES Decrypter Key input from Battery-Backed RAM (BBRAM).
.PACK(1'b1), // 1-bit input: PROGRAM acknowledge input.
.USRCCLKO(o_QSPI_flash_SCLK), // 1-bit input: User CCLK input.
.USRCCLKTS(1'b0), // 1-bit input: User CCLK 3-state enable input.
.USRDONEO(1'b1), // 1-bit input: User DONE pin output control.
.USRDONETS(1'b1) // 1-bit input: User DONE 3-state enable output.
);
其中:
(1)o_QSPI_flash_MOSI、o_QSPI_flash_CSB、i_QSPI_flash_MISO、o_QSPI_flash_SCLK为FPGA内部产生或其他SOC产生的配置FLASH SPI信号,FPGA通过STARTUPE3 和逻辑完成这些信号和FLASH的连接,应CCLK和SPI均为专用管脚,故代码中不需要CCLK的描述;
(2)STARTUPE3 中USRCCLKO为输入,USRCCLKTS为三态控制信号,当USRCCLKTS=0,时USRCCLKO输出到CCLK,用于配置FLASH
(3)DO为FPGA输出到FLASH的QSPI 数据信号,例程采用了SPIx1,仅D0 MOSI有效,D3 D2设置为1,falsh WP_B和HOLD_B信号无效;
(4)DI为FLASH输入到FPGA的QSPI 数据信号,例程采用了SPIx1,仅D1 MISO有效;
(5)DTS为数据信号方向,例程采用了SPIx1,所以D0为MOSI,D1为MISO,其他为WP和HOLD信号,所以DTS设置为4’b0010
(4)FCSBO为FPGA输出到FLASH的FCSBO信号,FCSBTS=0表示由FPGA逻辑输出o_QSPI_flash_CSB到FLASH的CSB
(5)DTS为数据信号方向,例程采用了SPIx1,所以D0为MOSI,D1为MISO,其他为WP和HOLD信号,所以DTS设置为4’b0010
(6)USRDONETS的控制与USRCCLKTS类似,USRDONETS=0,USRDONEO直接输出到FPGA的配置DONE引脚
(7)CFGCLK为输出的配置时钟,FPGA可用该时钟产生SPI逻辑,也可用其他时钟信号
STARTUPE3有许多三态控制,如下图所示,当三态控制信号为0时,信号按下图中反向传输,为1是反向。
参考文件
ug570-ultrascale-configuration
ug470-ultrascale-configuration

















 4406
4406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









