






 本文介绍了二次雷达和单脉冲雷达相关知识。二次雷达是空中交通管制重要监视设备,阐述其原理、测距测角方法、询问与应答信号,分析特点及优缺点,如存在绕环效应、异步干扰等问题及解决办法。还介绍了单脉冲雷达原理、和差电桥及询问机技术指标。
本文介绍了二次雷达和单脉冲雷达相关知识。二次雷达是空中交通管制重要监视设备,阐述其原理、测距测角方法、询问与应答信号,分析特点及优缺点,如存在绕环效应、异步干扰等问题及解决办法。还介绍了单脉冲雷达原理、和差电桥及询问机技术指标。
目录
前言
二次雷达的历史:- 二次雷达是空中交通管制的重要组成部分,属于监视设备。
- 二次雷达几乎和一次雷达同时发展起来的,由于一次雷达回波无法判断敌我,因此它最初是在空战中为了使雷达分辨出敌我双方的飞机而发展的敌我识别系统。
- 当把这个系统的基本原理和部件经过发展后用于民航的空中交通管制后,就成了二次雷达系统。
- 管制员从二次雷达上很容易知道飞机的二次雷达应答机代码、飞行高度、飞行速度、航向等参数,使雷达由监视的工具变为空中管制的手段,二次雷达的出现是空中交通管制的最重大的技术进展。
1、 二次雷达原理
1.1 基本原理
二次监视雷达(SSR)和一次监视雷达的区别:
- 一次监视雷达是依靠目标反射雷达发射的电磁波而主动发现目标并确定其位置。
- 二次监视雷达则不能靠接收目标反射的脉冲工作。
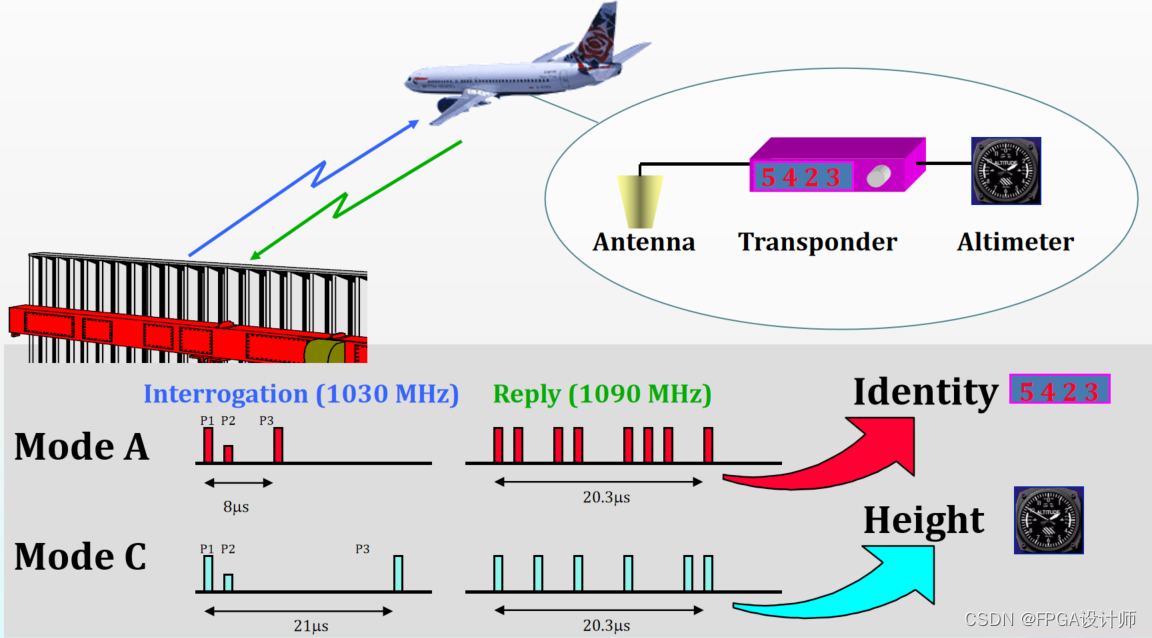
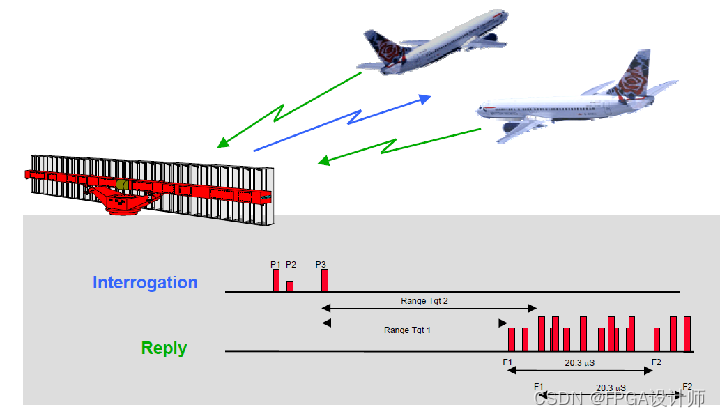
二次雷达工作方式
- 由地面站(通常称询问机)通过天线的方向性波束发射频率为1030MHz 的一组询问编码脉冲。
- 当天线的波束指向装有应答机的飞机的方向时,应答机检测这组询问编码信号,并判断编码信号的内容,然后由应答机用1090MHz 的频率发射一组回答编码脉冲。
- 回答信号由地面站检测并由录取器处理,由它测量目标的距离、方位、回答编码的内容等,形成目标的点迹报告送到后续设备。
- 由于完成一次目标的定位是靠两次有源辐射完成的,所以称之为二次雷达。

1.2 测距和测角
测距
- 测距是基于光速不变的原理(光速c = 3×10^ 8 米/S)。
- 由于回波信号往返于雷达和目标之间,它将滞后于所发射的探测脉冲。以探测脉冲作为时间基准,假设滞后的时间为t r ,则目标和雷达站之间的斜距R 为:
R = C ∗ t r ∗ 0.5 \ R = C * tr * 0.5 R=C∗tr∗0.5
测角
- 对于监视雷达而言系指方位角α,亦即偏离正北方向的角度。
- 一般由扫描天线主波束的指向所确定。
1.3 询问信号
1.3.1 询问脉冲
由地面询问机的发射的信号,询问信号是以脉冲编码形式发射。询问模式有以下几种:在民航领域使用模式A和模式C。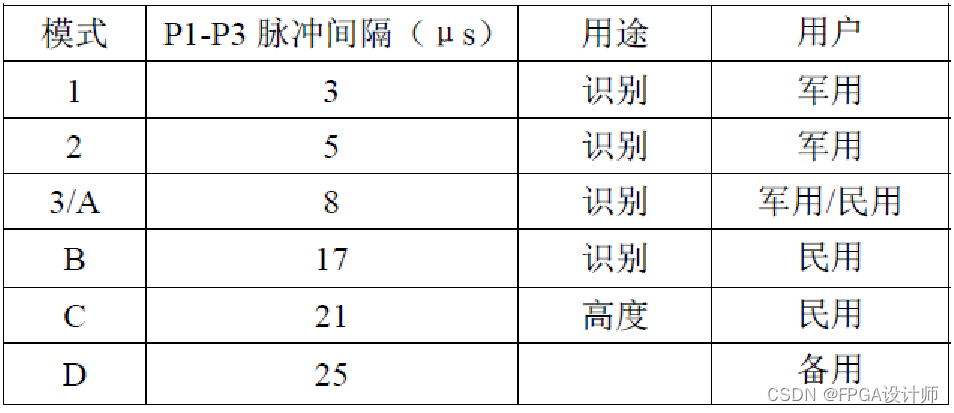
1.3.2 询问模式
- P2脉冲总是距P1脉冲2微秒。
- 模式交替询问可以在相邻的询问周期进行,有单模式,双模式和三模式。
- ICAO规定民航空管二次雷达只采用A和C模式交替询问。
- ICAO规定
– 询问脉冲宽度为0.8±0.1微秒
– 上升时间0.05—0.1微秒
– 下降时间0.01—0.2微秒

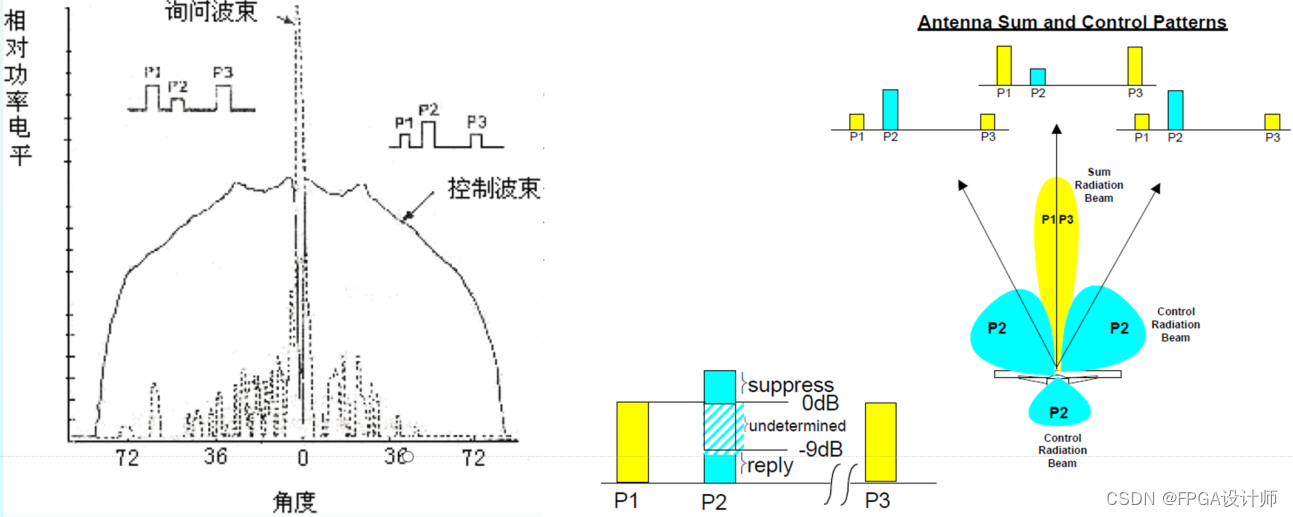
1.3.3 三脉冲询问体制
- P1、P3模式询问脉冲,询问波束(主瓣)辐射
- P2旁瓣抑制脉冲(控制脉冲),控制波束辐射。

1.4 应答信号
1.4.1 应答脉冲
- 当机载应答机收到地面询问机发射的询问信号后,根据询问的内容,自动回答一串编码脉冲,称为应答码。
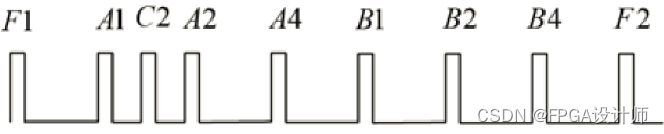
- 应答码由16 个脉冲组成,有框架脉冲F1、F2、X位、13个脉冲位组成。
- F1和F2脉冲为框架脉冲,表示一个回答的存在,因此回答必须发射。
- A、B、C、D表示回答的数据位,模式A和模式C中数据位的含义不同。
- 数据位之间有严格的时间关系,每个脉冲0.45微秒,脉冲之间为1.45微秒。
- X位为备用位,目前恒为逻辑0
- SPI为特殊位置识别脉冲
--在F2脉冲后4.35微秒
--由管制员请求发射在A模式中
--每次发射一般持续20秒结束

1.4.2 A模式应答
模式A的回答为应答识别码,其顺序为A、B、C、D。一共有4096个不同的组成。
应答码有三组代码定义为危急码,不能选作识别码。当地面站收到这三种危急码时,终端处理设备将优先予以处理,并在显示器上闪烁告警,提醒管制员采取应急的措施。这三组码为:
- 7500 表示飞机被劫持
- 7600 表示飞机通信系统故障
- 7700 表示飞机故障危急
A模式应答与脉冲的对应关系如下图:




1.4.3 C模式应答
响应C 模式询问的回答是高度码,译码后判决飞机高度的码位序列是按下述排列:
- D、A、B 共九位构成标准循环码,按500 英尺递增
- C 共三位形成五周期循环码,按100 英尺递增
- 由于D1 代表了最高位,目前民用飞行器尚未达到这个高度,所以民航组织规定D1 位恒为逻辑0。
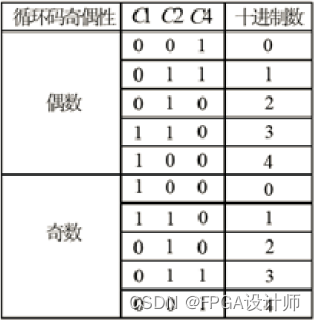
- 五周期循环码所对应的数值与前面标准循环码(格雷码)所对应的十进制数是奇数还是偶数有关,亦即应校验标准循环码所对应的二进制码(用模二和算)末位是1 还是0,以决定五位循环码的数值。
- 高度码以海拔-1200英尺为起点(000,000,000,001),因此飞机实际海拔高度应在应答机给出的高度数值后减去1200英尺。

高度码的译码 - 标准循环码的译码
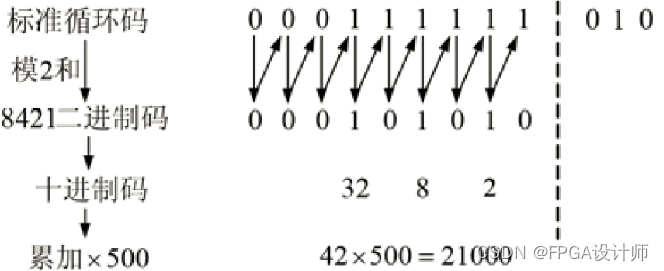
- 五周期码按照循环码奇偶性查表,上述为偶数
查表数值×100英尺
上述为010,偶数查表为2,乘以100英尺为200英尺。
高度码译码为21000+200=21200英尺
21200-1200=20000英尺
高度码实例,译码后为20000英尺
2 、二次雷达的特点和优缺点
2.1 二次雷达的特点
- 收发频率不同,发射1030MHZ,接收1090MHZ。
- 信号单程工作。
- 采用编码信号发送和接收,具有通信的特征,可以交换信息。
- 由于询问频率和回答频率不同,避免了一次雷达的地物杂波和气象杂波干扰。
- 由于目标的定位是靠两次有源辐射,同样的辐射功率二次雷达作用距离远。
二次雷达1.5kw 200nm
一次雷达650kw 110nm - 但是询问机不能接收询问频率的回波信号,因此不能检测到没有应答机的目标。
- 二次雷达只用统一的询问应答频率,带来固有的干扰问题。如异步干扰
2.2 二次雷达的缺点
- 主瓣:比较窄,水平波束宽度在-3dB 点上保持在2°~ 2.5°范围之内,正常询问波瓣。
- 旁瓣:电平比较低。询问波束方向性图的第一旁瓣电平约为-24dB,距离23.5KM。平均辐射场强亦可达-30dB 左右,距离可达12.5KM。
- 近距离旁瓣电平可能造成有效的询问,旁瓣也可能接收到飞机的应答。

2.2 绕环效应
- 雷达站附近的目标大部分时间处于旁瓣覆盖之内,受到旁瓣的询问,会出现断续或持续回答。
- 由于回答是同步的,距离基本相同,因此在雷达站附近产生一圈比较密集的应答信号,在早期使用的平面位- 置显示器上,显示的模拟回答目标会出现“绕环效应”(Ringing)。
- 危害,夸大飞机数量,可能造成处理系统过载,辨力变差,可能给真实目标一个错误的定位而造成不必要的干扰。

2.3 ISLS
旁瓣抑制ISLS(Interrogator Side Lobe Suppression)
- 解决绕回效应
- 使用控制波束防止飞机回答询问波束的旁瓣询问。
- P2脉冲为 控制波束脉冲,使用全向天线辐射出去。
- 控制波束的增益覆盖询问波束旁瓣的增益,处于旁瓣询问方向的应答机收到的信号强度P2>P1,在主波束方向P2<P1。
- P1 和P2 脉冲间隔保持固定2微秒。
- 应答机通过对P1 和P2 幅度的判决决定是否是旁瓣询问,是否予以回答。
2.4 目标反射( Reflection)
- 旁瓣询问电平极低,仅收到旁瓣辐射的P2独立脉冲,P1脉冲未捕获到,旁瓣抑制失效。
- 但是飞机接收到经过反射的主瓣询问,P1>P2,飞机应答。
- 经过反射路径接收到飞机假目标,出两架或多架假目标飞机,有时还会显示DC(重复二次代码)告警。

2.5 IISLS
IISLS/I2SLS(Improved Interrogator Side Lobe Suppression)即改进旁瓣抑制,其主要作用是:
- 解决反射问题。
- 控制通道辐射减弱的P1脉冲(P1 cont)和正常电平P2脉冲,一般为1/2P1+P2。
- 应答机收到1/2P1+P2 ,抑制应答35微秒,保证在被反射询问触发前就能被抑制应答。

IISLS的缺陷:
- 全向天线辐射1/2P1+P2,空军应答机都能收到,产生“群捕获”效应。
- 抑制期间全部应答机被阻塞。
- 询问机不能收到自身询问的应答信号。
- 容易丢目标,不能连续跟踪,降低系统可靠性。
- 滑窗检测时,方位精度变差。
- 一般ISLS无效下采用IISLS。
- IISLS/I2SLS的局限性,抑制时间为35±10微秒,因此只能抑制直射波和反射波的路程差小于35微秒范围内的反射目标,约3.85KM—6.92KM之间。
- 可采用分区使用ISLS或I2SLS。

2.6 异步干扰
异步干扰即“Fruit— False Replies Unsynchronised In Time”
- 雷达询问机收到它覆盖范围之内由另外询问机询问引起应答机的应答信号。
- 容易发生在飞机高度高,多雷达探测范围内。
- 可出现“占据”现象,应答机应答后休止期(军用应答器约125微秒),或旁边询问35微秒抑制期,不接受任何询问,造成目标丢失。

2.7 旁瓣抑制
旁瓣抑制即RSLS,主要用来解决异步干扰问题。
- 异步干扰主要(约三分之二)来自询问机天线的旁瓣。控制波瓣的增益将大于除询问天线主瓣以外的尾瓣增益。
- 安装和Σ接收机特性一致的Ω接收机。
- 比较旁瓣和控制波瓣收到的回答信号,旁瓣收到的信号必然小于控制波瓣收到的信号。
- 接收机放大检测对这两个信号比较判决。
- 如果Ω接收机输出的信号大于主接收机(旁瓣收到)信号,就可以判定该信号是旁瓣信号且为异步回答。
- 判断信号可作为一个控制信号去启动主接收通道的视频放大器,抑制旁瓣信号的输出。也可给回答的每一个旁瓣脉冲标记一个符号,送到录取器,在这里只作独立脉冲的判决而不是整个回答的判决,防止把主瓣收到的回答也被排除。

2.8 同步串扰
同步串扰( Garble )的主要原因为:
处于同一波束的两架飞机距离小于2海里(3.7KM),产生应答码的重叠。常规雷达探测回波强度几乎一致,无法区分。给出开始和结束的目标存在信息(多架交织( interlace )),不译码。
2.9 滑窗检测
滑窗检测原理:
-
为波瓣一次扫描N个回答脉冲,设置一个滑动窗口。
-
N的大小与波束宽度相适应。
-
每个窗口的延迟是一个(询问)重复周期T。
-
波束扫过目标期间将得到一串回波脉冲,目标在天线波束驻留期间收到N个回波脉冲时,设置N-1个延迟单元,每个延迟单元延迟一个重复周期T。每个回波脉冲按时间顺序鱼贯而入延迟单元。
-
窗口中能够观察同一距离(量化)间隔中N个相邻重复周期的量化信息。
-
新的被量化的的“0/1”信号连续从左端进入,旧的扫描从滑窗的右端排出,检测窗口始终存在N次扫描信号,于是N次扫描的各距离单元的信号,依时间顺序送到加法器得到相加输出。
-
量化信息(含噪声)超过预先设置的第二门限时,发出目标起始报告,判决目标存在,当量化信息低于另一个门限值时,发出目标终了报告,表示回波结束。

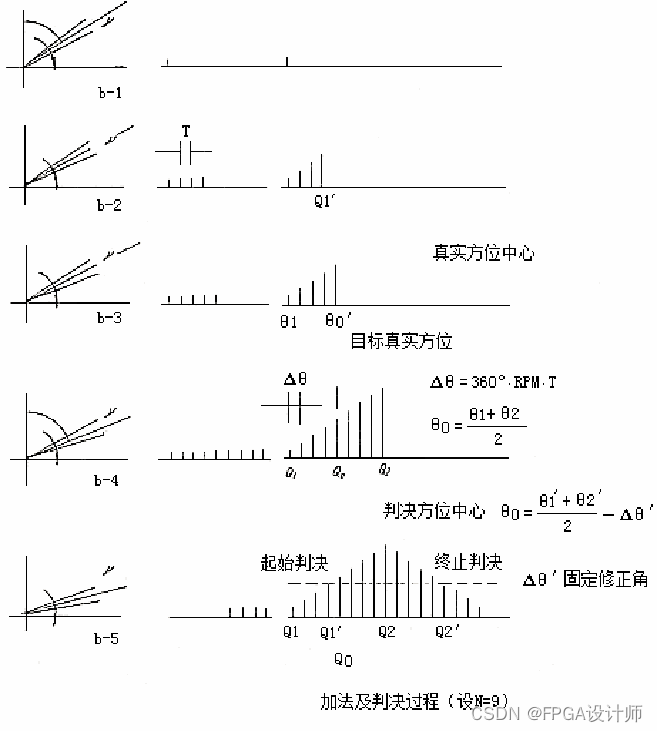
滑窗测角原理: -
防止异步干扰,须确定窗口脉冲存在的最小值,作为第二检测门限。
-
窗口最小值取决于天线每次扫描的回答数,反过来取决于询问机的询问率、天线转速、交替询问等。
-
如8个窗口中存在5次回答就可以判断目标存在,这就是目标起始判据。此时存储天线方位指向θ1′。
-
在天线波束离开飞机以后,将收不到回波脉冲。但是滑窗内容继续移动,并且不断放弃存储在窗口的原有的数据,由于没有新的回波脉冲进入滑窗,当窗口中存储的目标数低于某一个数值时,例如8个窗口存在4个脉冲时,可以申报目标终了,这样就建立了尾沿判据或目-标终了判据,并存储天线方位指向θ2′
-

滑窗积累输出(目标)

滑窗积累输出(干扰)

目标方位角确定: -
建立目标起始准则同时录取天线指向角θ1′。
-
建立目标终止准则同时录取天线指向角θ2′。
-
计算得到目标方位角:
目标方位角 = θ1′+θ2′-补偿角 
目标滑窗录取过程
小滑窗检测原理: -
波束宽度内窗口长度小于接收的回波脉冲数N的检测器。如N=20—30时,窗口长度L=5—7。
-
第二门限检测目标起始和终止,和滑窗检测相同。
窗口连续5次接收到可靠回波,给出目标起始信息,并记下此时方位角θ1′。
窗口一旦出现4次脉冲回波(窗口宽度5),给出目标终止信息,记下这时的方位角θ2′。 -
小滑窗的窗口小,易于受到噪声的干扰,需要设置第三门限积累计数。第三门限使用长积累时间电路,进行脉冲或方位延伸计数,目的可以用它来判断目标是否真实存在。
满足目标起始启动第三门限计数。
满足目标终止关闭第三门限计数。
计数值和预置门限比较。小于门限可能为随机噪声干扰或超过覆盖范围远距离的目标,大于门限可能为旁瓣接收,舍去以减少后续设备处理的负担。 -
真实的方位和滑窗检测方法估算。
滑窗检测 缺陷 -
录取一个目标需要多个回波脉冲。
波束宽度一定,需要增加重复频率。
对于二次雷达增加异步干扰。 -
滑窗检测技术本身方位估值有较大的误差。
实践标明滑窗检测有0.3度的误差。在80海里的距离上,由此导致偏离平滑航迹的位置约0.4海里,而在200海里上相当于1海里。 -
干扰或录取回波目标丢失,造成位置误差和航迹的后续跟踪不连续。

3 、单脉冲雷达
单脉冲是一种精确测试信号到达角的雷达录取技术。它的名字是由一个回答脉冲就可以确定目标到达角而得。
在二次世界大战期间已经开发出单脉冲技术,至于单脉冲技术用到二次监视雷达只是近几十年的事。
3.1 单脉冲原理
- 单脉冲测角三要素
Θ天线瞄准轴指向角—天线码盘给出。
ΔΘ偏离瞄准轴的角度—单脉冲技术解决。
±偏离瞄准轴的方向—单脉冲技术解决。 - 方位角= Θ ± ΔΘ

- 除了的一个高增益询问波束“和”波束(Σ)及一个足够宽的控制波束(Ω)外,还有一个第三波束,即差波束(Δ)
- 使用三个接收机分别接收处理这三个( Σ、 Δ、 Ω )信号。
- 和差波形图
当目标处于不用角度时,得到的差信号幅度和相位都有不同。
利用这个变化,查表(OBA)得到目标的方位角。

- 和差波形的形成
雷达天线采用等效间隔为d的2个辐射单元。
辐射方向图相同的的2个信号。
远场信号相加,形成和信号。
远场信号相减,形成差信号。
到达2个辐射单元任何方向上接收到的信号。
强度相同(是到达辐射单元的信号,不是差信号)。
相位不同。 - 2个辐射单元和飞机的回波关系

- 相位不同是由于电磁波的等相位面(波前面)传播时进入等效辐射单元先后不同引起的波程差。

- 接收到信号的矢量图,设接收到2信号的波程差为φ。


- 偏离瞄准轴的大小
- 从公式可以看出不同角度的目标,最终导致差信号的幅度不同。

-
偏离瞄准轴方向
差信号矢量与和信号矢量总是正交。
偏离瞄准轴左侧还是右侧表现在±90°。
当回答信号从瞄准轴向右端进入波束时,E1 相位滞后E2 φ角,迭加结果差信号滞后和信号90°,当回答信号从瞄准轴向左端进入波束时,E1 相位超前E2 φ角,迭加结果差信号超前和信号90° -
在二次监视雷达矢量图中还可以看到,当θ角减少时,即目标靠近瞄准轴时, φ角也随之减少,差信号的强度也减少。

-
雷达波束图

-
OBA与差信号

-
单脉冲信号处理
偏离标准值大小信息。
偏离瞄准轴方向信息—符号。 -
分类
单脉冲信息幅度处理—求解Δ信号。
单脉冲信息相位处理—求解φ信号。 -
单脉冲信息幅度处理

-
单脉冲信息相位处理

-
求出Δ或φ的数值,通过查OBA表,得到Δθ。
3.2 和差电桥
和差电桥结构

- 差端口:L和R信号相位相差180度,叠加信号为矢量差。
- 和端口:L和R信号相位差为0度,叠加信号为矢量和。
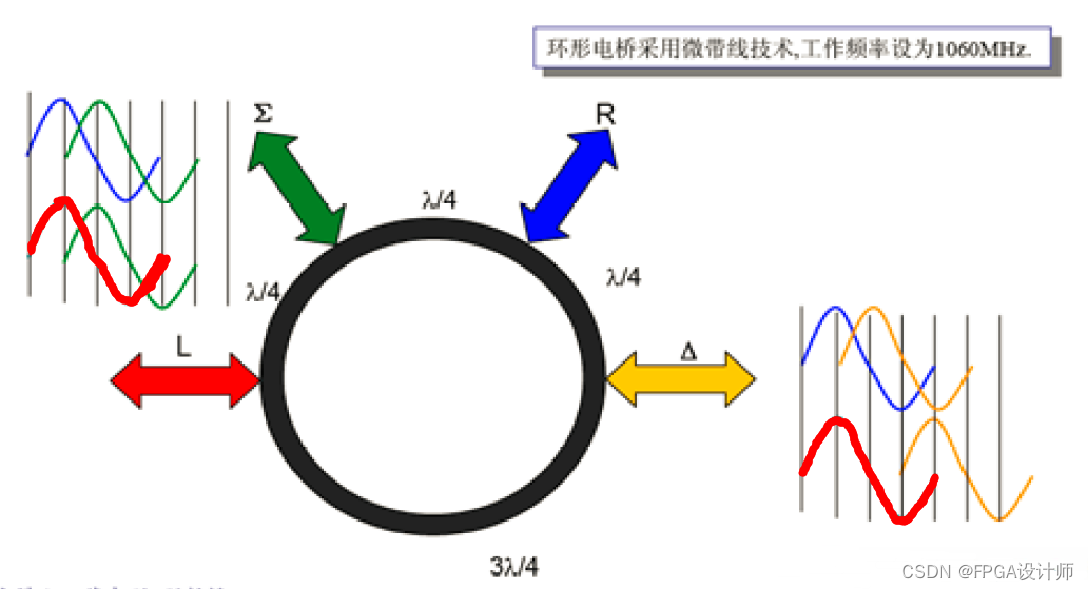
- 差信号超前和信号90度
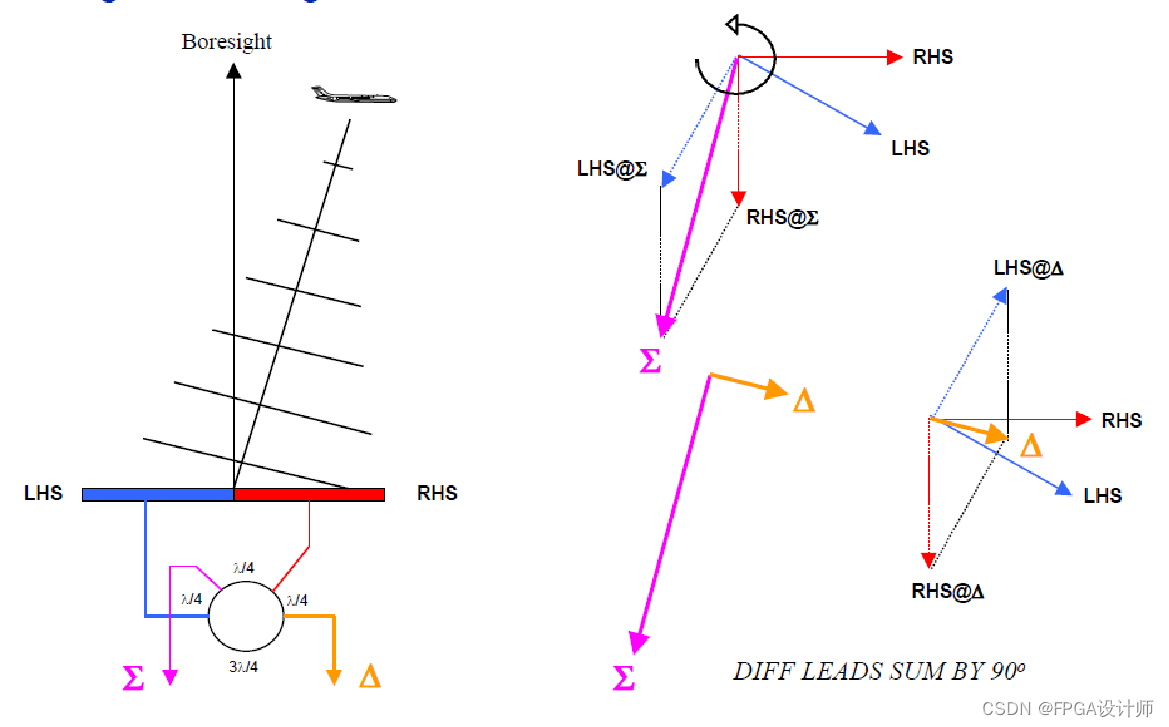
- 差信号为零,和信号最大
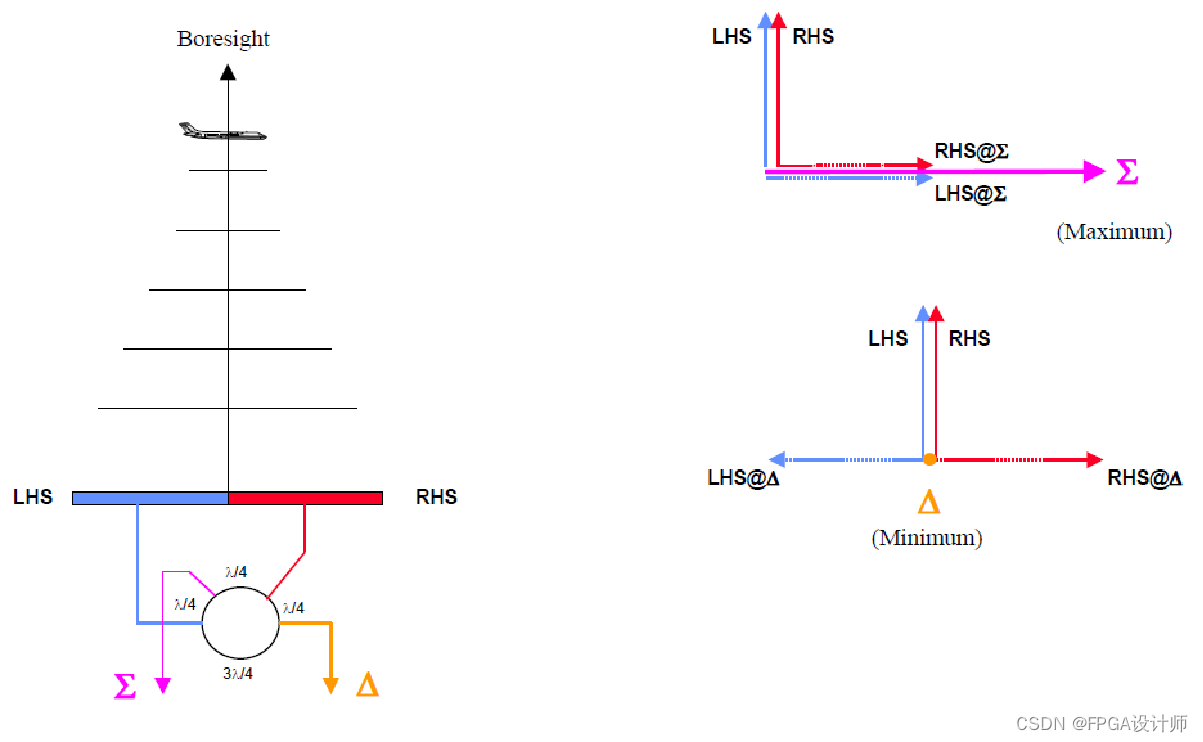
- 差信号滞后和信号90度

3.3 询问机技术指标
- 功率:1.5—2KWP
- 发射频率:1030±0.1MHz,1030±0.01MHz(S模式)
- 询问率:50—450Hz
- 模式:1、2、3/A、B、C、D、S
- 接收频率:1090±5MHz
- 接收机灵敏度:-80—-87dBm
- 极化方向:垂直极化
- 天线增益:大于24dB
- 旁瓣电平:低于-24dB

















 1305
1305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









