







排序系列篇:

最早的关于list-wise的文章发表在Learning to Rank: From Pairwise Approach to Listwise Approach中,后面陆陆续续出了各种变形,但是也是万变不离其宗,本文梳理重在原理。
1. 为什么要List-wise loss
pairwise优缺点
优点:
- 一些已经被验证的较好的分类模型可以直接拿来用。
- 在一些特定场景下,其pairwise features 很容易就可以获得。
缺点:
- 其学习的目标是最小化文档对的分类错误,而不是最小化文档排序的错误。学习目标和实际目标(MAE,NDCG)有所违背。
- 训练过程可能是极其耗时的,因为生成的文档对样本数量可能会非常多。
那么本篇论文是如何解决这些问题呢?
在pointwise 中,我们将每一个<query, document> 作为一个训练样本来训练一个分类模型。这种方法没有考虑文档之间的顺序关系;而在pariwise 方法中考虑了同一个query 下的任意两个文档的相关性,但同样有上面已经讲过的缺点;在listwise 中,我们将一个<query,documents> 作为一个样本来训练,其中documents 为与这个query 相关的文件列表。
论文中还提出了概率分布的方法来计算listwise 的损失函数。并提出了permutation probability 和top one probability 两种方法。下面会详述这两种方法。
2. 方法介绍
2.1. loss输入格式
假设我们有m 个 querys:
Q
=
(
q
(
1
)
,
q
(
2
)
,
q
(
3
)
,
.
.
.
,
q
(
m
)
)
Q=(q^{(1)}, q^{(2)}, q^{(3)},...,q^{(m)})
Q=(q(1),q(2),q(3),...,q(m))
每个query 下面有n 个可能与之相关的文档(对于不同的query ,其n 可能不同)
d
(
i
)
=
(
d
1
(
i
)
,
d
2
(
i
)
,
.
.
.
,
d
n
(
i
)
)
d^{(i)} = (d^{(i)}_1, d^{(i)}_2, ..., d^{(i)}_n)
d(i)=(d1(i),d2(i),...,dn(i))
对于每个query 下的所有文档,我们可以根据具体的应用场景得到每个文档与query 的真实相关度得分。
y
(
i
)
=
(
y
1
(
i
)
,
y
2
(
i
)
,
.
.
.
.
,
y
n
(
i
)
)
y^{(i)} = (y^{(i)}_1, y^{(i)}_2, ...., y^{(i)}_n)
y(i)=(y1(i),y2(i),....,yn(i))
我们可以从每一个文档对
(
q
(
i
)
,
d
j
(
i
)
)
(q^{(i)}, d^{(i)}_{j})
(q(i),dj(i))得到该文档的打分,
q
(
i
)
q^{(i)}
q(i)与文档集合
d
(
i
)
d^{(i)}
d(i)中的每个文档打分,可以得到该query 下的所有文档的特征向量:
x
(
i
)
=
(
x
1
(
i
)
,
x
2
(
i
)
,
.
.
.
,
x
n
(
i
)
)
x^{(i)} = (x^{(i)}_1, x^{(i)}_2, ..., x^{(i)}_n)
x(i)=(x1(i),x2(i),...,xn(i))
并且在已知每个文档真实相关度得分的条件下:
y
(
i
)
=
(
y
1
(
i
)
,
y
2
(
i
)
,
.
.
.
,
y
n
(
i
)
)
y^{(i)} = (y^{(i)}_1, y^{(i)}_2, ..., y^{(i)}_n)
y(i)=(y1(i),y2(i),...,yn(i))
我们可以构建训练样本:
T
=
{
(
x
(
i
)
,
y
(
i
)
)
}
T=\begin{Bmatrix} (x^{(i)}, y^{(i)}) \end{Bmatrix}
T={(x(i),y(i))}
要特别注意的是:这里面一个训练样本是 ( x ( i ) , y ( i ) ) (x^{(i)}, y^{(i)}) (x(i),y(i)),而这里的 x ( i ) x^{(i)} x(i)是一个与query 相关的文档列表,这也是区别于pointwise 和pairwise 的一个重要特征。
关于 y ( i ) y^{(i)} y(i)paper里面的相关描述:
2.2. loss计算
那么有训练样本了,如何计算loss 呢?
假设我们已经有了排序函数 f ff,我们可以计算特征向量
x
(
i
)
x^{(i)}
x(i)的得分情况:
z
(
i
)
=
(
f
(
x
1
(
i
)
)
,
f
(
x
2
(
i
)
)
,
.
.
.
,
f
(
x
n
(
i
)
)
)
z^{(i)} = (f(x_1^{(i)}), f(x_2^{(i)}), ..., f(x_n^{(i)}))
z(i)=(f(x1(i)),f(x2(i)),...,f(xn(i)))
显然我们学习的目标就是,最小化真实得分和预测得分的误差:
∑
i
=
1
m
L
(
y
(
i
)
,
z
(
i
)
)
\sum_{i=1}^{m} L(y^{(i)}, z^{(i)})
i=1∑mL(y(i),z(i))
L 为 listwise 的损失函数。
2.2.1. 概率模型
假设对于某一个query 而言,与之可能相关的文档有
{
1
,
2
,
3
,
.
.
.
,
n
}
\{1, 2, 3, ..., n\}
{1,2,3,...,n},假设某一种排序的结果为
π
\pi
π
π
=
<
π
(
1
)
,
π
(
2
)
,
.
.
,
π
(
n
)
>
\pi=<\pi(1), \pi(2), .., \pi(n)>
π=<π(1),π(2),..,π(n)>
对于n 个文档,有n! 种排列情况。这所有的排序情况记为 Ω n \Omega_n Ωn。假设已有排序函数,那么对于每个文档,我们都可以计算出相关性得分 s = ( s 1 , s 2 , . . . , s n ) s = (s_1, s_2, ..., s_n) s=(s1,s2,...,sn)。 显然对于每一种排序情况,都是有可能发生的,但是每一种排列都有其最大似然值。
我们可以这样定义某一种排列
π
\pi
π的概率(最大似然值):
P
s
(
π
)
=
∏
j
=
1
n
ϕ
(
s
π
(
j
)
)
∑
k
=
j
n
ϕ
(
s
π
(
k
)
)
P_s(\pi) = \prod_{j=1}^{n} \frac{\phi (s_{\pi(j)})}{\sum_{k=j}^{n}\phi(s_{\pi(k)})}
Ps(π)=j=1∏n∑k=jnϕ(sπ(k))ϕ(sπ(j))
其中
ϕ
\phi
ϕ表示对分数的归一化处理。
例如有三个文档
π
=
<
1
,
2
,
3
>
\pi = <1,2,3>
π=<1,2,3> ,其排序函数计算每个文档得分为
s
=
(
s
1
,
s
2
,
s
3
)
s=(s_1, s_2, s_3)
s=(s1,s2,s3),则该种排序概率为:
P
s
(
π
)
=
ϕ
(
s
1
)
ϕ
(
s
1
)
+
ϕ
(
s
2
)
+
ϕ
(
s
3
)
⋅
ϕ
(
s
2
)
ϕ
(
s
2
)
+
ϕ
(
s
3
)
⋅
ϕ
(
s
3
)
ϕ
(
s
3
)
P_s(\pi) =\frac{\phi(s_1)}{\phi(s_1)+\phi(s_2)+\phi(s_3)} \cdot \frac{\phi(s_2)}{\phi(s_2)+\phi(s_3)} \cdot \frac{\phi(s_3)}{\phi(s_3)}
Ps(π)=ϕ(s1)+ϕ(s2)+ϕ(s3)ϕ(s1)⋅ϕ(s2)+ϕ(s3)ϕ(s2)⋅ϕ(s3)ϕ(s3)
对于另外一种排序,例如
π
′
=
<
3
,
2
,
1
>
{\pi}' = <3,2,1>
π′=<3,2,1> ,则这种排列概率为:
P s ( π ) = ϕ ( s 3 ) ϕ ( s 3 ) + ϕ ( s 2 ) + ϕ ( s 1 ) ⋅ ϕ ( s 2 ) ϕ ( s 1 ) + ϕ ( s 2 ) ⋅ ϕ ( s 1 ) ϕ ( s 1 ) P_s(\pi) =\frac{\phi(s_3)}{\phi(s_3)+\phi(s_2)+\phi(s_1)} \cdot \frac{\phi(s_2)}{\phi(s_1)+\phi(s_2)} \cdot \frac{\phi(s_1)}{\phi(s_1)} Ps(π)=ϕ(s3)+ϕ(s2)+ϕ(s1)ϕ(s3)⋅ϕ(s1)+ϕ(s2)ϕ(s2)⋅ϕ(s1)ϕ(s1)
很明显,< 3,2,1 >这个排序的打分最低,< 1,2,3 >这个排序的打分最高。
2.2.2. Top K Probability
上面那种计算排列概率的方式,其计算复杂度达到 n ! n! n!,太耗时间,由此论文中提出了一种更有效率的方法 top one。我们在这里推广到top k来分析总结。
上面计算某一种排序方式概率:
P
s
(
π
)
=
∏
j
=
1
n
ϕ
(
s
π
(
j
)
)
∑
k
=
j
n
ϕ
(
s
π
(
k
)
)
P_s(\pi) = \prod_{j=1}^{n} \frac{\phi (s_{\pi(j)})}{\sum_{k=j}^{n}\phi(s_{\pi(k)})}
Ps(π)=j=1∏n∑k=jnϕ(sπ(k))ϕ(sπ(j))
排在第一位的有
n
n
n 种情况,排在第二位的有
n
−
1
n−1
n−1 种情况,后面依次类推。相当与利用 top
n
n
n来计算。
那么 top
K
(
K
<
n
)
K(K<n)
K(K<n)计算:
P
s
(
π
)
=
∏
j
=
1
K
ϕ
(
s
π
(
j
)
)
∑
k
=
j
n
ϕ
(
s
π
(
k
)
)
P_s(\pi) = \prod_{j=1}^{K} \frac{\phi (s_{\pi(j)})}{\sum_{k=j}^{n}\phi(s_{\pi(k)})}
Ps(π)=j=1∏K∑k=jnϕ(sπ(k))ϕ(sπ(j))
同理,这里的计算复杂度为
n
∗
(
n
−
1
)
∗
(
n
−
2
)
∗
.
.
.
∗
(
n
−
k
+
1
)
n∗(n−1)∗(n−2)∗...∗(n−k+1)
n∗(n−1)∗(n−2)∗...∗(n−k+1),即为
N
!
/
(
N
−
k
)
!
N!/(N-k)!
N!/(N−k)!种不同排列,大大减少了计算复杂度。
如果
K
=
1
K=1
K=1,就蜕变成论文中top 1 的情况,此时有 n 种不同排列情况:
P
s
(
π
)
=
ϕ
(
s
π
(
j
)
)
∑
k
=
j
n
ϕ
(
s
π
(
k
)
)
P_s(\pi) = \frac{\phi (s_{\pi(j)})}{\sum_{k=j}^{n}\phi(s_{\pi(k)})}
Ps(π)=∑k=jnϕ(sπ(k))ϕ(sπ(j))
对于
N
!
/
(
N
−
k
)
!
N!/(N-k)!
N!/(N−k)!种不同的排列情况,就有 N!/(N−k)! 个排列预测概率,就形成了一种概率分布,再由真实的相关性得分计算相应的排列概率,得到真实的排列概率分布。由此可以利用 cross−entropy 来计算两种分布的距离作为损失函数:
L
(
y
(
i
)
,
z
(
i
)
)
=
−
∑
j
=
1
n
{
P
y
(
i
)
(
j
)
∗
l
o
g
(
P
z
(
i
)
(
j
)
)
}
L(y^{(i)}, z^{(i)}) = - \sum_{j=1}^{n} \{P_{y^{(i)}}(j) *log(P_{z^{(i)}}(j))\}
L(y(i),z(i))=−j=1∑n{Py(i)(j)∗log(Pz(i)(j))}
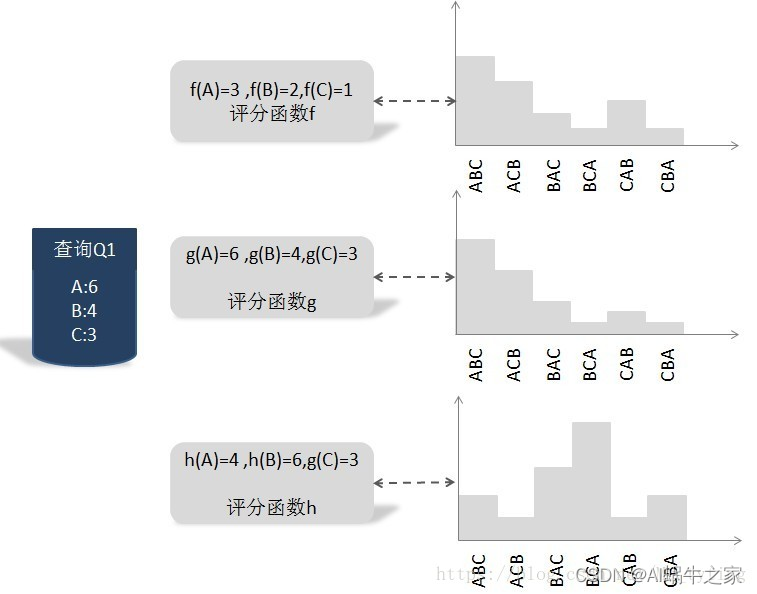
例如一个查询下有三个文档 < A , B , C > <A,B,C> <A,B,C>:
2.2.3. ListNet
这里给出ListNet最终的形式
在论文中,Listnet只是将上面的
t
o
p
K
topK
topK 中的
ϕ
\phi
ϕ函数变成 exp 函数:
P
s
(
π
)
=
exp
(
s
π
(
j
)
)
∑
k
=
j
n
exp
(
s
π
(
k
)
)
P_s(\pi) = \frac{\exp (s_{\pi(j)})}{\sum_{k=j}^{n}\exp(s_{\pi(k)})}
Ps(π)=∑k=jnexp(sπ(k))exp(sπ(j))
这样不就是计算预测出的得分的softmax 了吗?实际上的确如此,在实现代码中就是这样做的,当时我直接看代码还一脸懵逼,这不就是对文档预测出来的得分做了个softmax 操作吗?跟top−one 有什么关系,仔细看论文才知道怎么回事。
top−1 时,只有n 种排列情况,这大大减少了计算量。如果top K ( K > 1 ) K (K>1) K(K>1),则需要计算的排列情况就会变多。
假设排序函数 f 的参数为w ,则 top-one 的排列概率分布为:
P
z
(
i
)
(
f
w
)
(
x
j
(
i
)
)
=
exp
(
f
w
(
x
j
(
i
)
)
)
∑
k
=
j
n
exp
(
f
w
(
x
k
(
i
)
)
)
P_{z^{(i)}(f_w)}(x_j^{(i)}) = \frac{\exp (f_w(x_j^{(i)}))}{\sum_{k=j}^{n}\exp(f_w(x_k^{(i)}))}
Pz(i)(fw)(xj(i))=∑k=jnexp(fw(xk(i)))exp(fw(xj(i)))
这里还是需要注意:是将某一个查询下的所有可能与之相关的文档列表,作为一个样本来训练。
最终的损失函数:
L
(
y
(
i
)
,
z
(
i
)
(
f
w
)
)
=
−
∑
j
=
1
n
{
P
y
(
i
)
(
x
j
(
i
)
)
∗
l
o
g
(
P
z
(
i
)
(
f
w
)
(
x
j
(
i
)
)
)
}
L(y^{(i)}, z^{(i)}(f_w)) = - \sum_{j=1}^{n} \{P_{y^{(i)}}(x_j^{(i)}) *log(P_{z^{(i)}(f_w)}(x_j^{(i)}))\}
L(y(i),z(i)(fw))=−j=1∑n{Py(i)(xj(i))∗log(Pz(i)(fw)(xj(i)))}
小编总结:
简单来说, Listwise的loss其实从本质上可以归纳如下:
step1: 对所有包含正样本和负样本的集合进行softmax; step2: 在用交叉熵对所有样本求和计算loss
但是从原理上来说,其实这只是一个为了计算速度的折中。另外交叉熵中的groundtruth,也就是上面的 y j ( i ) y^{(i)}_j yj(i)打分,这样groundtruth打分越高的,如果预测误差大导致的loss越大,从而对实际为高分但是预测为低分的关注度更高,从而提高top的打分。
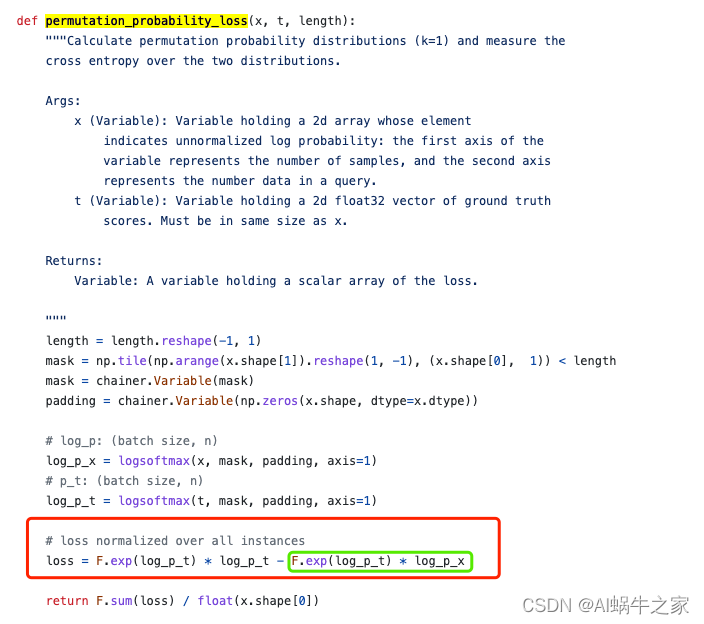
实现细节
在看源码的时候发现了一个细节,paper里面说的是交叉熵,但是在代码实现中我发现用的是交叉熵,也就是红色里面是KL散度,而绿色才是交叉熵。
总结
在pairwise 中,只考虑了两个文档对的相对先后顺序,却没有考虑文档出现在搜索列表中的位置,排在搜索站果前列的文档更为重要,如果前列文档出现判断错误,代价明显高于排在后面的文档。针对这个问题的改进思路是引入代价敏感因素,即每个文档对根据其在列表中的顺序具有不同的权重,越是排在前列的权重越大,即在搜索列表前列,如果排错顺序的话其付出的代价更高(评价指标NDCG); 而listwise 讲一个查询下的所有文档作为一个样本,因为要组合出不同的排列,得到其排列概率分布,来最小化与真实概率分布的误差,这里面就考虑了文档之间的各种顺序关系。很好的避免了这种情况。
从概率模型的角度定义损失函数。
在实做时,其实将一个query 下的的所有可能与之相关的n个doc作为一个训练样本(这时可以理解batch_size=n) ,一定要注意:在计算top_1 probability 时,是在一个query 内的所有文档做softmax ,而不是在当前正在训练的所有的样本内做。这是区别pointwise、pairwise 的重要不同之处。
参考链接:
论文分享— >Learning to Rank: From Pairwise Approach to Listwise Approach


















 1766
1766

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











