






路径规划算法:基于粒子群优化的路径规划算法--持地图任意创建保存,起始地点任意更改。
粒子群优化(PSO)算法在路径规划算法中具有以下优点:
1.并行性:粒子群算法是一种并行的优化算法,可以很好地处理大规模的问题,同时加快路径规划的速度。
2.全局搜索能力:粒子群算法利用粒子群在解空间中的搜索和信息共享,有较强的全局搜索能力,可以找到最优解或接近最优解。
3.自适应性:粒子群算法通过更新速度和位置的策略,可以自适应地调整搜索方向和速度,对路径规划中的动态环境适应性较强。
将粒子群算法应用到路径规划算法中可以按照以下步骤进行:
1.定义问题和目标:明确起点、终点和障碍物等约束条件,并确定最优路径规划目标,如最短路径或最优路径。
2.初始化粒子群:随机初始化一定数量的粒子,包括位置和速度等信息。
3.计算适应度值:根据路径规划的目标,计算每个粒子的适应度值,即评估解的好坏程度。
4.更新全局最优解:记录当前粒子群中适应度值最好的个体作为全局最优解。
5.更新个体最优解:对于每个粒子,根据历史最优解和全局最优解,更新个体最优解。
6.更新速度和位置:根据粒子群算法的更新策略,通过计算速度和位置的变化,更新粒子的状态。
7.重复迭代:重复执行第3步到第6步,直到达到预设的迭代次数或满足停止准则为止。
8.输出最优解:在迭代过程中保持记录全局最优解的个体,当迭代结束时,输出最优解作为路径规划的结果。
9.可选的后处理:对最优解进行可行性检查和后处理操作,例如检查路径是否碰撞障碍物,或者进行路径平滑等操作。
ID:6660729939933423
五***侠

路径规划算法是在计算机科学和人工智能领域中广泛应用的技术,通过寻找最优路径来解决从起点到终点的导航问题。粒子群优化(PSO)算法作为一种并行的优化算法,具有全局搜索能力和自适应性,被广泛应用于路径规划算法中。
首先,定义问题和目标是路径规划算法的第一步。我们需要明确起点、终点和障碍物等约束条件,并确定最优路径规划目标,如最短路径或最优路径。在路径规划中,起点和终点的位置可以根据实际情况进行任意更改,同时可以在地图上任意创建和保存。
接下来,我们需要初始化粒子群。粒子是路径规划中的解,它包括位置和速度等信息。在粒子群优化算法中,初始时会随机初始化一定数量的粒子,每个粒子的位置和速度是随机生成的。
为了评估每个粒子的好坏程度,需要计算适应度值。适应度值反映了每个粒子的解在解空间中的优劣程度,可以根据路径规划的目标来计算。对于最短路径的问题,适应度值可以是路径的总长度;对于最优路径的问题,适应度值可以是路径的质量评价指标。
在寻找最优解的过程中,需要更新全局最优解和个体最优解。全局最优解是当前粒子群中适应度值最好的个体,而个体最优解是每个粒子自身历史上最好的解。通过比较个体最优解和全局最优解,可以更新粒子的状态,即更新速度和位置。
更新速度和位置是粒子群优化算法的核心步骤。在更新速度时,粒子会考虑自身历史最优解和全局最优解的影响,并通过一定的策略来调整搜索方向和速度。在更新位置时,粒子会根据新的速度值来改变自身的位置,以期望找到更好的解。
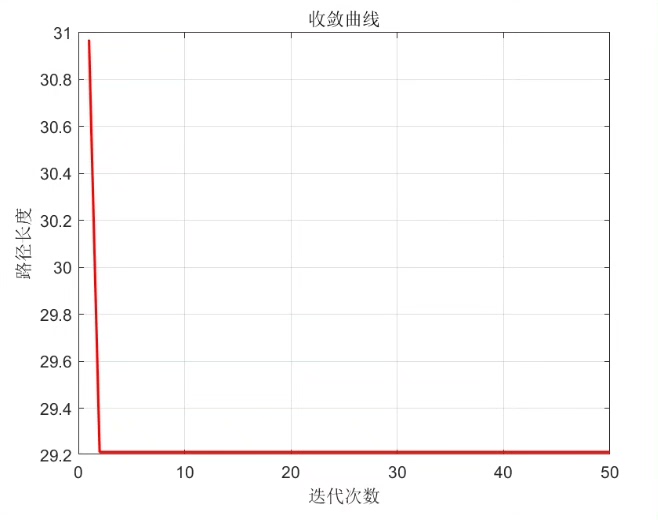
重复迭代是粒子群优化算法的基本流程。在每一次迭代中,会再次计算适应度值,并更新全局最优解和个体最优解。这个过程将一直持续,直到达到预设的迭代次数或满足停止准则为止。
当迭代结束后,我们将输出全局最优解作为路径规划的结果。全局最优解是经过多次迭代后找到的最优解,它能够满足预设的目标,如最短路径或最优路径。然而,最优解可能还需要进行后处理操作,以确保路径的可行性。例如,需要检查路径是否与障碍物碰撞,或者对路径进行平滑处理等。
总结起来,粒子群优化算法在路径规划中具有很多优点。它是一种并行的优化算法,可以处理大规模问题,并加快路径规划的速度。同时,粒子群算法具有较强的全局搜索能力,可以找到最优解或接近最优解。此外,粒子群算法还具有自适应性,可以根据动态环境的变化调整搜索方向和速度。
通过将粒子群优化算法应用到路径规划中,我们可以在任意地图上创建和保存路径规划,同时可以根据实际情况随时更改起点和终点的位置。以上便是基于粒子群优化的路径规划算法的基本步骤和思想。希望这篇文章对你有所帮助,对于理解和应用路径规划算法有所启发。
【相关代码 程序地址】: http://nodep.cn/729939933423.html















 1370
1370











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









