






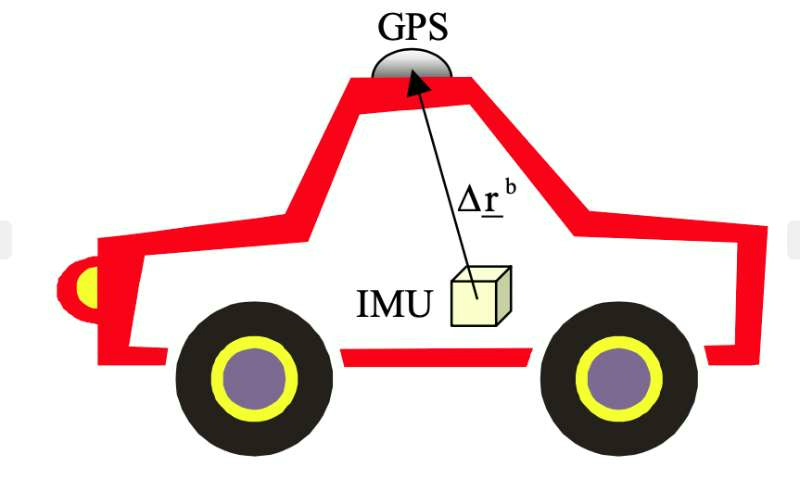
自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程 , 本商品在已知GNSS/GPS到车体坐标系的外参前提下,根据GNSS/GPS的定位信息与IMU信息完成IMU到GNSS/GPS 的外参标定,并进一步获得IMU到车体坐标系的外参标定。
本商品提供两种标定模式:车辆直线运动及自由运动,这两种模式下的注释工程代码。
ID:97100700336617450
肥糯糯的老娘

自动驾驶技术是当今车辆行业的热门话题之一。随着技术的不断发展,很多汽车生产商和科技公司都投入了大量资源用于研究和开发自动驾驶系统。其中,多传感器联合标定是实现自动驾驶的关键技术之一。本文将围绕"自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程"展开讨论。
在自动驾驶系统中,IMU(惯性测量单元)是至关重要的传感器之一。它可以测量车辆的加速度和角速度等信息。然而,IMU的数据是相对于传感器本身的坐标系而言的,而在自动驾驶系统中,我们通常需要将IMU的数据转换到车体坐标系中。因此,IMU到车体坐标系的标定工程就成为了实现自动驾驶系统的必要环节。
本文提供了两种标定模式:车辆直线运动和自由运动。在车辆直线运动模式下,我们可以利用车辆进行直线行驶时的GNSS(全球导航卫星系统)GPS定位信息和IMU数据进行标定。通过分析车辆的运动轨迹和IMU的测量数据,我们可以得到IMU到GNSS GPS的外参标定结果。进一步,结合已知的GNSS GPS到车体坐标系的外参信息,我们还可以获得IMU到车体坐标系的外参标定结果。这样,我们就能够准确地将IMU的数据转换到车体坐标系中,为后续的自动驾驶算法提供可靠的输入。
另一种标定模式是自由运动模式。在自由运动模式下,我们不限制车辆的运动轨迹,而是让车辆按照自己的行驶习惯进行行驶。通过分析车辆的运动轨迹和IMU的数据,我们可以得到IMU到GNSS GPS的外参标定结果。同样地,结合已知的GNSS GPS到车体坐标系的外参信息,我们还可以获得IMU到车体坐标系的外参标定结果。这种模式更加贴近实际的行驶情况,可以提高标定结果的准确性。
为了帮助读者更好地理解标定流程,本文提供了注释工程代码。这些代码展示了如何使用车辆直线运动和自由运动两种模式进行IMU到车体坐标系的标定。读者可以根据自己的需求选择适合的模式,并参考代码实例进行标定工作。
总结起来,本文围绕"自动驾驶多传感器联合标定系列之IMU到车体坐标系的标定工程"展开了详细的技术分析。通过分析车辆的运动轨迹和IMU的测量数据,在已知GNSS GPS到车体坐标系的外参的前提下,我们可以完成IMU到GNSS GPS的外参标定,并进一步获得IMU到车体坐标系的外参标定。本文还提供了注释工程代码,帮助读者更好地理解标定流程并进行实际操作。在实现自动驾驶系统的过程中,多传感器联合标定是至关重要的环节,希望本文对读者有所帮助。
【相关代码 程序地址】: http://nodep.cn/700336617450.html















 261
261











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









