







 本文介绍了自动驾驶车辆中组合导航的原理,通过Novatel等产品的高精度定位信息进行车体坐标系和IMU坐标系的标定。讨论了轨迹相似性、航位推算及车速源选择,重点分析了标定效果,特别是pitch角的标定挑战。
本文介绍了自动驾驶车辆中组合导航的原理,通过Novatel等产品的高精度定位信息进行车体坐标系和IMU坐标系的标定。讨论了轨迹相似性、航位推算及车速源选择,重点分析了标定效果,特别是pitch角的标定挑战。
0. 说明
本文部分参考这篇文章,本文相关公式不清晰可以去看这篇博客。
1. 组合导航产品介绍
自动驾驶车辆一般会装有有GNSS/INS组合导航器件,比如NOVATEL,导远这些公司的产品。它可以提供高精度的车辆定位信息。组合定位系统的相关知识可以参考组合定位系统。

我们这里IMU和车体坐标系的标定,就用到了组合导航给出的高精度位姿信息。注意:不同的组合导航产品可能输出位置的参考坐标系不同,在编程的时候也要注意坐标系统一。比如我使用的novatel产品输出的位置信息是在WGS84坐标系下,应该把它转换到ENU导航坐标系。相应坐标系转换可以参考这里。
2. 标定原理
一方面,我们通过novatel得到厘米级定位信息,可以获得车辆的运行轨迹“真值”。另一方面,我们也可以通过车速,IMU和车体之间的安装角误差以及novatel得到的IMU到导航系的位姿得到车辆运行轨迹在导航系下的表示。
显然,在各项系数都标定完毕,且忽略一些误差的情况下,两个轨迹应该是重合的。详细情况会在后面讲到。
3. 轨迹相似性原理
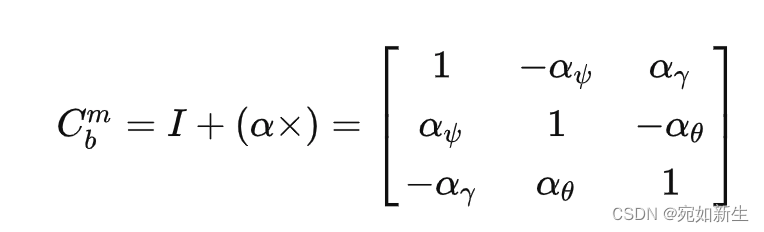
假设车体坐标系为m系,IMU系为b系,两者之间有较小的安装角误差。两者之间的外参可以如下表示:
另外,里程计的测量中还可能存在刻度系数误差
δ
K
D
\delta K_D
δKD,其输出速度大小
v
~
\tilde{v}
v~与理论速度大小
υ
\upsilon
υ之间的关系为: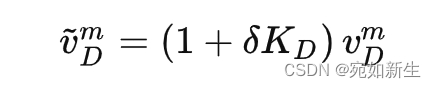
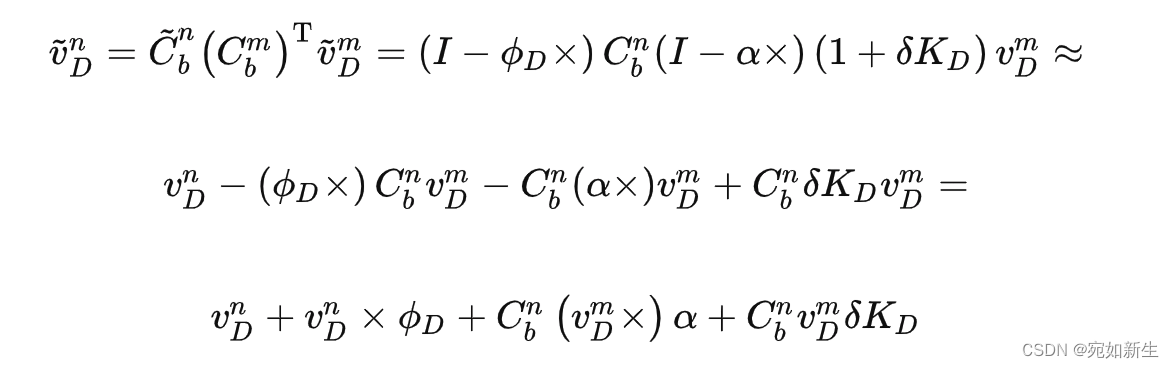
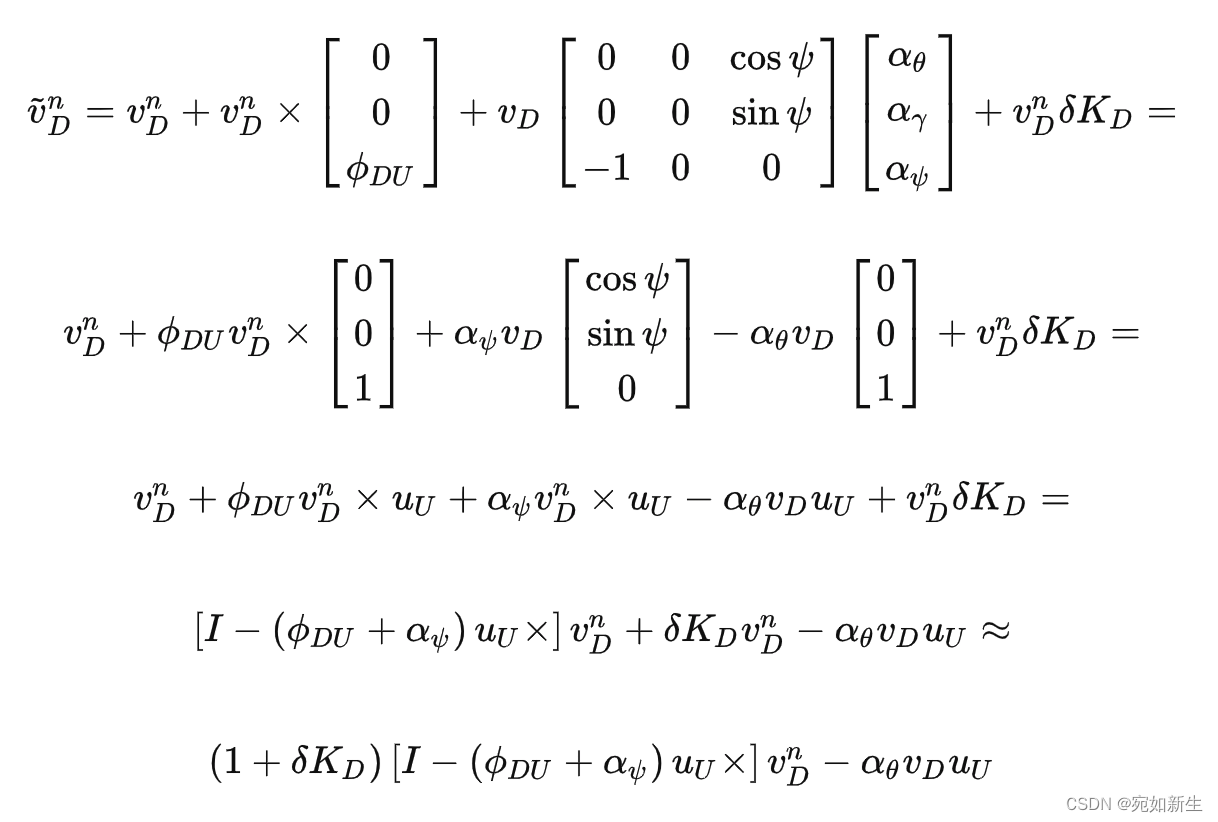
所以,在导航坐标系中里程计的实际速度输出应该为:
由于车辆只有前向速度,所以
υ
D
m
\upsilon^m_D
υDm = 0,
υ
D
\upsilon_D
υD, 0,重新整理公式得:
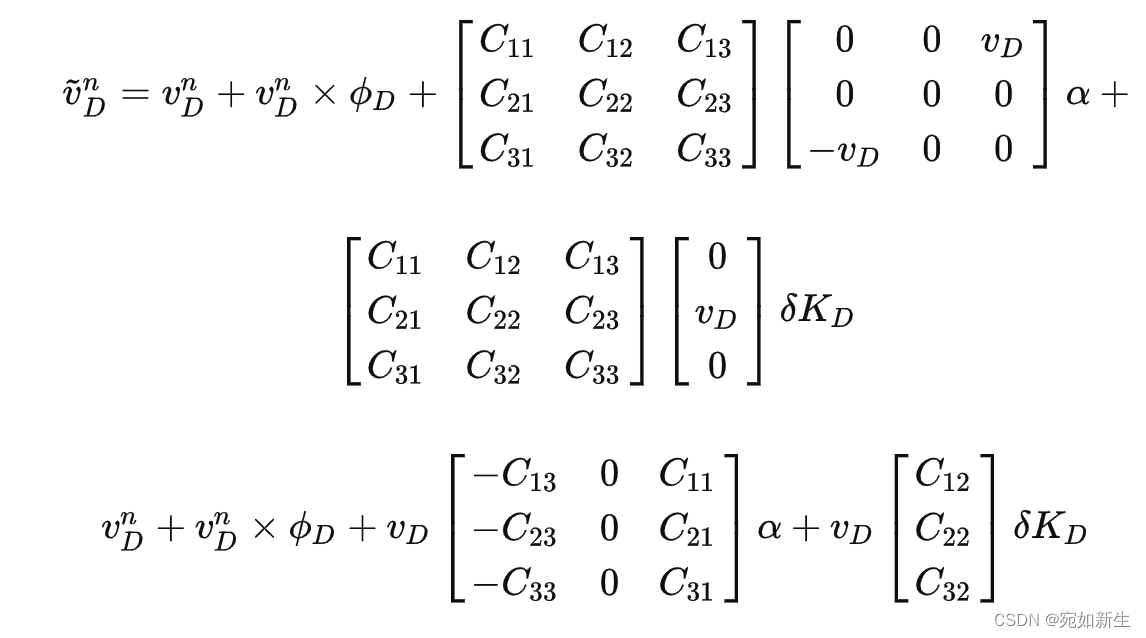
从上式可以得出,翻滚角不影响里程计的测量值。
3.1 航位推算
假设车辆在行驶中水平的姿态角很小。
对上式进行积分,可以得到位置方程:

可以看到,上式包含里程计的刻度因子,组合导航的姿态失准角,IMU到车身的安装角(pitch和yaw),理论上可以标定这几个参数。我们忽略组合导航的姿态失准角,便可以标定IMU到车身的安装角以及里程计的刻度因子。
3.2 轨迹相似的可视化
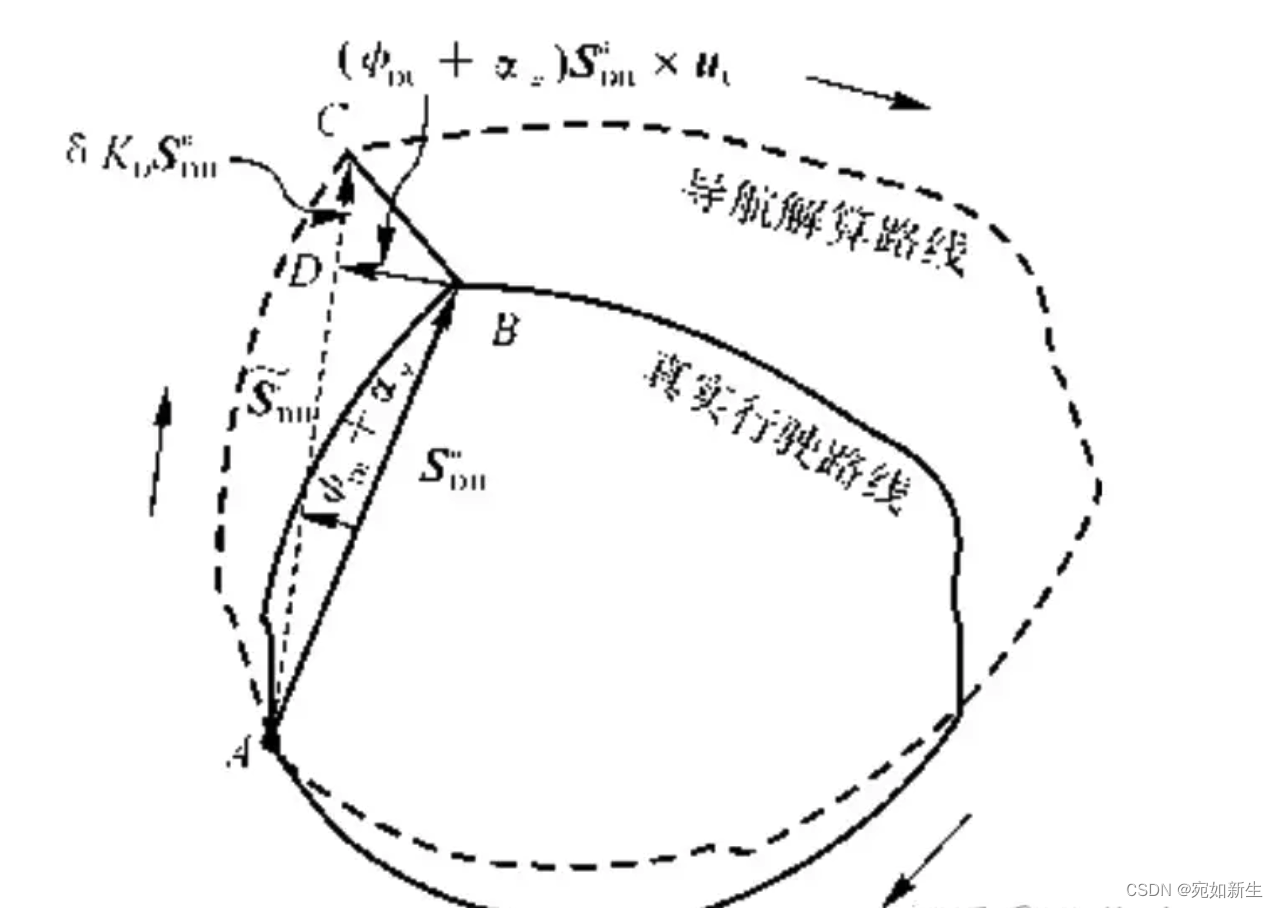
可见,真实轨迹和解算轨迹相差一个旋转以及缩放因子。
两点说明:
- 缩放是有里程计刻度因子导致;
- 相对旋转有导航姿态失准角以及IMU和车身安装角导致;
4. 选择车速源
那我们的车辆速度选择什么来源呢?一个是轮速计,但是他会有刻度因子标定的问题,会把误差引入到我们安装角估计当中来;再就是可以使用NHC(车辆约束假设),这里参考了武汉大学多源智能导航实验室的一篇论文。论文在这。
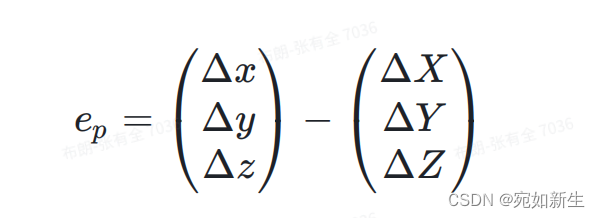
基于NHC假设,我们可以将GNSS观测的速度(GNSS处于固定解状态时)取模,当做车辆的前向速度,这样就不用估计里程计的刻度因子了。
这样的话,我们就可以用novatel给出的轨迹“真值”和DR轨迹作差,得到误差方程了。
5. 标定效果
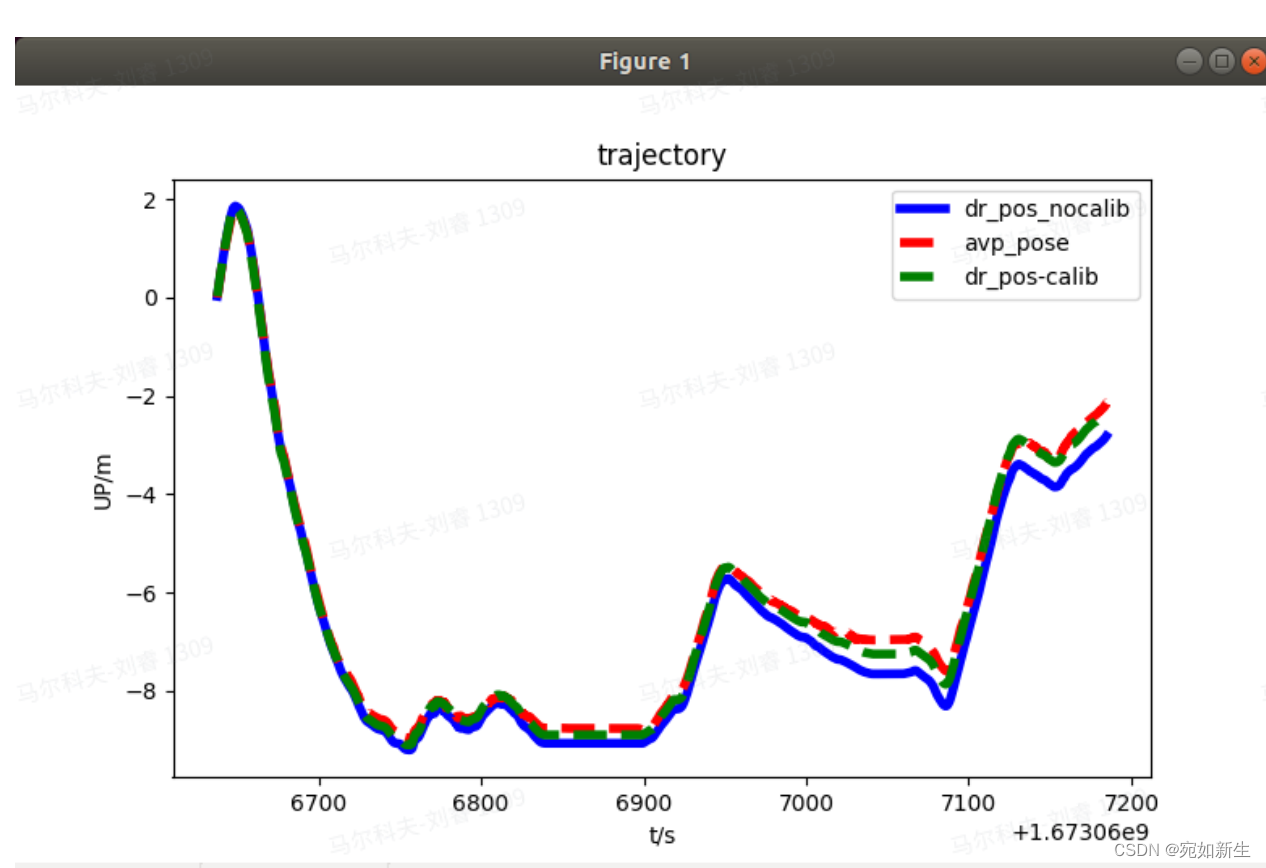
上图是高程上反应pitch角标定的效果。
下面是分别给pitch和yaw角添加了5度的偏差,看能否标回来。可以看到yaw角能标定回来,pitch角标定效果较差。




最后一张放大图表明车辆频繁上下坡会显著降低pitch的标定精度。



















 2222
2222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











