







来源:
https://www.guokr.com/article/5292/
http://www.360doc.com/content/16/0902/11/1286300_587730834.shtml
http://www.elecfans.com/kongzhijishu/sifuyukongzhi/534214_a.html
- 舵机和步进电机原理一样吗?
- 舵机的控制信号?
舵机原理
1.舵机和步进电机的不同
- 舵机有三条引出线:Ground(0 v)、Power(+5 v)、Control(PWM)
- 步进电机:4-6根不等的引出线
- 舵机的角度控制一般受限:90 180 270度,也有360度连续旋转的,但是不能控制每次转动的角度。
- 驱动力不同。
- 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。那么就需要驱动器来接收脉冲信号并转化为步进电机的角位移,当然还需要要发送脉冲的控制器或者PLC,还需要给控制器或者驱动器供电的开关电源等
- 在非超载的情况下,步进电机的转速、停止的位置只取决于控制脉冲信号的频率(速度)和脉冲数(角度)。
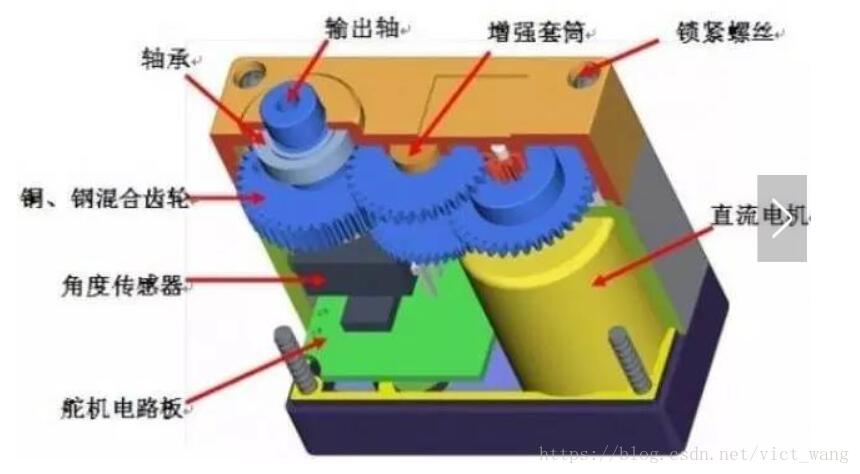
2.舵机的内部结构
舵机和步进电机的动力是有着很大区别的,舵机的驱动力来自——直流电机,通过变速齿轮的传动和变速,将动力传输到输出轴,同时,舵机内部都设有角度传感器和控制电路板,用来参与舵机的转动角度的控制和信号的反馈检测工作。
位置检测器(角度传感器)是它的输入传感器,舵机转动的位置变化,位置检测器的电阻值就会跟着变化。通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转
3.原理(闭环检测机制)
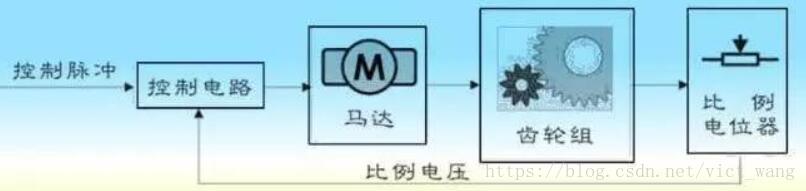
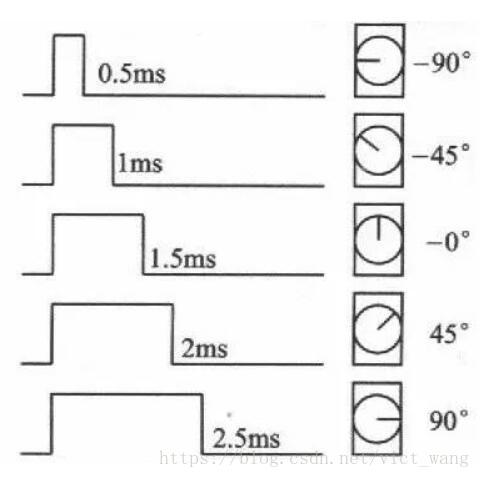
舵机的控制信号:脉宽调制(PWM)信号,如下图,直观反映了PWM信号和舵机转动角度的关系,你也可以简单的理解为,通过给舵机通电的时间控制,结合角度传感器的反馈信号检测和控制,实现了舵机的精确角度控制。
4.舵机的控制
内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
- 舵机的追随特性
假设现在舵机稳定在A点,这时候CPU发出一个PWM信号,舵机全速由A点转向B点,在这个过程中需要一段时间,舵机才能运动到B点。
舵机的原理和控制
保持时间为Tw
当Tw≥△T时,舵机能够到达目标,并有剩余时间;
当Tw≤△T时,舵机不能到达目标;
理论上:当Tw=△T时,系统最连贯,而且舵机运动的最快。
实际过程中w不尽相同,连贯运动时的极限△T比较难以计算出来。
假如我们的舵机1DIV =8us,当PWM信号以最小变化量即(1DIV=8us)依次变化时,舵机的分辨率最高,但是速度会减慢。
360度舵机和普通舵机有什么区别呢?所有的舵机(特殊定制舵机除外)都是由PWM控制的。 舵机控制板输出的是PWM信号,所以舵机控制板都可以控制180度和360度舵机。 360度舵机是PWM控制它的旋转速度和旋转方向,500-1500us的PWM是控制它正转,值越小,旋转速度越大;1500-2500us的PWM是它反转,值越大,旋转速度越大。1500us的PWM是控制它停止。(由于每一个舵机的中位可能会不一样,所以有些舵机可能是1520us的PWM,舵机才会停下来。所以需要自己实际测试出舵机的中位。) 360度舵机就是一个普通的直流电机+一个电机驱动板的组合,所以它只能连续旋转,不能定位,也没法知道它的角度和圈数(除非自己在舵机外面加装其它传感器)。 180度舵机是PWM控制它的旋转角度,500-2500us的PWM对应控制180度舵机的0-180度,是一一对应的,一个PWM值对应舵机的一个角度。 |
步进电机
参数:
1.相数:N 相步进电机有 N 个绕组,这 N 个绕组要均匀地镶嵌在定子上,因此定子的磁极数必定是 N 的整数倍,因此,转子转一圈的步数应该是 N 的整数倍
2.驱动方式:相序方式
3.步距角:
4.最大空载牵出频率:
5.最大空载牵入频率:
6.牵入转距:
7.自定位转矩:

















 1052
1052

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









