







直线电机(DDL)是一种将电能直接转换成直线运动机械能,而不需要任何中间转换机构的传动装置。
直线电机选型及接线
机型直线电机选型时应根据负载所需要的连续推力及最大速度参数来选择合适的电机,并根据电机的连续电流来选择相应的伺服驱动器。注意确认驱动器型号标识是DL型,确保选型正确。驱动器接线参考用户手册,按照要求操作。
因为直线电机位置反馈所需的直线编码器,通常不能与汇川驱动器编码器接口CN2直连,所以需要S6-T5-0.0编码器信号转接盒配合使用,如下所示:
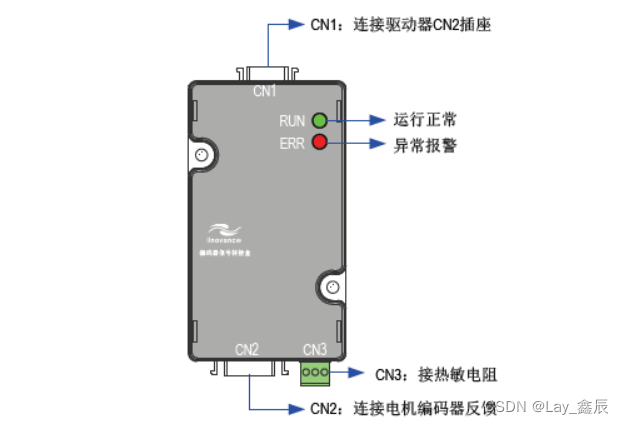
接线盒CN1与CN2端子针脚定义不同,所以必须参考用户手册编码器接线内容,配合编码器说明书进行接线。因为端口针脚距离密集,建议接线完成后用万用表蜂鸣档检测接线是否存在短路虚焊等情况,否则驱动器易出现Er.208、Er.740故障。
注意端子针脚序号,避免漏接、错接。
直线电机调试流程
1.后台软件安装与数据库选择
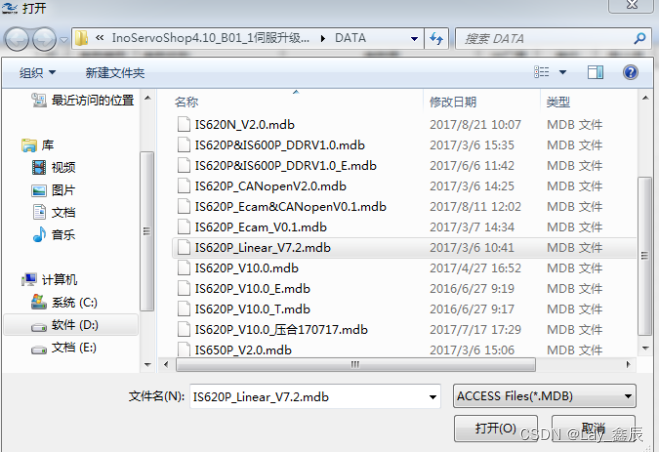
下载安装汇川伺服后台软件InoServoShop4.10,在参数管理项目中选择打开数据库,根据驱动器选择文件,例如IS620P型驱动器选择IS620P_Linear_V7.2.mdb 并打开。
2.驱动器上电及故障处理
检查外围接线是否正确,确认后驱动器进行上电操作。
面板进行恢复参数出厂设置H02-31=1,点击搜索串口设备,显示已连接状态。连接不上检查接线,是否存在松动。
如在上电后出现Er740编码器故障,检查编码器接线是否正确,并重新进行上电。如排查接线后故障仍未排除,设置H0D-04=1,进行细分盒数据写入,设置H0D-04=2,通过H0B-31 查询故障子码,排除故障。
3.设置电机参数
注意点:
因为直线电机参数命名与旋转电机存在差异,如H0014和H0015在直线电机里的单位为mm/s,而不是rpm.在直线电机参数里凡是和速度相关的,单位均为mm/s,而不是rpm;
还需注意在通过电机说明书获取参数时,因为命名习惯问题,参数名称并非全部一致,如H00-23电气常数有的生产厂家会命名为电机常数,建议可以参考单位进行参数辨识。
在输入电机参数时注意单位换算,确保换算倍数正确。
a、首先需在后台软件中把H0241=1430写进驱动器,该参数为厂家密码。才能进行下一步工作;
b、根据现场DDL线电阻、线电感值,设置H00-18~H00-20及H00-11(DDL额定电流设置需注意,过大可能会烧毁电机)。根据现场情况设置H00组其他参数,如图:
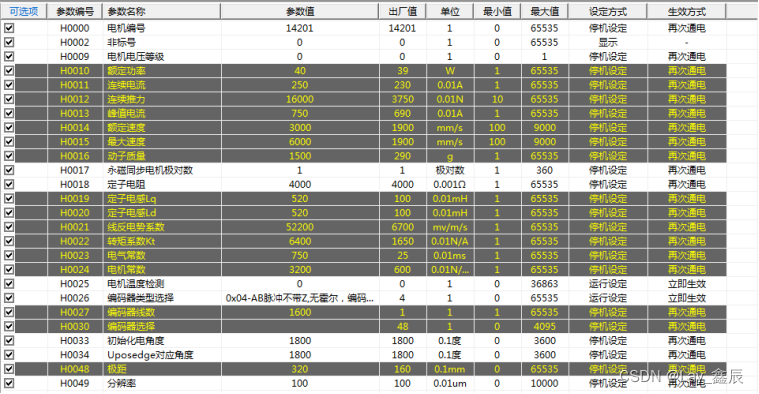
c、电机型号H00-00设置为14201,H00-30编码器类型选择直线光栅尺;
d、根据光栅尺类型设置参数
模拟量型光栅尺:需设置H00-27(编码器线数),含义为N-N中对应的正弦波周期数;
脉冲型光栅尺:需设置H00-49(分辨率),含义为脉冲型编码器的分辨率;
e、设置H00-48(直线电机极距N-S间的距离),应确定电机说明书所给参数是N-N间距离还是N-S距离。通过后台将参数写入驱动器。
4.H01组参数设置
a、根据驱动器型号设置H01-02至H01-08;
b、如果已知电流环参数,则把电流环参数写入到H01组参数(H01-2228、H01-44、H01-5255),如电流环参数未知,进行电流环参数自调谐,步骤如下:
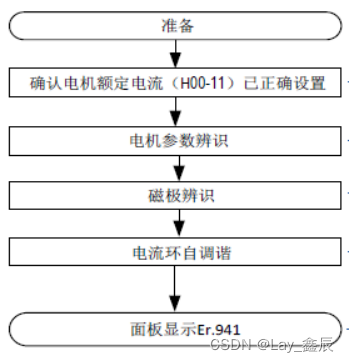
在确认已正确设置电机额定电流后,再进行电机参数辨识:选择电流注入法磁极辨识方式H0A-13=5,打开电机参数辨识功能H09-27=1,使能辨识H0D-03=1;
磁极辨识:选择预定位法或者微动法H0A-13=0 或1,使能辨识H0D-03=1;
最后进行电流环自调谐:使能自调谐H0D-06=1;
辨识过程中,驱动器面板显示当前辨识状态,辨识完成后面板显示Er.941,重新上电即可。
5.将电机参数写入细分盒
设置H0D-04 为1,将电机参数写入细分盒中,当H0D-04 功能码由1 变成0 时表示写入成功,会报错Er941,重新上电即可;
如果H0D-04 由1 变成3 则表示写入失败,需要重新上电之后,多次重复写入指令,直至写入成功。
6.磁极辨识
a、选择辨识方式微动法H0A-13=1或预定位法H0A-13=0;
b、相序辨识功能默认打开H0A-07=1,使能磁极辨识H0D-03=1进行磁极辨识;
Er220相序错误 调整动力线UVW两项线序,重新辨识;
Er602 磁极辨识失败 检查电机极距H00-48、光栅分辨率H00-49设置是否正确,重新上电重复操作。如果最终辨识通过,则动力线相序接线无误。辨识完成后,关闭相序辨识功(H0A-07=0)。
7.进行速度JOG点动
在面板进入H0D-11功能码,进入设置JOG速度(为保证调试安全,根据现场情况设置,在低速下点动),按SET进入,按上、下键进行正、负位置控制。
常见故障及处理方法:
Er630(电机堵转,JOG过程中电机动子运动一段距离后卡死)
首先检查电机机械结构是否存在故障,如无误再检查极距和分辨率两个功能码设置是否正确,修改后重新上电进行测试;
测试过程中有尖锐声响及震动
首先检查电机电阻和电感参数,H00-18/H00-20参数设置是否正确,再调整电流环参数,重新上电测试。JOG点动成功进入下一步骤。
8.根据细分后的脉冲正确设置电子齿轮比
在伺服后台中,分子默认为脉冲数1048576,分母应设置为走完N-N距离需发送的脉冲数。
注意当H05-02 ≠ 0 时,此时电子齿轮比与H05-07、H05-09、H05-11、H05-13 无关。电子齿轮比设置不当,会出现ErB03故障,应重新设置分母。
惯量辨识及增益参数调整
电机在速度JOG完成后要进行惯量辨识和增益参数的设置,使其工作状态更加精确。
1.惯量辨识
自动增益调整或手动增益调整前需进行惯量辨识,以得到真实的负载惯量比。
首先进行惯量估计及确认H09-09行程能否满足测试要求,如不能请调整。设设置H09-00=2,刚性自动调节。进入H0D-02,持续按向上键,电机正转后反转,往复运动,松开按键则自由停机。面板显示当前辨识的惯量比。
如果负载惯量没有发生变化,可以增大惯量比H08-15并设置 H09-05=1重复上述动作。惯量比反复变化多次后显示惯量比是否趋于固定后,持续按SET键,至面板显示“SAVE”,辨识出的惯量比将会写入到 H08-15中。
测试过程中如果仍有振动可以降低刚性,在有共振的状况下可以使用陷波器,抑制共振频率。
若仍不满足使用条件,可以进行手动增益微调。
2.手动增益微调
将H09-00设置为0,调整H08-00,H08-01,H08-02,H07-05,H08-18,H08-19,H08-20,H08-21,H08-22等参数。方法如下:
H08-00决定速度环的响应,设定的越大,对速度指令的跟随性就越好,速度的抗扰性也越好。但过大的设定会引起机械共振。
H0801可以消除净差,积分时间常数越小,积分效果越强。但是过小的积分时间常数会引起系统不稳定。
建议速度积分时间常数和速度比例满足以下关系:
H0802 决定位置环的响应,设定的越大,对位置指令的跟随性越好,随动偏差越小,定位时间也会缩短。但过大的设定会使机械发生共振或过冲。
H0705设定转矩指令的一阶低通滤波器,通过降低转矩的响应,可抑制高频段的振动和噪声。但是因为转矩环的响应必须远大于速度环的响应,转矩指令滤波时间不能太大,否则会引起控制系统不稳定。
建议转矩指令滤波时间和速度环比例增益满足以下的关系:
H0819和H0818 速度前馈指不经过位置环运算,直接把位置指令的微分叠加到速度指令上。可以降低位置跟随过程中的随动偏差,缩短定位时间。
一般设为30%~60%, 速度前馈滤波时间可以降低设置速度前馈后的噪声
调试流程可参考一下步骤:
a、参数调整可以从默认参数开始调试,先只调试速度环增益参数,以当前增益为基准,每次增大50%,直至运行时机械有微震再稍微减小速度环增益;
b、调整位置环增益,同样地以当前值为基准,增大或减小50%;
c、如果有过冲即超调现象,再减弱积分作用,加大积分时间!
d、选择适当的刚性等级,数值越大则刚性越强,数值越小刚性越弱。
伺服多段位置运动检测调试效果
在完成电机调试后,可以在后台设置多段位指令,电机往复运动,检测系统性能,具体步骤如下:
H02-00=1 控制模式选择--位置控制
H05-00=2 主位置指令A来源--多段位置指令给定
H11-00=1多段位置运行方式--循环运行
H11-01 位移指令终点段数选择2段
H11-12 第一段移动位移H11-14 第一段位移最大运行速度-
H11-15 第一段位移加减速时间
H11-16 第一段位移完成后等待时间
H11-17第二段移动位移 (由于为往返运行,注意负号)
H11-19第二段位移最大运行速度
H11-20 第二段位移加减速时间
H11-21 第二段位移完成后等待时间关闭
03组DI功能,选择虚拟DI
H17-00=1 伺服使能
H17-01=28 多段位置使能
H0C-09=1 通讯虚拟VDI使能状态
注意:
多段位置指令位移和速度按照实际情况进行设置,速度可以逐渐上升,保证调试安全;
因为是循环往复运动,注意两端位置参数符号应相反;
使用虚拟VDI时,首先将1写入H31-00进行伺服使能,再另H31-00=3,进行两端位置往复运动。在停机时,首先设置H31-00=1,电机处于使能状态,再写入0,使其停止。

















 848
848

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









