







资源下载: https://download.csdn.net/download/vvoennvv/89466053
分类算法资源合集: https://download.csdn.net/download/vvoennvv/89466519
目录
Matlab PSO-BP 基于粒子群算法优化BP神经网络的分类算法
Matlab GA-BP 基于遗传算法优化BP神经网络的分类算法
Matlab CNN-LSTM分类 卷积神经网络-长短期记忆神经网络组合模型
一,概述
基于遗传算法优化BP神经网络 (GA-BP) 的数据时序预测是一种常用的机器学习方法,用于预测时间序列数据的趋势和未来值。
在使用这种方法之前,需要将时间序列数据转化为适合BP神经网络处理的形式。常用的方法是将时间序列数据转化为滞后观测值的矩阵形式,以便将其作为BP神经网络的输入。
然后,使用遗传算法对BP神经网络的权重和阈值进行优化。遗传算法通过模拟自然选择和遗传机制,使用种群中的个体来表示网络权重和阈值的不同组合。通过计算每个个体的适应度,根据适应度选择和交叉繁殖优秀的个体,并引入变异操作以增加种群的多样性。这个过程通过多次迭代,逐步优化网络的权重和阈值,使其能够更好地拟合时间序列数据的特征和趋势。
最后,使用优化后的GA-BP神经网络进行数据时序预测。通过将过去的时间序列数据传递给网络,网络将根据优化后的权重和阈值进行计算,并预测未来的数值。优化后的网络能够更准确地捕捉时间序列数据中的趋势和周期性,并提供更精确的预测结果。
综上所述,基于遗传算法优化BP神经网络的数据时序预测方法能够结合遗传算法的优化能力和BP神经网络的非线性拟合能力,实现更准确和可靠的时间序列预测。这种方法在各种时间序列预测问题中都有广泛的应用,例如股票价格预测、气象数据预测等。
二,代码
代码中文注释非常清晰,按照示例数据修改格式,替换数据集即可运行,数据集为excel。
部分代码示例如下:
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行
%% 导入数据
res = xlsread('数据集.xlsx');
%% 添加路径
addpath('goat\')
%% 分析数据
num_class = length(unique(res(:, end))); % 类别数(Excel最后一列放类别)
num_res = size(res, 1); % 样本数(每一行,是一个样本)
num_size = 0.7; % 训练集占数据集的比例
res = res(randperm(num_res), :); % 打乱数据集(不打乱数据时,注释该行)
flag_conusion = 1; % 标志位为1,打开混淆矩阵(要求2018版本及以上)
%% 设置变量存储数据
P_train = []; P_test = [];
T_train = []; T_test = [];
%% 划分数据集
for i = 1 : num_class
mid_res = res((res(:, end) == i), :); % 循环取出不同类别的样本
mid_size = size(mid_res, 1); % 得到不同类别样本个数
mid_tiran = round(num_size * mid_size); % 得到该类别的训练样本个数
P_train = [P_train; mid_res(1: mid_tiran, 1: end - 1)]; % 训练集输入
T_train = [T_train; mid_res(1: mid_tiran, end)]; % 训练集输出
P_test = [P_test; mid_res(mid_tiran + 1: end, 1: end - 1)]; % 测试集输入
T_test = [T_test; mid_res(mid_tiran + 1: end, end)]; % 测试集输出
end
%% 数据转置
P_train = P_train'; P_test = P_test';
T_train = T_train'; T_test = T_test';
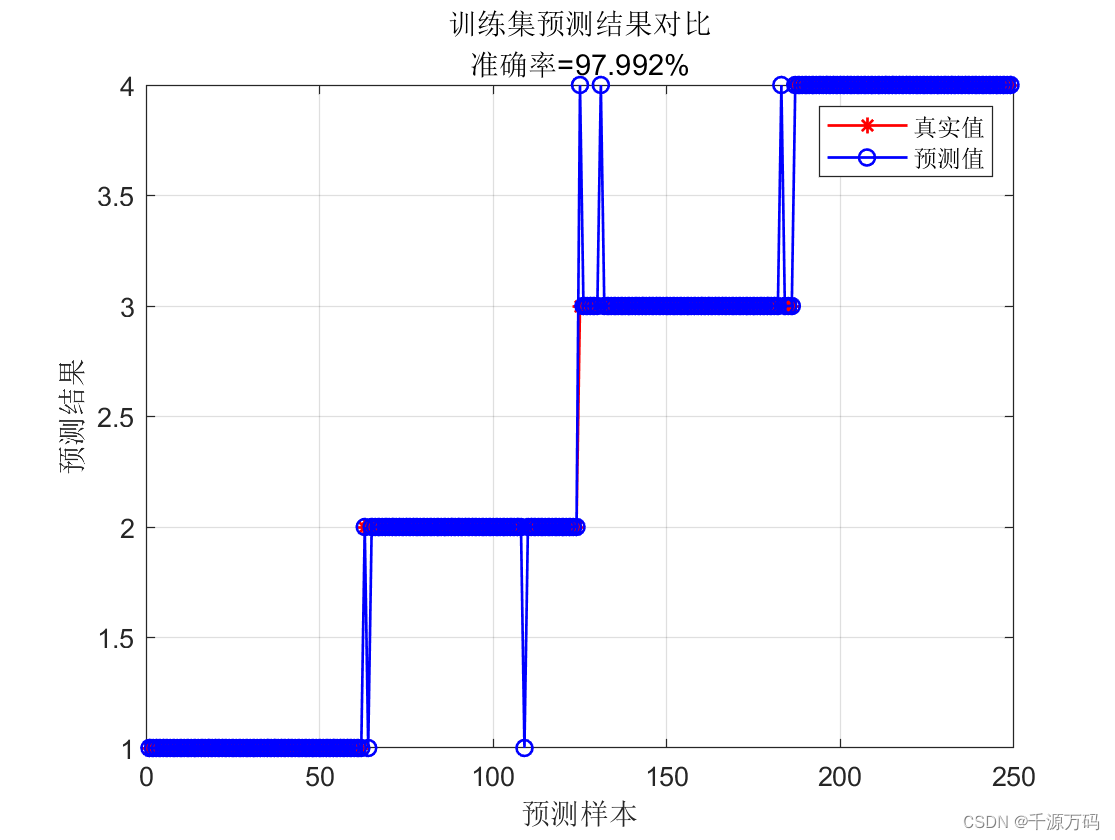
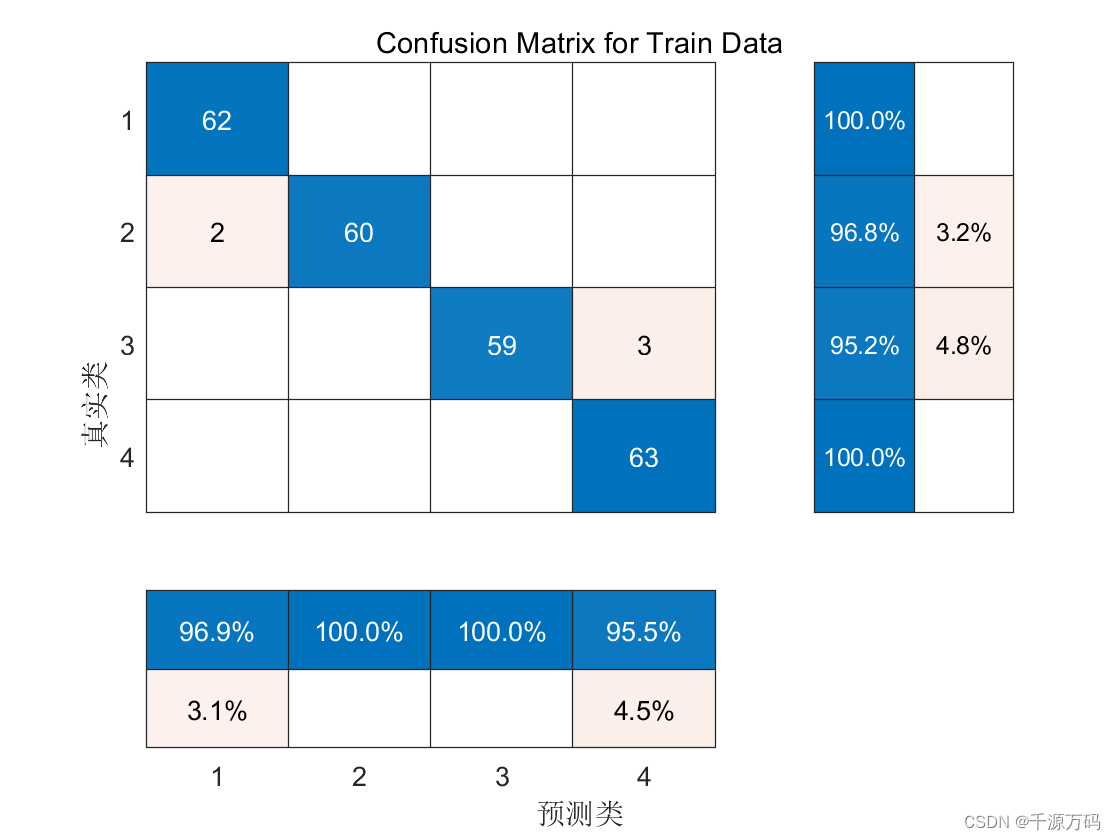
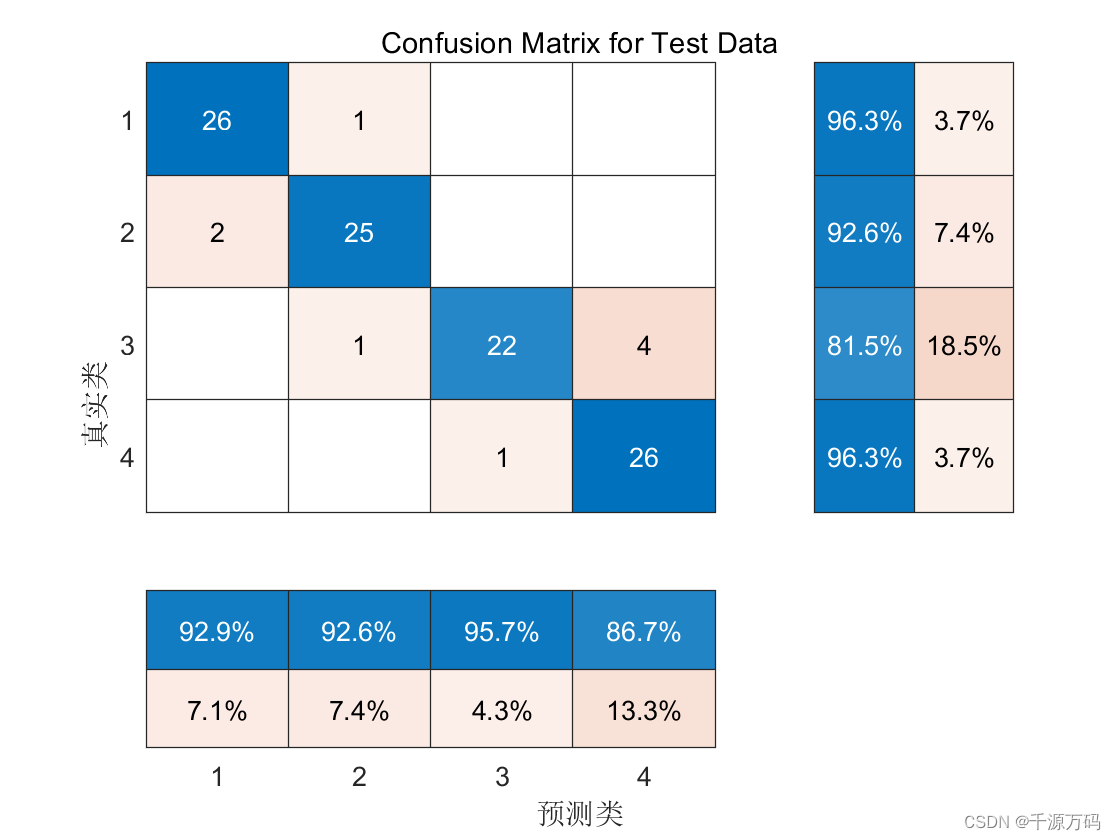
......三,运行结果

















 681
681











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











