







一、gaussian-splatting/submodules/diff-gaussian-rasterization/ext.cpp
#include <torch/extension.h>
#include "rasterize_points.h"
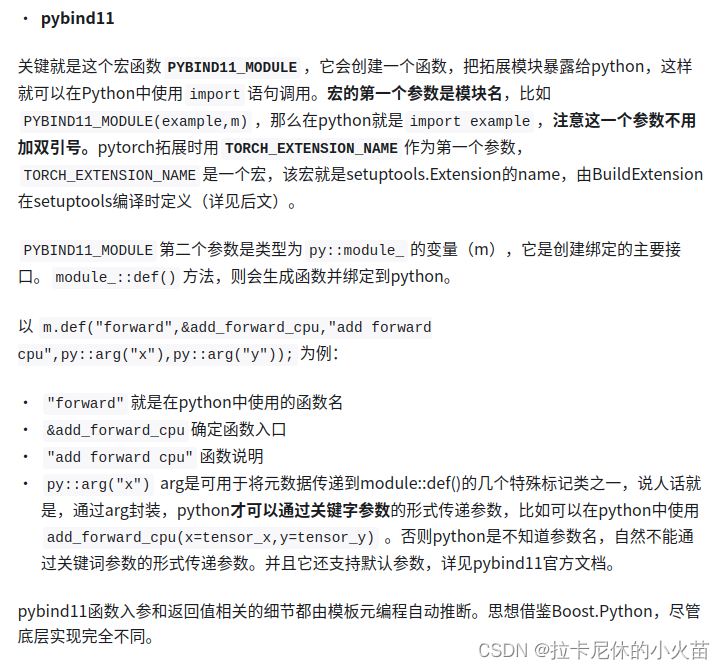
PYBIND11_MODULE(TORCH_EXTENSION_NAME, m) {
m.def("rasterize_gaussians", &RasterizeGaussiansCUDA);
m.def("rasterize_gaussians_backward", &RasterizeGaussiansBackwardCUDA);
m.def("mark_visible", &markVisible);
}
先看ext.cpp,这里定义了将RasterizeGaussiansCUDA、RasterizeGaussiansBackwardCUDA、markVisible重定向到python可以识别到的rasterize_gaussians、rasterize_gaussians_backward、mark_visible。
二、gaussian-splatting/submodules/diff-gaussian-rasterization/rasterize_points.cu
这里就是把cuda实现的forward和backward用包了一下,同时输入变成了torch::Tensor,同时也做了一些把torch::Tensor转换成cuda显存指针操作。
2.1 RasterizeGaussiansCUDA(forward)
- 初始化一些变量:3D gaussian 个数、图像H、W
- 初始化显存:out_color、radii、geomBuffer、binningBuffer、imgBuffer
这里是把初始化显存写成了callback函数了:
std::function<char*(size_t)> geomFunc = resizeFunctional(geomBuffer);
std::function<char*(size_t)> binningFunc = resizeFunctional(binningBuffer);
std::function<char*(size_t)> imgFunc = resizeFunctional(imgBuffer);
std::function<char*(size_t N)> resizeFunctional(torch::Tensor& t) {
auto lambda = [&t](size_t N) {
t.resize_({(long long)N});
return reinterpret_cast<char*>(t.contiguous().data_ptr());
};
return lambda;
}
写的非常巧妙。
- 最后调用cuda实现:CudaRasterizer::Rasterizer::forward
RasterizeGaussiansBackwardCUDA(backward)
- 同样初始化一些tensor
- 再调用CudaRasterizer::Rasterizer::backward,只不过这里没用callback
三、gaussian-splatting/submodules/diff-gaussian-rasterization/diff_gaussian_rasterization/init.py
这里是对pybind调用的接口做了二次封装,同时继承pytorch自动求导模块,使得可以在pytorch框架中实现自动forward和backward。
3.1 _RasterizeGaussians
3.1.1 forward
在看代码前我们先学习下pytorch中的context
pytroch中ctx和self的区别
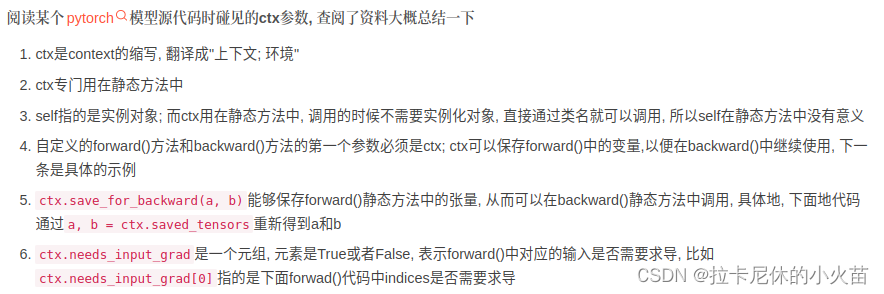
ctx可以简单理解为pytorch torch.autograd.Function内部的一个更高级、包含保存和恢复tensor的self。
# Keep relevant tensors for backward
ctx.raster_settings = raster_settings
ctx.num_rendered = num_rendered
ctx.save_for_backward(colors_precomp, means3D, scales, rotations, cov3Ds_precomp, radii, sh, geomBuffer, binningBuffer, imgBuffer)
forward的同时,保存了中间变量用于后面backward。
3.1.2 backward
# Restore necessary values from context
num_rendered = ctx.num_rendered
raster_settings = ctx.raster_settings
colors_precomp, means3D, scales, rotations, cov3Ds_precomp, radii, sh, geomBuffer, binningBuffer, imgBuffer = ctx.saved_tensors
先恢复forward保存的tensor
再调用_C.rasterize_gaussians_backward(*args) pybind生成的c++接口,最后返回梯度。
3.2 rasterize_gaussians
相当与对3.1的RasterizeGaussians又包了一层,直接调用torch.autograd.Function的apply接口,简单理解就是同时跑了forward和backward
3.3 GaussianRasterizer
这个才是最外层python代码会调用到的模块,继承了nn.Module,这里主要看一下forward函数
这里讲一下输入参数:
● means3D:输入3D 高斯的center
● means2D:cuda代码并没有用到
● opacities:不透明度
● shs = None,:球谐参数,如果下面colors_precomp不为空,则shs可以为空
● colors_precomp = None, 颜色如果上面shs不为空,则可以为空,会重新根据shs创建
● scales = None:3D gaussian的eigen value或者轴长,只有cov3D_precomp不为空,他才可以为空
● rotations = None:3D gaussian的旋转,只有cov3D_precomp不为空,他才可以为空
● cov3D_precomp:3D gaussian的协方差,如果为空,可以从scales和rotation中创建
四、gaussian-splatting/submodules/diff-gaussian-rasterization/setup.py
相对与python版本的cmake















 2537
2537











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









