







 超级会员免费看
超级会员免费看
磷酸铁锂电池因为平台区的存在,导致使用戴维南模型+EKF的方法时,无法对SOC准确预估。所以最近搜索了大量关于磷酸铁锂电池SOC预估的论文、期刊,但我被海量忽略客观事实、仅为了毕业的硕士论文给震惊到了。很多论文为了掩饰平台区的存在,人为伪造平台区的压差数据进行建模,有些SOC上下跳变3-8%以上(想像你开电动车时,发现剩余电量在5%上下跳变,就问你怕不怕 ) ,有些预估的OCV差异20mV以上也敢自称精度良好,而且大部分论文都不敢展示初始SOC有差异时的收敛效果。
好在最终发现一个比较靠谱的论文,总结一下供大家参考。
原文链接:
https://www.sciencedirect.com/science/article/abs/pii/S0306261923009455
原文标题:
State-of-charge estimation for onboard LiFePO4 batteries with adaptive state update in specific open-circuit-voltage ranges
注:本文除了插图为手动加入外,90%内容由国产gpt-kimi生成,只作为一般性介绍,不用作任何商业用途。转载时请也遵循此原则。
在电动汽车(EV)的快速发展中,电池管理系统(BMS)的核心功能之一是准确估算电池的剩余电量,即电池的荷电状态(State of Charge, SOC)。SOC的准确估算对于提高电池使用效率、延长电池寿命、保障行车安全至关重要。然而,现有的SOC估算方法在面对具有平坦电压-SOC关系的锂铁磷(LiFePO4)电池时,常常无法提供准确的估算结果。本文将深入解析一种新型的SOC估算方法,该方法专为解决LiFePO4电池的SOC估算难题而设计,并补充不同P, Q, R值下的测试结果。
1. 引言
LiFePO4电池因其高安全性、长寿命和低成本等优点,在电动汽车领域得到了广泛应用。但是,由于其电压-SOC曲线相对平坦,传统的基于模型的SOC估算方法难以准确反映电池的荷电状态。为了克服这一难题,研究者们提出了一种结合自适应递推平方根算法(Adaptive Recursive Square Root, ARSR)和扩展卡尔曼滤波器(Extended Kalman Filter, EKF)的新型SOC估算方法。
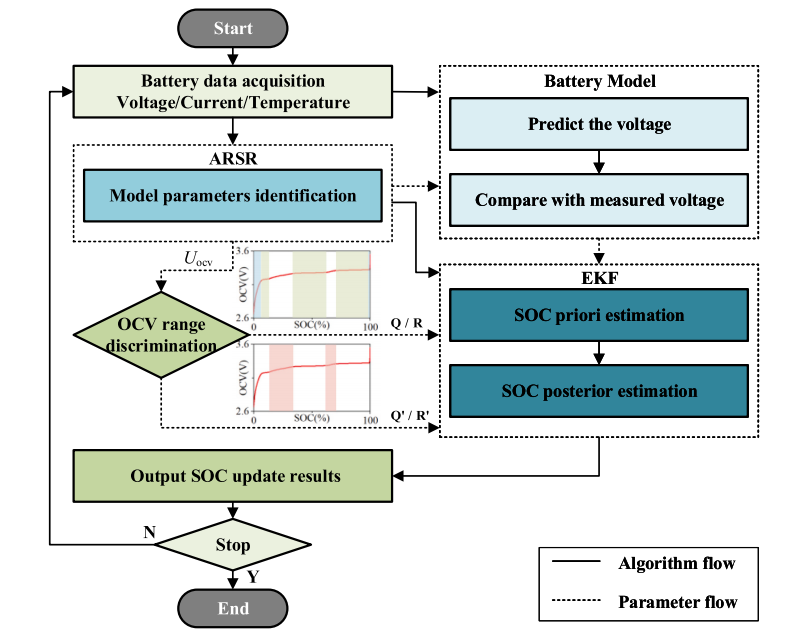
2. 新型SOC估算方法概述
该方法的核心在于两个主要的创新点:
-
自适应状态更新:根据不同的开路电压(Open Circuit Voltage, OCV)范围,采用不同的状态更新策略,以适应LiFePO4电池在不同SOC区间的特性变化。
-
参数在线识别:使用ARSR算法在线识别OCV和其他电池模型参数,然后根据识别结果自适应地更新EKF算法的参数。
3. 电池模型与参数识别
3.1 电池模型选择
本文选用了广泛认可的Thevenin等效电路模型来描述电池的电压特性。该模型包括一个电压源UOCV、一个欧姆内阻R、一个极化电阻Rp和一个极化电容Cp。
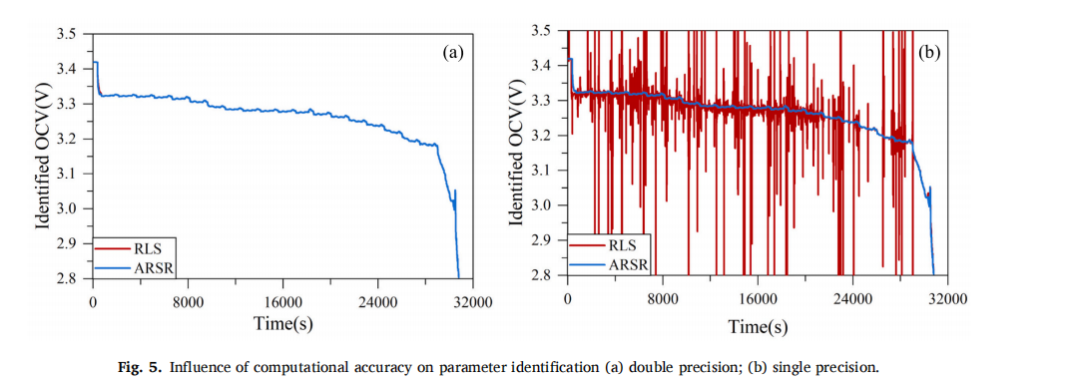
3.2 参数在线识别
由于电池管理系统(BMS)的计算精度限制,传统的递推最小二乘法(Recursive Least Squares, RLS)在参数识别时容易出现问题。为此,本文采用了ARSR算法,该算法通过分解协方差矩阵P来避免非正半定矩阵的问题,提高了参数识别的稳定性。
4. SOC更新策略
4.1 EKF算法在SOC更新中的应用
EKF算法利用模型预测电压和实测电压之间的差异来更新SOC。该过程包括先验估计和后验估计两个部分,其中涉及到状态矩阵和协方差矩阵的更新。
4.2 自适应算法参数更新
自适应算法参数更新是本方法的核心创新之一。在不同的OCV范围内,电池的电压响应特性存在显著差异,因此需要对EKF算法的参数进行自适应调整以优化SOC更新过程。
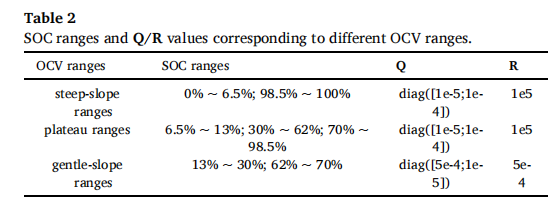
4.2.1 OCV范围的划分与识别
首先,根据OCV曲线的斜率,将整个OCV范围划分为不同的区域,包括陡峭斜率区、平台区和缓斜率区。通过在线识别当前的OCV值,可以确定当前所处的OCV范围。
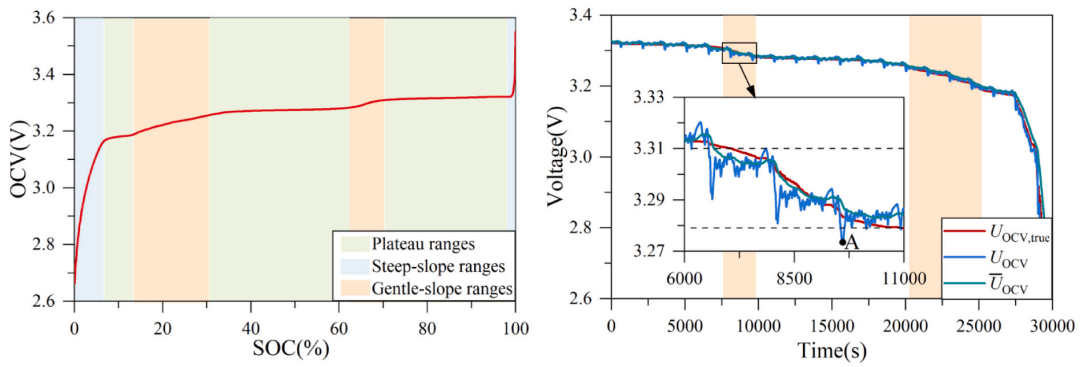
4.2.2 EKF参数的自适应调整
在陡峭斜率区和平台区,由于OCV对SOC变化的响应较小,若继续进行SOC更新可能导致算法发散。因此,在此两个区域内,通过设置EKF参数Q和R的值,使得Kalman增益G趋于零,从而禁止后验估计中的SOC更新。
相反,在缓斜率区,电池的电压响应特性与SOC变化的关联性更强,适合进行SOC更新。此时,通过增大Q值并减小R值,可以提高Kalman增益G,从而加快SOC的更新速度。
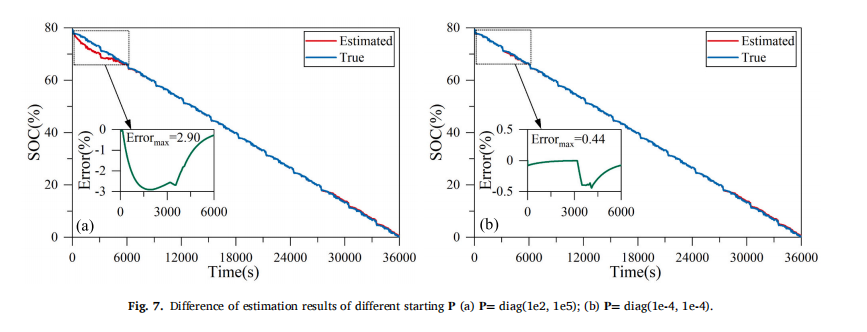
4.3 不同P, Q, R值下的测试结果
在实验验证中,研究者们测试了不同的P, Q, R参数设置对SOC估算准确性和稳定性的影响。实验结果表明,适当的P值有助于算法在初始阶段快速收敛,而合理的Q和R值对于维持算法在不同OCV范围内的稳定性至关重要。实验数据显示,当P设置过大时,如diag(1e2, 1e5),在OCV平台区可能会导致算法发散,而较小的P值,如diag(1e-4, 1e-4),有助于保持算法的稳定性。此外,通过调整Q和R的值,可以在不同的OCV范围内实现对SOC更新的精细控制,从而优化整个SOC估算过程。
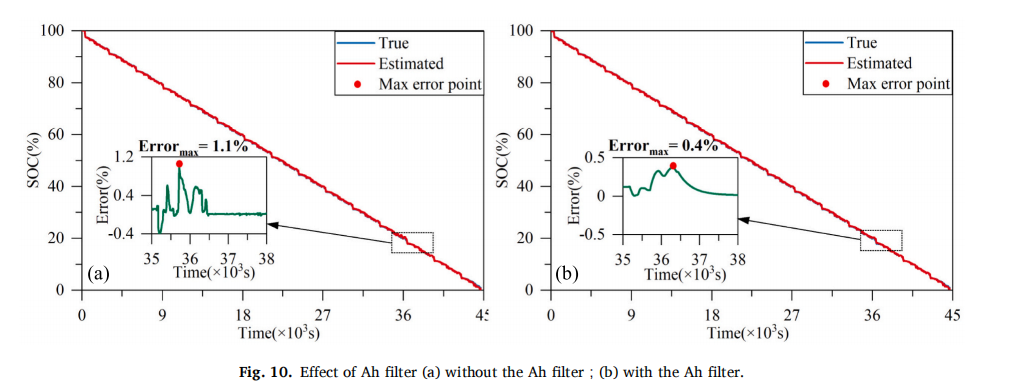
5. SOC平滑处理
为了进一步提高SOC估算的稳定性,本方法引入了Ah滤波器对EKF输出的SOC进行平滑处理。
5.1 Ah滤波器的原理
Ah滤波器基于库仑计量法,通过电池的充放电电流和时间来计算累积的电荷量,从而得到一个平滑的SOC估计值。其核心思想是利用电池的安时容量特性,通过电流积分来抵消EKF算法可能产生的SOC估计波动。
5.2 Ah滤波器的实现
具体实现中,Ah滤波器的输出SOC_Ah与EKF算法的输出SOC_EKF相结合,通过一个平滑系数k_out进行加权平均,得到最终的SOC估计结果SOC+_Ah。平滑系数k_out是一个小的正数,用于控制滤波器的响应速度。
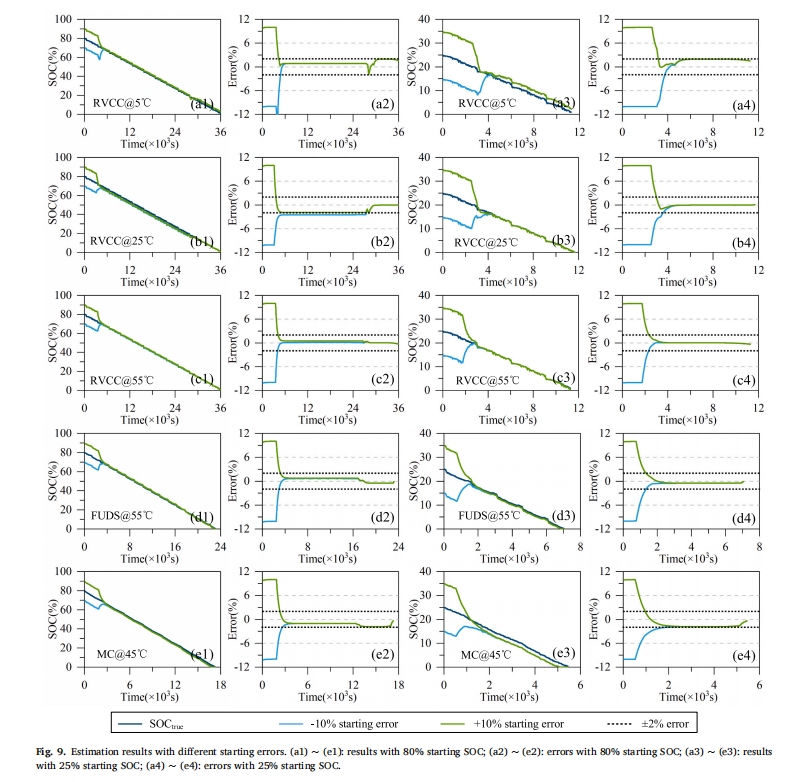
6. 实验验证
研究者们在不同温度下,通过不同的驾驶模式对所提出的SOC估算方法进行了大规模实验验证。实验结果表明,与传统方法相比,新方法在确保高精度的同时,展现出了良好的稳定性,最大绝对误差控制在2%以内。
7. 方法的实用性验证
通过分析从2,909辆电动汽车收集的实车运行数据,验证了所提方法的实用性。统计分析表明,所提方法的收敛SOC范围在实际应用中具有较高的覆盖率,能够满足实际应用需求。
8. 讨论与展望
尽管本文提出的算法在新电池上进行了验证,但电池老化后OCV范围的电压会发生变化,因此需要根据电池健康状态(SOH)更新OCV曲线。未来的研究将考虑联合估计SOH和SOC,以确保算法在整个电池生命周期内的准确性和可靠性。
9. 结论
本文提出的基于Thevenin模型的SOC估算方法,通过ARSR算法在线识别电池模型参数,结合EKF算法实时估算电池SOC,并在线识别特定OCV范围以自适应更新EKF参数,有效避免了算法在OCV平坦区域的发散问题。通过不同温度和驾驶模式的实验验证,以及实车数据的应用分析,证明了该方法的高精度和高稳定性,为电动汽车中LiFePO4电池的可靠管理奠定了基础。
10. 附录:数学表达式
以下是文章中提到的一些关键数学表达式,供有兴趣深入了解的读者参考:



















 186
186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











