







在2-stage的物体检测模型中经常会用到NMS,其目的是消除多余的框,找到最佳的物体检测位置。比如在RCNN系列算法中,会从一张图片中找到很多候选框(可能包含物体的矩形边框),每个候选框都有各自的属于前景或背景的概率。
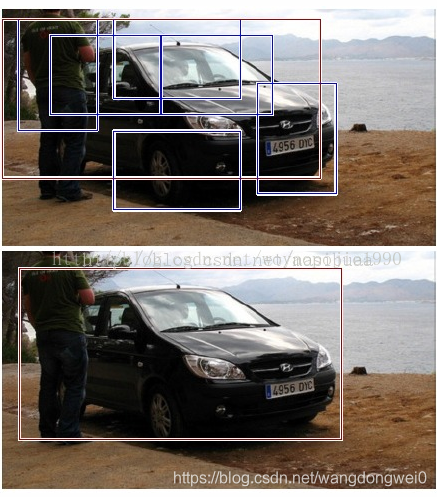
就像上面的图片一样,定位一个车辆,最后算法就找出了一堆的方框,我们需要判别哪些矩形框是没用的。
非极大值抑制:先假设有6个候选框,根据分类器类别分类概率做排序,从小到大分别属于车辆的概率分别为A、B、C、D、E、F。
1、从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
2、假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
3、从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
4、一直重复这个过程,找到所有曾经被保留下来的矩形框。
下面给出python的实现方式
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# --------------------------------------------------------
import numpy as np
# dets: 检测的 boxes 及对应的 scores;
# thresh: 设定的阈值
def nms(dets, thresh):
# boxes 位置
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
# boxes scores
scores = dets[:, 4]
areas = (x2 - x1 + 1) * (y2 - y1 + 1) # 各 box 的面积
order = scores.argsort()[::-1] # boxes 的按照 score 排序
keep = [] # 记录保留下的 boxes
while order.size > 0:
i = order[0] # score 最大的 box 对应的 index
keep.append(i) # 将本轮 score 最大的 box 的 index 保留
# 计算剩余 boxes 与当前 box 的重叠程度 IoU
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1) # IoU
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (areas[i] + areas[order[1:]] - inter)
# 保留 IoU 小于设定阈值的 boxes
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1]
return keep














 1300
1300











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









