







在物体检测中NMS(Non-maximum suppression)非极大抑制应用十分广泛,其目的是为了消除多余的框,找到最佳的物体检测的位置。
在RCNN系列算法中,会从一张图片中找出很多个候选框(可能包含物体的矩形边框),然后为每个矩形框为做类别分类概率
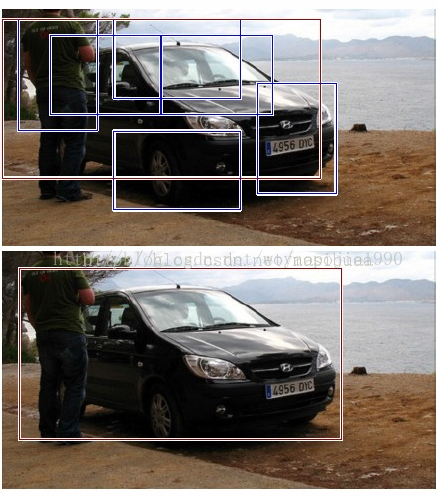
就像上面的图片一样,定位一个车辆,最后算法就找出了一堆的方框,我们需要判别哪些矩形框是没用的。
非极大值抑制:先假设有6个候选框,根据分类器类别分类概率做排序,从小到大分别属于车辆的概率分别为A、B、C、D、E、F。
1、从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
2、假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
3、从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
4、一直重复这个过程,找到所有曾经被保留下来的矩形框。
非极大值抑制(NMS)非极大值抑制顾名思义就是抑制不是极大值的元素,搜索局部的极大值。例如在对象检测中,滑动窗口经提取特征,经分类器分类识别后,每个窗口都会得到一个分类及分数。但是滑动窗口会导致很多窗口与其他窗口存在包含或者大部分交叉的情况。这时就需要用到NMS来选取那些邻域里分数最高(是某类对象的概率最大),并且抑制那些分数低的窗口。















 180
180

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









