







基本框架

Minimum Output Sum of Squared Error Filter (MOSSE)
t个目标区域样本分别为 f1,f2,⋯,ft ,通过滤波器 ht ,期望输出 gi (通常为二维高斯函数,峰值位于目标区域中心),最小化均方误差:

对 Ht 求导,令导数为0,得:
对于t+1帧,假设其在第t帧的目标区域内提取得到特征图z,那么计算 ht 与z的相关值
y的最大值的位置即被认为是t+1帧中目标区域的中心点.
我们保持目标区域尺寸不变,将其中心点进行移动相应位置,就得到了在新帧中的目标区域。对该区域进行特征提取,然后加入到训练集中对模型进行更新得到 ht+1 后,即可进行下一帧
中的目标检测了。
在实际的tracking过程中,一般使用如下方法来更新模型:
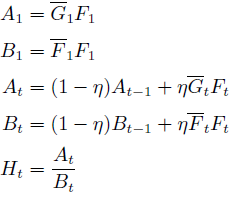
其中 η 为学习率。
缺点
- 只使用了灰度作为特征,模型所使用的特征维数太低,难以很好地反映目标的特性。
- 只估算了目标区域中心点在帧间的平移运动,而没有考虑目标在运动过程中反映在画面上的尺度变化,在目标尺度发生改变时难以适应。
Discriminative Scale Space Tracking Filter (DSST)
对MOSSE的改进:
- 使用fHoG替代灰度(通常fHoG为31dims,而DSST实际使用28dims)
- 考虑目标尺度变化
不考虑尺度变化
设特征维数为d,则特征图可记作 fl,l=1,2,⋯,d 。滤波器应和特征图匹配,误差函数:
引入 λ 项是为了控制滤波器频域参数求解过程中的除0,另一方面也可以控制滤波器参数变化范围, λ 越小,滤波器参数变化范围越大。
对上式做傅里叶变换,求导,令导数为0,得:

在实际操作中,可以用下式更新模型:
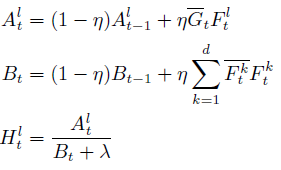
新帧预测:

考虑尺度变化
滤波器和特征图由 d×M×N 改为 d×M×N×S ,S = num of scales,即构造金字塔。这导致复杂度增大为 O(dMNS×logMNS)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 467
467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









