









极点:在一组点中,若沿着某一个点做直线,必然能找到一条直线使得所有点都在直线的另一侧,则这个点为极点。
凸包:给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点
| |
平面的一个子集S被称为是“凸”的,当且仅当对于任意两点p,s∈S,线段ps都完全属于S。(平面凸包定义):

计算凸包:
Graham扫描法: 复杂度O(nlogn)
求得凸包中的点是按逆时针排序的
<=表示如果存在共线的极点,则只取端点
扫描方法有两种,可以用极角序(按极角排序)或坐标序(按x坐标排序,x坐标一样按y坐标排序,其中扫描上凸包是从大到小,扫描下凸包是从小到大)
- 找到最左下的点(即y最小,y一样取最左边的),赋给p[1]
- 以p[1]作为极点,将所有点按极角排序,极角相同则按距离排序(去掉极角相同的,只留下距离最远的那个点)
- 求凸包时while循环把发现不是凸包顶点的点移除出去。因为当逆时针遍历凸包时,我们应该在每个顶点向左转,因此当while循环发现在一个顶点处没有向左转时,就把该顶点移除出去。
计算凸包周长:
hdu1392:Surround the Trees
//以左下点为极点求凸包周长
#include<bits/stdc++.h>
using namespace std;
struct point{
double x,y;
point friend operator -(point a,point b)
{return {a.x-b.x,a.y-b.y};}
}p[105],s[105];//p为所有点的集合,s为凸包点集
double dis(point a,point b)
{
point c=a-b;
return sqrt(c.x*c.x+c.y*c.y);
}
double cross(point a,point b)
{
return a.x*b.y-a.y*b.x;
}
//按照极角(polar angle)从小到大排序(以 p1为极点)
//极角相同的点按照到的距离从小到大排序。
int cmp(point a,point b)
{
double x=cross(a-p[1],b-p[1]);
if(x>0) return 1;
if(x==0&&dis(a,p[1])<dis(b,p[1])) return 1;
return 0;
}
double multi(point p1,point p2,point p3)//计算向量叉积
{
return cross(p2-p1,p3-p1);
}
int main()
{
int N;
while(scanf("%d",&N),N)
{
for(int i=1;i<=N;i++) cin>>p[i].x>>p[i].y;
if(N==1)
{
printf("0.00\n");
continue;
}
else if(N==2)
{
printf("%.2lf\n",dis(p[1],p[2]));
continue;
}
int k=1;
for(int i=2;i<=N;i++)
if(p[i].y<p[k].y||(p[i].y==p[k].y&&p[i].x<p[k].x))k=i;
swap(p[1],p[k]);//找到处于最左下方的点,赋给p[1]
sort(p+2,p+1+N,cmp);//对点按极角排序,p[1]为极点
s[1]=p[1];
s[2]=p[2];
int cnt=2;
//while循环把发现不是凸包顶点的点移除出去,因为当逆时针遍历凸包时,我们应该在每个顶点向左转
//因此当while循环发现在一个顶点处没有向左转时,就把该顶点移除出去。
for(int i=3;i<=N;i++)//求凸包
{
while(cnt>=2&&multi(s[cnt-1],s[cnt],p[i])<=0) cnt--;
s[++cnt]=p[i];
}
double sum=0;
for(int i=1;i<cnt;i++)//求凸包周长
sum+=dis(s[i],s[i+1]);
printf("%.2f\n",sum+dis(s[1],s[cnt]));
/*
double area=0;
for(int i=2;i<=cnt-1;i++)//求凸包面积,这里因为就是凸多边形所以可以用某个顶点作为顶点分割三角形
area+=fabs(multi(s[1],s[i],s[i+1]));
printf("%d\n",int(area/100));
*/
/*标准求多边形面积,别漏了最后一个和起点的叉积
for(int i=1;i<=cnt;i++)//求凸包面积
area+=cross(s[i],s[i==cnt?1:i+1]);
if(area<0)
area=-area;
*/
}
return 0;
}分治法:求解上凸包和下图包合并
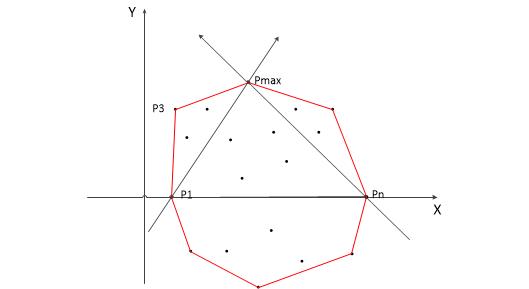
- 按横坐标从小到大(再总坐标从小到大)排序,首先排序后的起终点必然在凸包里
- 连接p1pn,这条直线将点集分成了上下两个部分,则在这两个部分中分别求得上、下凸包
- 对于上凸包,找到上部分离直线最远的点pmax,连接p1max,pmaxpn,则直线p1pmax右将上部分分成了两个凸包部分
- 重复,求下凸包类似
- 判断点位于直线的左侧还是右侧可以用叉积
//这是三个点的叉乘(判断第三个点p3在直线p1p2的左方还是右方)左方>0
double multi(node p1, node p2, node p3)
{
return p1.x*p2.y+p3.x*p1.y+p2.x*p3.y-p3.x*p2.y-p2.x*p1.y-p1.x*p3.y;
}上凸包:即将点按x坐标从小到大排序,相当于以y轴负无穷处某一点为极点,从右往左扫描极点。这样算出来的凸包为上凸包。即在左右端点上方的极点
下凸包:即将点按x坐标从小到大排序,相当于以y轴负无穷处某一点为极点,从左往右扫描极点。这样算出来的凸包为上凸包。即在左右端点上方的极点
poj1113:Wall
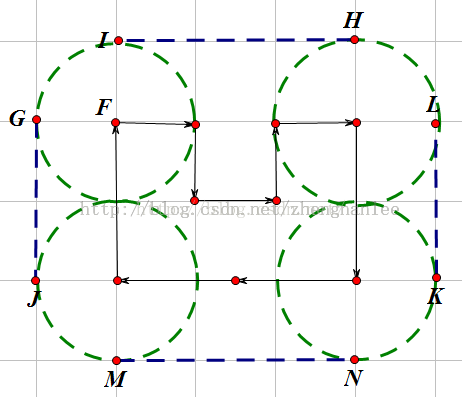
theme:求能围住所有的点且距离所有点的距离>=L的围墙的长度
solution:即凸包周长+2*pi*L
//求能围住所有的点且距离所有点的距离>=L的围墙的长度
#include<iostream>
#include<cmath>
#include<cstdio>
#include<algorithm>
using namespace std;
struct Point
{
double x, y;
Point operator-(Point & p)
{
Point t;
t.x = x - p.x;
t.y = y - p.y;
return t;
}
double cross(Point p)
{
return x*p.y - p.x*y;
}
double dist(Point & p)
{
return sqrt((x - p.x)*(x - p.x) + (y - p.y)*(y - p.y));
}
};
bool cmp(Point p1, Point p2)//先横坐标从小到大,再纵坐标从小到大
{
if (p1.x != p2.x)
return p1.x < p2.x;
return p1.y < p2.y;
}
Point point[1005];
int convex[1005];
int N, L;
//返回极点个数+1
int getConvexHull()
{
sort(point, point + N, cmp);
int temp;
int total = 0;
for (int i = 0; i < N; i++)//求解下凸包,<=关系则如果存在共线的点只取端点
{
while (total > 1 && (point[convex[total - 1]] - point[convex[total - 2]]).cross(point[i] - point[convex[total - 1]]) <= 0)
total--;
convex[total++] = i;
}
//求解上凸包
temp = total;
for (int i = N - 2; i >= 0; i--)
{
while (total > temp && (point[convex[total - 1]] - point[convex[total - 2]]).cross(point[i] - point[convex[total - 1]]) <= 0)
total--;
convex[total++] = i;
}
return total;//返回组成凸包的点的个数,实际上多了一个,是起点(开始与最后都是起点),所以组成凸包的点个数是total-1
}
int main()
{
scanf("%d%d", &N, &L);
for (int i = 0; i < N; i++)
scanf("%lf%lf", &point[i].x, &point[i].y);
int num = getConvexHull();
double ans = 0.0;
for (int i = 0; i < num - 1; i++)
ans += point[convex[i]].dist(point[convex[i + 1]]);
ans += 3.14159265358927 * 2 * L;
printf("%.0f\n", ans);
return 0;
}
/*
9 100
200 400
300 400
300 300
400 300
400 400
500 400
500 200
350 200
200 200
1628
*/
稳定凸包
即由这些点构成的凸多边形唯一,无论再添加多少新的点都不可能再形成别的凸多边形。
结论:稳定凸多边形的任意一条边的点数>=3
左边的凸包是不稳定的,因为加上一个点后可以形成一个新的凸多边形。
可以看出如果一个凸多边形的某一条边上只有端点两个点的话,则这个凸多边形是不稳定的。















 3224
3224











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









