






 本文介绍了基于工作模式的相控阵雷达功能仿真的方法,强调在非专业或复杂系统应用中,如何简化专业模型,聚焦核心战术指标。文中详细阐述了创建雷达对象、管理雷达工作模式,包括TWS、TAS方位分区、远近分区和高低双屏模式,并探讨了数据结构和搜索跟踪过程的实现。该方法旨在为系统推演、模拟和对抗提供工具,服务于效能评估和训练需求。
本文介绍了基于工作模式的相控阵雷达功能仿真的方法,强调在非专业或复杂系统应用中,如何简化专业模型,聚焦核心战术指标。文中详细阐述了创建雷达对象、管理雷达工作模式,包括TWS、TAS方位分区、远近分区和高低双屏模式,并探讨了数据结构和搜索跟踪过程的实现。该方法旨在为系统推演、模拟和对抗提供工具,服务于效能评估和训练需求。
基于工作模式的相控阵雷达功能仿真方法
文章目录
严格来讲,本文所提方法称为“相控阵雷达功能”的“仿真方法”更为合适,称“功能仿真”还较为勉强。
一、问题的提出
仿真往往可以分为4个层级: 战役级、任务级、交战级和工程级[1]。当前,雷达系统仿真主要有2类方法[2]: 功能仿真和信号仿真。
文献[3]进行了任务级相控阵雷达建模与仿真研究,将相控阵雷达置于对抗干扰的环境下,建立了相控阵雷达的控制中心模型、天线模型、信号处理模型和数据处理模型。
文献[4]提出了相控阵雷达系统功能仿真流程并构造了其中的主要模型,包括视距计算模型、天线模型、检测信噪比计算模型、目标发现判断模型、测量误差计算模型、目标航迹管理模型等。文献[2]对一般的功能仿真框架进行了改进,增加了任务资源调度、天线图仿真等内容。
文献[5]研究了红蓝对抗环境下的机载相控阵雷达的功能仿真,涵盖了接收机、目标检测、数据处理、资源调度等的建模。文献[6]则对舰载相控阵雷达进行了功能仿真。
此外,还有些研究专注于资源调度等问题,如文献[7]和文献[8],也同样进行了功能的仿真。
现有研究的特点就是专业,不论是对抗、干扰环境,还是定位于系统功能仿真,或着重于资源调度研究,往往都涉及天线、波位编排、信噪比等诸多专业建模。其实质正如文献[2]所指出的:在计算机上重现雷达系统及其动态过程,并调整参数反复运行,得到仿真结果,代替或部分代替实际系统的试验结果并对其进行分析研究,为系统的效能评估、作战人员的模拟训练、加快雷达研发周期等服务。
但是,设想一下如下的应用场景。
①用于推演、模拟、对抗的大型系统,包括飞机、舰船、各类探测设备等。相控阵雷达只是其中的一个组成装备。
②非专业用户熟悉掌握相控阵雷达能力,或者在装备采购中提出需求。
在类似于上述情况下,面临的是非雷达专业人员或复杂大系统的应用需求,而不是要对相控阵雷达本身进行研究,此时可以不必考虑雷达方程、资源调度、波位编排、天线方向图等这些复杂的模型,而只需能够仿真核心战术指标。做一个简单类比,大系统中的卫星模型只需仿真卫星位置、速度以及时间空间分辨率等核心指标,而无需对太阳能帆板、控制系统模型过多着墨;飞机也只需仿真其位置、速度、RCS值等即可。
《相控阵雷达技术》[9]一书给出了相控阵雷达的战术指标:雷达观察空域,包括雷达作用距离、方位观察空域和仰角观察范围;雷达测量参数,包括目标位置参数、目标运动参数、其他目标特征参数;雷达的分辨率,包括角度分辨率、距离分辨率、横向距离分辨率和速度分辨率;处理多批目标的能力;数据率。
与机械式雷达相比,相控阵雷达的突出特点是工作模式的多样式和战术指标的可变性。在不同控制模式参数控制下,战术指标是不同的。
针对以上问题,进行了功能仿真设计。下面,首先介绍一下相应的界面与功能,然后再阐述其实现方法。
二、功能简介
(1)创建雷达对象
创建一个相控阵雷达的对话框如图所示
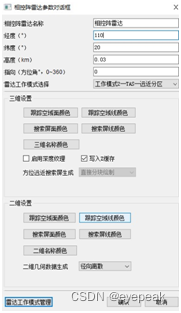
可以看出,在场景中创建一个相控阵雷达时,除了名称、二三维显示属性之外,主要有:①位置,通过经度、纬度和高程设置;②指向,以正北为0,按顺时针方向设置指向角度,这一点很重要,影响到后续工作模式的实现方法;③工作模式选择,可以预先设置好各种工作模式,直接选择一种即可。
(2)雷达工作模式管理
雷达工作模式管理界面如图所示

用于管理雷达工作模式,对模式进行增加、修改、删除和顺序的调整。目前,工作模式管理是在相控阵雷达对象这一层级实现的。事实上,也可以考虑另外两种方法:一是构建一个装备库,即建立雷达型号列表,每个装备类型管理本类型的工作模式,创建雷达对象时先选择装备、再选择工作模式;二是建立一个工作模式库,对工作模式库进行管理,雷达直接在大的模式库中选择,而非每个雷达对象管理自己的模式库。
增加模式时操作界面如图
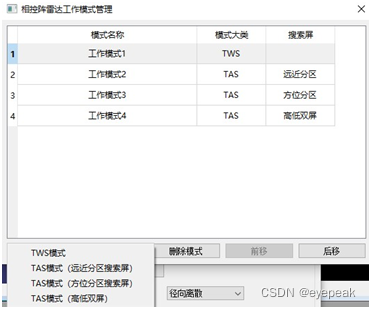
点击增加按钮时,弹出模式类型对话框,需要选择创建的工作模式类型。
(3)TWS模式
关于工作模式,主要可参见文献[9]和文献[10]。文献[10]指出,相控阵雷达工作模式设计就是将具体的、有针对性的某种搜索、跟踪方式和雷达工作参数封装为一套完整的、相对固定的、可重复调用的工作控制关系的过程。
TWS模式是边搜索边跟踪的方式,只有搜索状态,目标跟踪由雷达数据处理完成(文献[10])。
TWS模式的跟踪空域和搜索参数设置界面如图所示
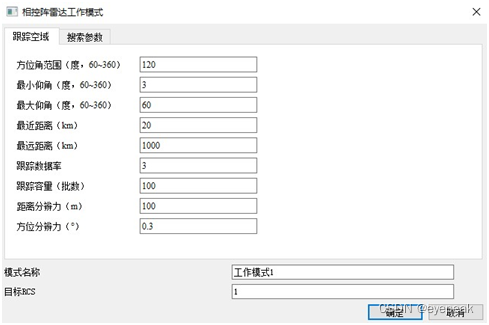
跟踪空域定义包括:方位角范围,以度数给出,而实际的方位角范围,是需要结合前述雷达的指向参数来计算,如方位角范围120°,指向为90,则实际的方位角范围是[30°,150°];仰角范围,距离范围。
此外,在跟踪空域主要指标上,本文提取了跟踪数据量、跟踪容量、距离分辨力和方位分辨力这4个指标。同时,由于工作模式在规划设计中,本身是应该针对某类型目标开展,即设定了目标RCS值这一属性。
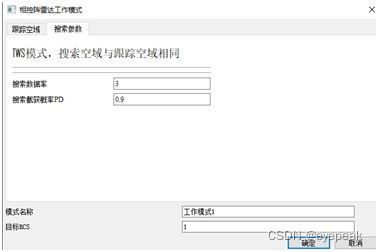
在搜索参数指标上,主要提取了搜索数据率和搜索截获概率2个指标。
当然,如果针对某个特殊的应用,还需要其他指标支持,那也可以进行扩展,但本文中如上指标已经足够,基本相当于卫星的时空分辨率指标层级。
(4)TAS方位分区模式
TAS是搜索加跟踪的方式,也是体现相控阵雷达特点的工作模式。TAS各模式跟踪区域与TWS并无区别,因此主要看其搜索屏的定义。
方位分区搜索屏的定义界面如下
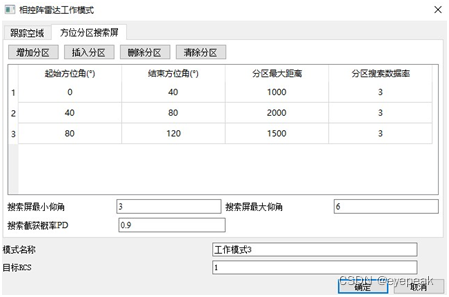
方位分区中各分区中每个分区的最大距离和搜索数据率不同,但是各分区的最大最小仰角、搜索截获概率是相同的。支持分区的增加、插入、删除等操作。各分区的方位角需要连续而不能中间有空缺方位范围。
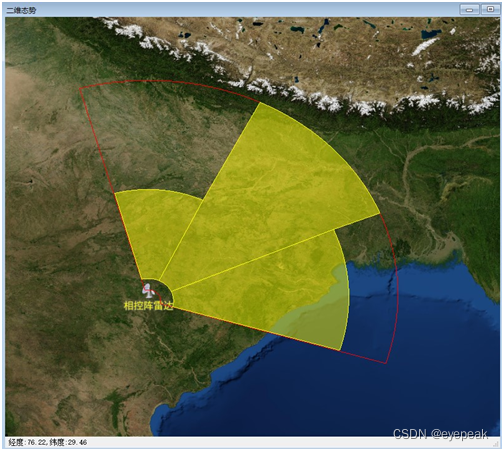
方位分区TAS模式搜索屏的二维显示如图所示。
(5)TAS远近分区模式
远近分区是在不同的距离范围划分不同区域,分区主要区别也是搜索数据率。
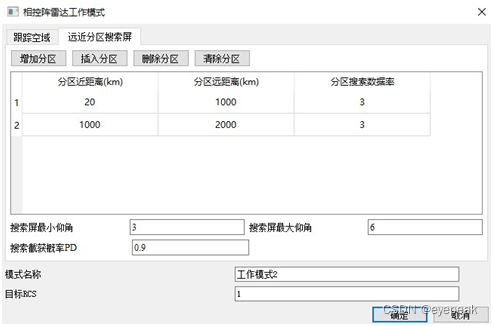
搜索屏中各分区的仰角范围和截获概率是一致的,区别主要是距离范围和搜索数据率,各分区距离范围连续。
远近分区如图所示。
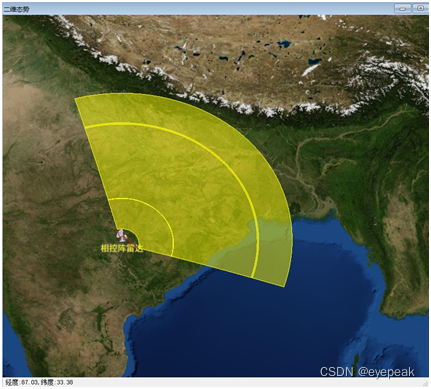
可以看出,在二维显示上,各分区的范围有重叠,关于这一点,将在另一篇博文讨论。
(6)TAS高低双屏模式
这种模式是文献[10]提出的一种用于临近空间对象的搜索屏,有两个相对独立的搜索范围。
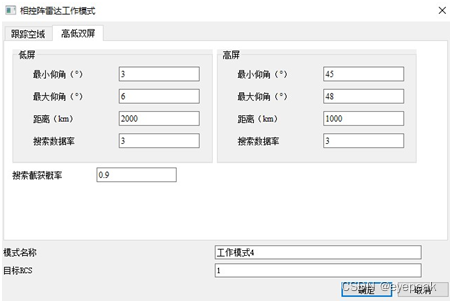
此模式下,两个屏的最近距离、方位角范围都与跟踪空域的最近距离一致,需要分别输入的是仰角范围、最大距离和搜索数据率。
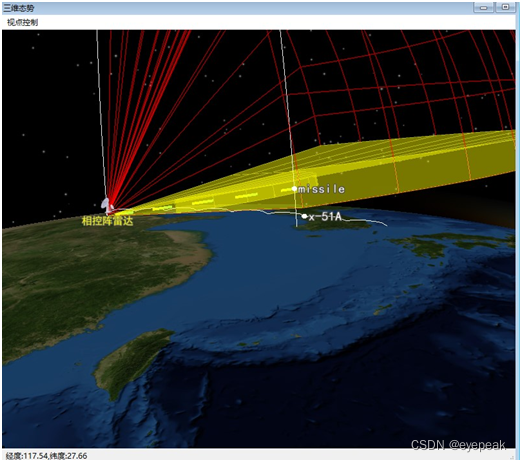
高低双屏的二维效果如图所示。

三、实现技术
(1)数据结构
从上述功能简介中可以看出,工作模式由两部分组成:跟踪空域和搜索屏,而搜索屏又由多个分区组成。从几何形状的角度,每个分区其实和跟踪空域并无本质区别。
首先定义表达几何形状的基类,再派生其他类
class ConicFrustum{
cartesianFrame _frame; //坐标系
double _minRange;
double _maxRangeLow;
double _maxRangeHigh;
double _minAzimuthAngle;
double _maxAzimuthAngle;
double _minElevetionAngle;
double _maxElevetionAngle;};
由基类派生跟踪区域类、搜索分区类
class PhasedArrayRadarTrackRange :public ConicFrustum{
double _trackDataRate; //跟踪数据率
int _trackNumber; //跟踪目标容量
double _dimensionDistance; //距离分辨力
double _dimensionAzimuth;//方位分辨力};
class PhasedArrayRadarSearchBlock:public ConicFrustum{
double _searchDataRate; //搜索数据率};
基于上述,组合成相控阵雷达工作模式
class PhasedArrayRadarWorkMode{
enum WorkMode {
TWS ,
TAS , };
enum ScreenType {
NearFarScreen, //远近分屏模式
AzimuthPartionScreen, //方位角分区模式
DoubleScreenScreen, //高低双屏模式
BreakdownScreen, //击穿模式};
std::string _modeName;
WorkMode _workMode;
double _targetRCS;
ScreenType _screenType;
cartesianFrame _frame; //坐标系
QVector<PhasedArrayRadarSearchBlock> _searchBlocks;
PhasedArrayRadarTrackRange _trackRange;
double _searchCaptureProbability;//搜索截获概率};
可以看出,上述类即是前述界面所对应的内部数据。而每个雷达对象里以工作模式列表的形式存储其工作模式,即形成了基于工作模式的相控阵雷达的数据基础,而对应的界面交互、二三维绘制、输入输出、搜索跟踪等功能,都是在工作模式层面或者ConicFrustum类中实现的。
(2)搜索与跟踪过程
如果是在装备级仿真层面,那么搜索与跟踪需要考虑雷达方程、资源调度等复杂因素,但在本文的仿真粒度下,这些都进行了简化。
直接通过几何关系判定目标是否可见:首先根据目标的RCS值修正雷达跟踪空域或搜索屏分区的距离值(RCS与距离的4次方成反比);计算目标在雷达坐标系下的方位角、俯仰角和距离值;判定目标是否位于探测范围之内。
但是搜索屏和跟踪空域的逻辑并非一致。
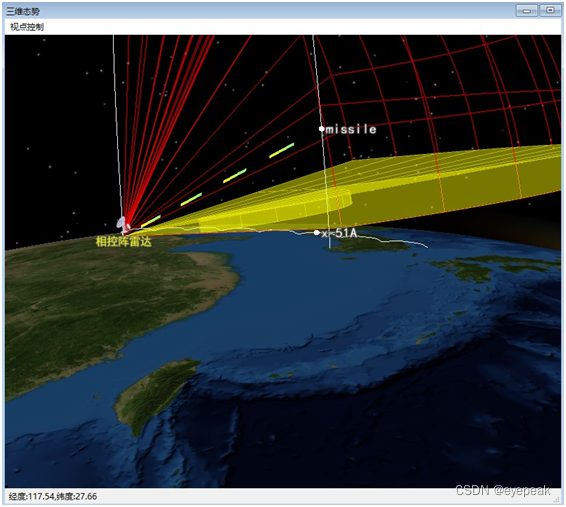
目标只有被搜索到,才会被跟踪。而相控阵雷达的搜索屏往往厚度并非很大,如果仿真步长过大,那么很有可能出现目标在两个仿真时刻之间穿过了搜索屏,这自然也会影响后续的跟踪过程。
因此搜索屏的搜索逻辑为:设步长为搜索时间间隔(搜索数据率的倒数,这也是之所以需要这个参数的原因);由上一个仿真时刻开始,到当前仿真时刻;逐步长判断目标是否落入搜索屏范围,任何一次落入即为搜索成功(也可以考虑按K-M法则)。
搜索成功之后,就会转入跟踪逻辑:维护跟踪目标列表;每个仿真时刻,判断列表中目标是否已经超出跟踪空域范围,超出范围则从列表中删除;如果列表中目标个数小于跟踪批数(见前述功能中指标),则可以将新搜索的目标加入到跟踪目标列表。
下图为搜索屏实现搜索的效果
下图为目标越过了搜索屏,但仍处于跟踪空域被持续跟踪的效果
参考文献
[1] 黄柯棣,邱晓刚.建模与仿真技术[M].长沙:国防科技大学出版社,2010: 10-17.
[2] 王路,邢清华. 改进型功能级相控阵雷达系统仿真[J].现代防御技术,2013,41(1):64-69.
[3] 韩文彬. 任务级雷达建模与仿真技术研究[D]. 长沙:国防科学技术大学,2008:43-48.
[4] 李钦富,许小剑. 相控阵雷达系统仿真模型研究[J]. 中国电子科学研究院学报,2007(6):239-243.
[5] 雷张华. 机载相控阵雷达系统功能级建模与仿真[D].西安:西安电子科技大学,2014:17-47.
[6] 王杰. 舰载相控阵雷达系统功能级建模与仿真[D].西安:西安电子科技大学,2014:13-38.
[7] 陶秋峰. 相控阵雷达功能仿真及调度算法研究[D].杭州:杭州电子科技大学,2013:6-18.
[8] 张海越. 空间监视相控阵雷达调度策略的研究与设计[D].南京:东南大学,2018:8-17.
[9] 张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2004:38-49.
[10] 毕增军,徐晨曦,张贤志,等.相控阵雷达资源管理技术[M].北京:国防工业出版社,2016:142-158.

















 1055
1055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









