







论文主要讨论了一种基于位移残差(displacement residuals)的方法,用于识别滑坡运动中的行为变化,特别是在滑坡发生前的预警过程中。
Nava L, Tordesillas A, Qian G, et al. Displacement residuals reveal landslide regime shifts[J]. Landslides, 2025, 22(1): 1-16.
期刊
Landslides( JCR Q1 )
作者介绍
Lorenzo Nava Email: lorenzo.nava@phd.unipd.it
意大利帕多瓦大学地球科学系
机器智能与边坡稳定实验室,帕多瓦,意大利
Department of Geosciences, University of Padova,
(Machine Intelligence and Slope Stability Laboratory)Padova, Italy
-
位移残差的应用:研究提出了使用滑坡位移残差来识别滑坡的“ regime shift”(即滑坡运动模式的变化)。滑坡的行为通常会发生变化,特别是在接近滑坡失败(failure)时,表现为突然的加速。通过分析位移残差,可以检测到这些动态变化,而不仅仅依赖于传统的位移阈值(如速度阈值)。
-
模型的优化:文章提出了一种新的方法——LRSD(Landslide Regime Shift Detection),该方法能够在监测滑坡的位移时发现不符合历史行为的变化。LRSD通过捕捉这种“ regime shift”来生成预警,避免传统方法可能错过的快速行为变化。
-
改进的预警系统:LRSD可以与现有的滑坡警报系统(如基于速度的警报系统)配合使用,提升预警系统的灵敏度和准确性。通过LRSD,能够在滑坡行为发生变化时发出预警,但这不一定意味着滑坡会立即失败。它主要关注滑坡行为的变化而不是具体的失败时刻。
-
适应性和实时性:该方法具有很高的适应性,能够根据不同的滑坡类型和环境进行调整。它能快速生成预警,适合实时监控,并能够通过调整关键参数(如持续时间PiT和超过阈值的监测点数量NP)来平衡假警报和漏报的风险。
-
案例研究:论文通过多个滑坡案例验证了该方法的有效性,包括Pomarico滑坡、Sant’Andrea滑坡和Veslemannen滑坡。结果表明,LRSD方法在这些案例中的表现优于传统的警报系统,能够减少不必要的警报,并及时发出针对重大变化的预警。
-
模型的局限性和挑战:尽管LRSD方法表现出较高的灵敏度,但其效果仍受数据质量、监测点数量、时间间隔等因素的影响。需要高质量和高频率的数据输入,且方法的适应性和准确性可能会因滑坡类型和监测系统的不同而有所不同。
总的来说,这篇论文提出了一种基于位移残差的滑坡行为变化检测方法,能够有效捕捉滑坡运动中的关键动态变化,为早期预警系统提供有力支持。
全文翻译
摘要
尽管在检测和监测不稳定边坡的先进技术方面取得了显著进展,准确预测灾难性滑坡仍是一项挑战。为应对这一挑战,我们的研究将先进的预测模型与颗粒系统理论相结合,以深入揭示缓慢移动的深层滑坡动力学中的状态转变。我们的方法旨在识别与历史滑坡动力学显著不同的异常行为。
该方法基于颗粒系统中前兆破坏状态的一般性动力学,利用“群体动力学”来识别潜在破坏的前兆指标。我们选择了三个受监测的缓慢移动滑坡作为测试案例。我们采用误差修正协整向量自回归模型(EC-VAR),并引入外生变量,来编码历史时空滑坡动力学,并通过考虑历史滑坡运动及其与外部触发因素的关系,预测多个位置的位移。
位移残差通过计算在给定的历史校准时间窗口内预测位移与实测位移之间的差值获得。我们通过分析这些残差的历史分布来确定其阈值。最后,通过考虑阈值超限的持续时间以及同时超过阈值的监测点数量,来编码群体动力学。
该方法具备多项优势,包括有效识别关键状态转变、良好的适应性与可移植性,并可将状态转变信息引入本地滑坡预警系统。在与传统预警系统结合使用时,该方法能够增强预警结果的可信度,从而提升滑坡预警系统的可靠性。
关键词
滑坡灾害 · 预警 · 警报系统 · 自回归模型 · 状态转变
1. 引言
滑坡是一种常见的全球性地质灾害,每年造成大量人员伤亡和经济损失(Froude 和 Petley,2018)。尽管对灾难性滑坡进行实时监测面临诸多挑战,但研究非灾难性的缓慢移动滑坡仍提供了宝贵的机会。这类滑坡在长时间尺度上沿坡向缓慢移动,持续时间可从几个月至数百年不等,移动速率范围从几毫米到每年数米(Lacroix 等,2020)。虽然缓慢移动滑坡通常不会直接导致人员伤亡,但其内部可能孕育的快速移动的碎屑流仍可能对大范围地区构成威胁(Palmer,2017)。此外,缓慢移动的滑坡也可能突然加速,进而引发灾难性破坏和广泛破坏。值得注意的是,回顾性研究已确认,灾难性滑坡前常出现缓慢的地表形变作为前兆信号。因此,在灾难性事件发生前实现滑坡的早期识别,已成为当前研究的重点之一(Lacroix 等,2020)。
减轻滑坡风险的方法多种多样,通常可分为两类:结构性措施和非结构性策略。前者通过直接降低滑坡发生的可能性或提升易受灾要素的工程韧性来减少风险;而后者则不依赖于结构工程。在非结构性策略中,滑坡预警系统(LEWS)因其多种优势而在全球范围内受到重视。与结构性措施相比,预警系统具有成本低、环境影响小的优点,且可借助日益先进的监测技术和可靠的数据集进行模型校准(Intrieri 等,2012;Pecoraro 等,2019)。LEWS 的目标是在滑坡可能发生前,向面临威胁的个人、社区或组织提供及时的信息,使其能够做好准备并采取应对措施,从而减少生命损失和其他不利影响。
LEWS 可部署于两个不同的尺度:局部尺度(Lo-LEWS),用于单一滑坡体的预警(Dick 等,2015);区域尺度,用于大范围区域的滑坡预警(Segoni 等,2014)。研究普遍认为,预警系统在风险降低与损失缓解方面具有良好的性价比(Intrieri 等,2012)。这些系统通常包括监测、预测、预警和响应四个核心环节。为了构建有效的大型复杂滑坡的 Lo-LEWS,识别关键指标的具体阈值是必要的。这些指标通常包括位移、位移速率、降雨(如强度和持续时间)、孔隙水压力或测压管水位(Crosta 等,2017)。这些阈值作为触发预警信号的关键标准,有助于制定应对策略,从而减轻滑坡相关的风险和损失。
最常见的 Lo-LEWS 方法是基于速率阈值,该阈值通常来源于历史数据,反映了过去曾导致滑坡的位移速率(Crosta 和 Agliardi,2002)。Pecoraro 等(2019)通过对 29 个 Lo-LEWS 的综合研究指出,大多数预警模型主要聚焦于位移指标,如位移速率、速度和加速度,因为这些指标与滑坡活动直接相关(Festa 等,2023)。由于天气诱发滑坡的频率较高,气象因素也被纳入模型中。同时,大多数系统还监测未直接用于模型预测的参数,这体现了管理人员持续评估并优化预警模型的主动性。
基于位移(及其速率)的预警方法建立在这样的认识之上:在长时间尺度上,坡体位移通常符合标准的蠕变曲线,在此过程中,位移加速是即将失稳的前兆(Fukuzono,1985;Kawamura,1985;Voight,1988;Zvelebill 和 Moser,2001)。近年来的研究进一步致力于改进现有方法,以更准确地预测失稳发生的具体时间(Segalini 等,2018;Ju 等,2020;Leinauer 等,2023),但仍存在一个关键的不确定性,即何时使用这些方法才最为恰当。因为若在非临界时刻使用,反而可能导致误判(Catani 和 Segoni,2022)。
尽管过去几十年在不稳定坡体监测技术的发展与部署方面取得了重大进展(Monserrat 等,2014;Crosta 等,2017),但对灾难性滑坡的准确预测仍存在明显局限。因此,实现对灾难性滑坡的实时预测仍是当前的一项重要需求,这将有助于及时发布相关预警,从而有效降低风险。
本研究提出了一种滑坡状态转变检测器(Landslide Regime Shift Detector,LRSD),该方法整合了先进的预测模型,用以识别缓动滑坡体内部的状态转变。我们采用误差修正协整向量自回归模型(ECCVAR)来拟合滑坡位移数据的时空依赖性,并引入外部触发因素(外生变量)进行位移预测。考虑到 ECCVAR 模型可能无法完全捕捉滑坡趋势中突发且剧烈的变化,因此我们使用位移残差来检测这些可能导致灾难性破坏的行为突变。最后,我们通过分析超过阈值的持续时间以及同时超过阈值的监测点数量来刻画“群体动力学”,这一特征对于识别滑坡破坏前的关键信号至关重要,其原理基于颗粒系统中前兆破坏阶段的一般性动力学机制。
2. 案例研究
本研究选取了三个不同的滑坡实例来评估所提出的滑坡状态转变检测器(LRSD)的有效性。这三个案例包括:
- Sant’Andrea 滑坡,位于意大利东北部威尼托大区贝卢诺省的多洛米蒂山脉区域,属于 Perarolo di Cadore 市镇;
- Pomarico 滑坡,位于意大利南部的巴西利卡塔大区;
- Veslemannen 滑坡,位于挪威西部的 Romsdalen 地区。
2.1 Sant’Andrea 滑坡
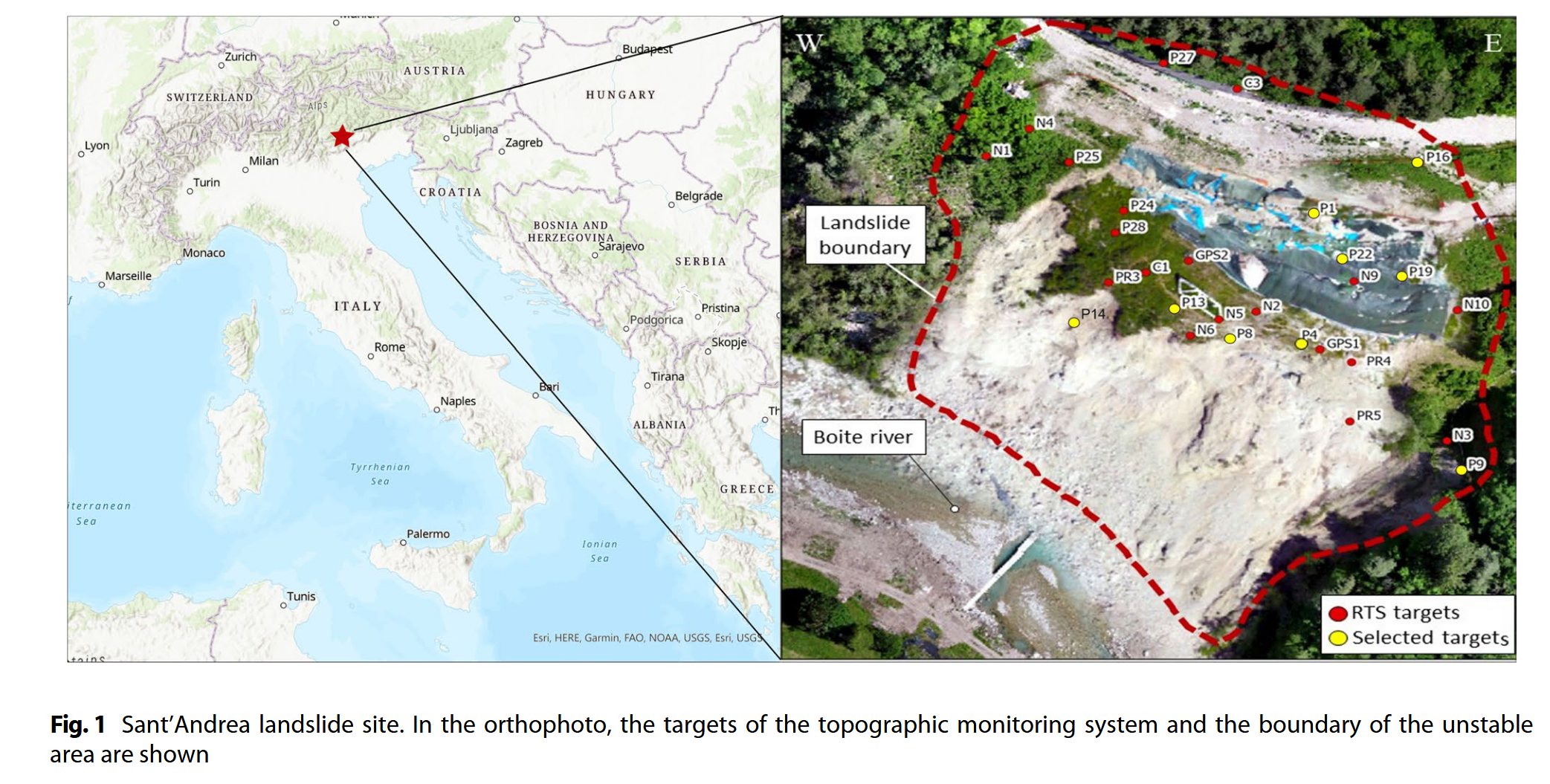
Sant’Andrea 滑坡位于意大利东北部阿尔卑斯山东南支的多洛米蒂地区,影响着 Boite 河左岸的山坡地带,紧邻 Perarolo 村上游地区(见图 1)。该滑坡的位置对当地居民构成较大威胁,因为不稳定滑坡体一旦垮塌,可能暂时阻塞 Boite 河道,引发下游洪水。
该滑坡区域的地质特征已通过多年的研究被广泛了解,这些研究结合了现场调查、地质与岩土分析以及对岩性单元的空间分布信息。Sant’Andrea 滑坡主要由一层厚约 30 米的粘土-石灰质滑坡堆积物构成,其物质组成复杂,粒径和岩土力学特性各异。该堆积体滑动于一层风化岩基之上,底岩为含有石膏和硬石膏的褶皱白云岩层。
Sant’Andrea 滑坡表现出复杂的运动特征,其滑动行为交替出现缓慢位移和快速位移阶段,后者通常由长时间强降雨事件触发。滑坡体不稳定坡面的地质与水文地质背景通过多次调查得以明确,为理解其滑动机制提供了重要参考。
研究中识别出两种地下水流系统:一是位于堆积物上层的浅层水系统;二是涉及底岩上部的深层水系统,底岩主要由风化和破碎的石膏构成。水在诱发坡体不稳定方面发挥着关键作用:在降雨期间加速滑动,而在干旱时期则因水在上部岩体内的深层循环而引起缓慢滑动。
此外,水与底岩中的石膏相互作用会影响滑坡体的力学性质。水化过程使弱石膏岩层呈现出塑性流变行为,并导致喀斯特空洞与微裂隙的发展(Brezzi 等,2021)。
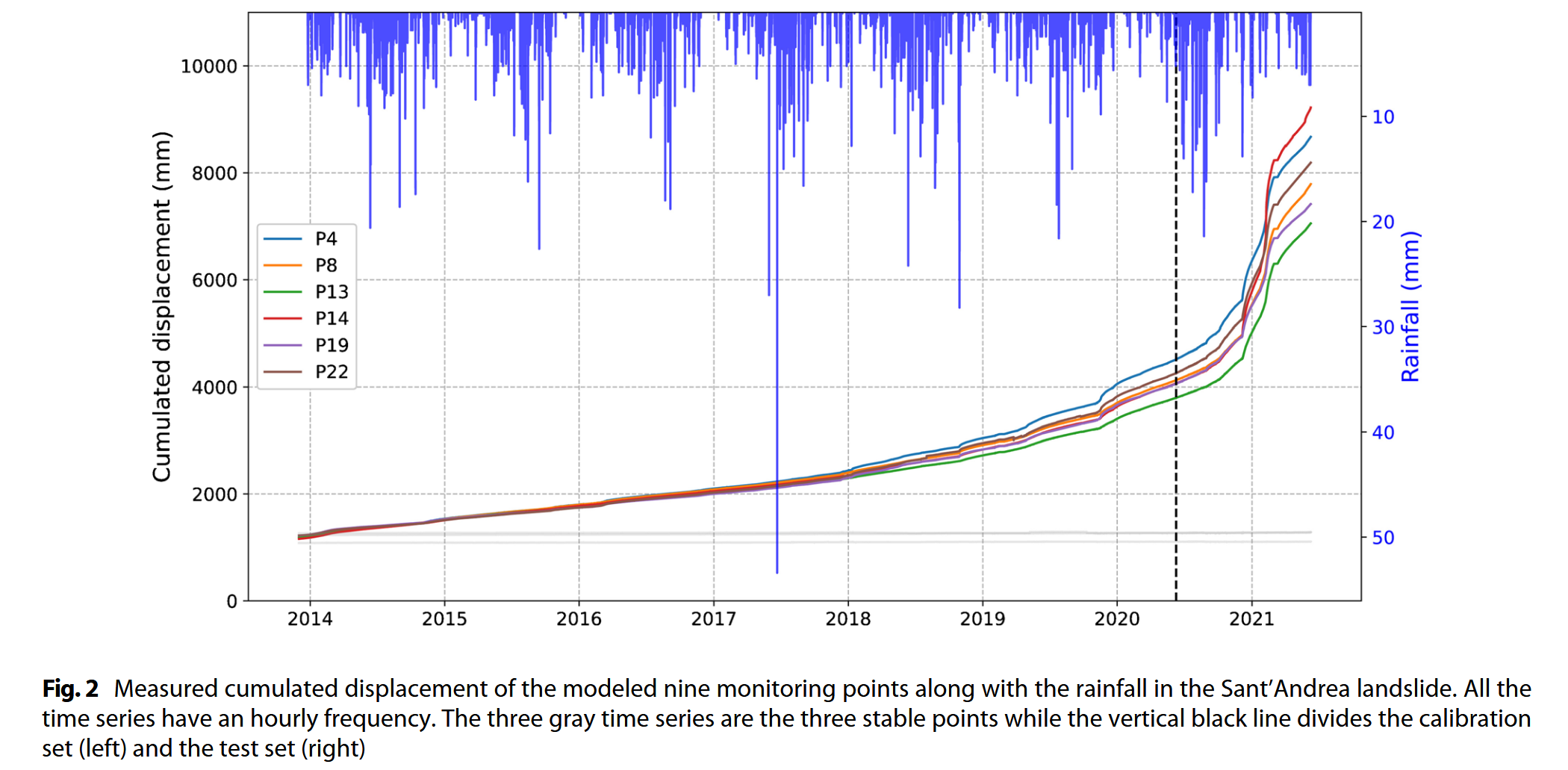
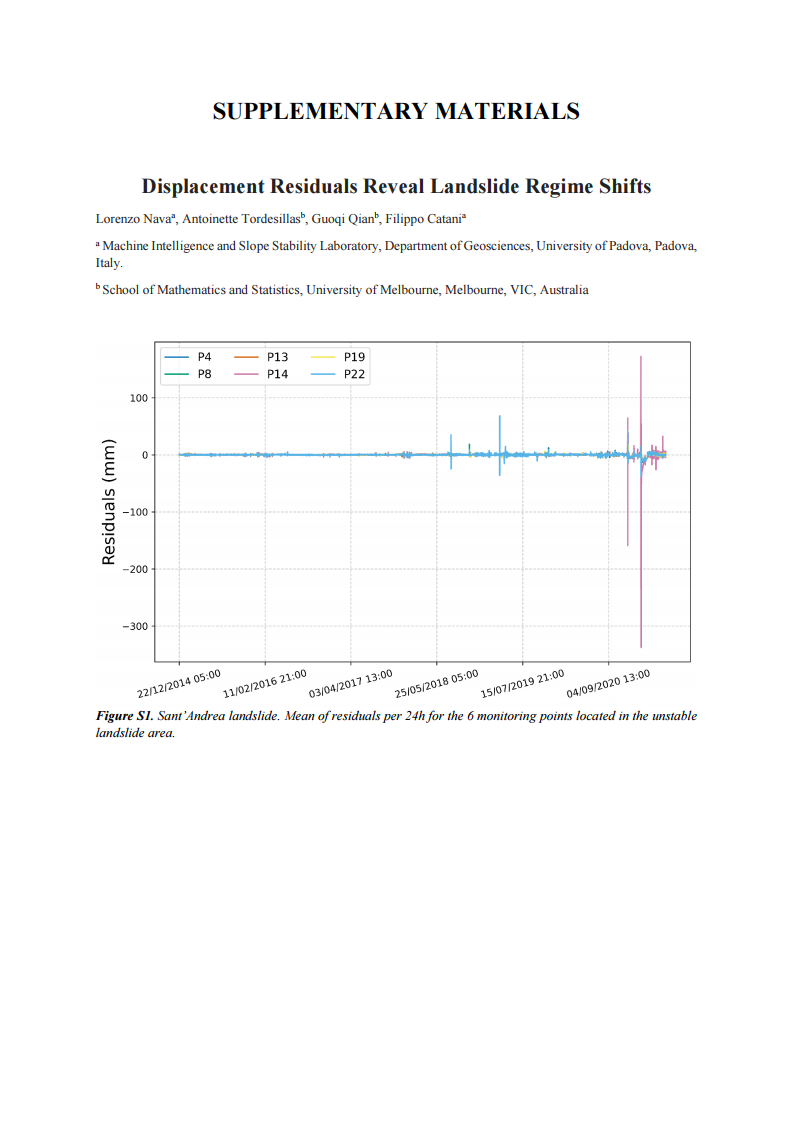
自 2013 年起,Sant’Andrea 滑坡区域已通过一套由机器人全站仪(RTS)和反光靶点组成的测量系统进行监测。本研究选用了以下九个反光靶点:P1、P4、P8、P9、P13、P14、P16、P19 和 P22。其中,P4、P8、P13、P14、P19 和 P22 所在区域存在显著位移,而 P1、P9 和 P16 所在区域相对稳定。值得一提的是,在 2021 年 6 月 9 日,P14 所在区域发生了一次小型滑坡。
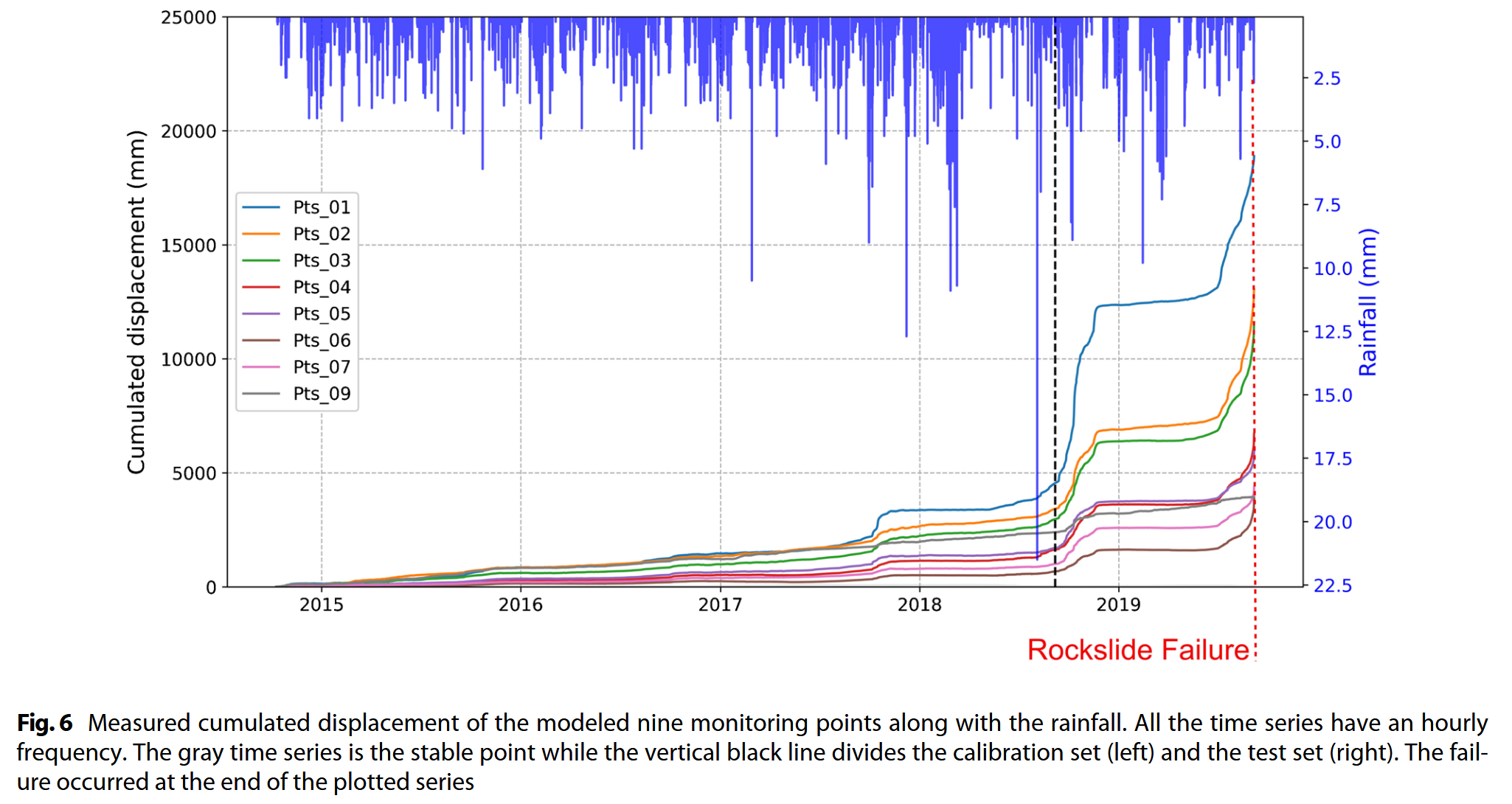
滑坡附近约 500 米处设有一个雨量计,用于记录降雨数据。图 2 显示了建模监测点的累计位移以及该雨量计测得的逐小时降雨量。
2.2 Pomarico 滑坡
Pomarico 村坐落在海拔约 450 米的一条狭长山脊上。2019 年 1 月,Pomarico 西南部城区因持续强降雨而发生大规模滑坡(见图 3)。这次滑坡导致支撑主干道路的挡土墙垮塌,造成住宅和商业建筑的破坏和损毁,并引发大规模人员疏散。

该区域的山坡地貌受多次历史滑坡影响,特征明显,表现为滑坡陡坎与洼地,并覆盖着部分沙质-粘土质堆积物,夹杂着脱落的岩块。滑坡邻近坡面的两侧存在古老和近期的滑坡体,其地貌特征显示出早期滑坡事件的再激活迹象,包括 1959 年和 1960 年发生的滑坡,这些滑坡呈旋转-平移滑动与土流特征。
2019 年 1 月 24–25 日的降雨显著改变了坡体的含水量和岩土力学条件,导致 1 月 25 日发生土流,而后于 1 月 29 日触发了向后推进的旋转-平移滑坡(Doglioni 等,2020)。最初滑坡被挡土墙暂时阻挡,但随着挡土墙变形,坡体发生解压,旋转-平移滑坡进一步演化。
Pomarico 西南坡的地质成分主要为沙质和粘土质沉积物,坡面上覆盖着夹有倾斜砂岩块体的滑坡堆积层,使该区域滑坡过程更加复杂。这些沉积物对滑坡敏感性具有关键作用,含水量变化和岩土条件的差异显著影响坡体稳定性。此外,存在的古老与新近滑坡体也进一步增加了坡面的不稳定性(Perrone 等,2021)。
上述地质特征与物质属性,加之降雨影响,共同决定了该地区滑坡的诱发机制及其发展过程。
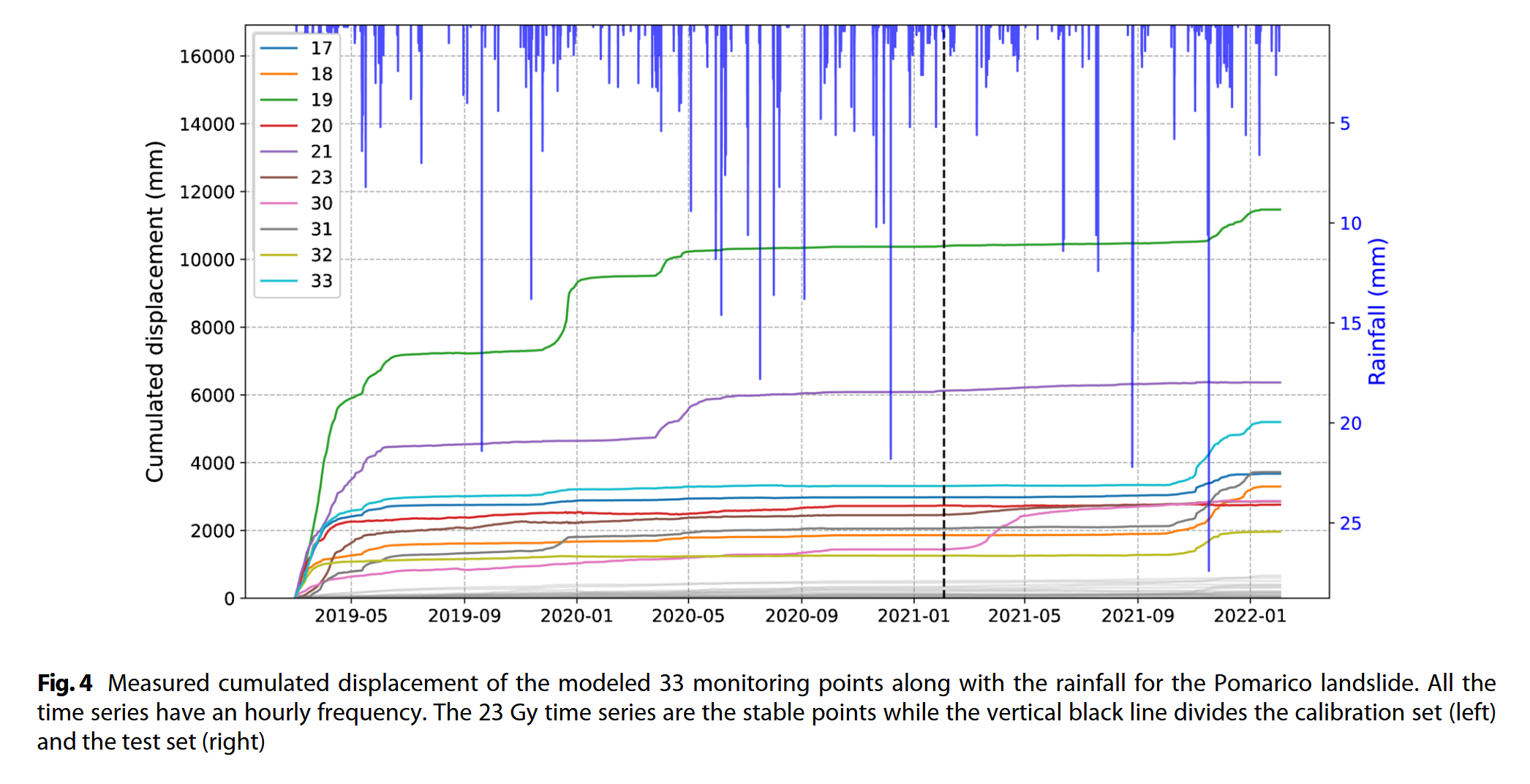
自 2019 年起,Pomarico 滑坡采用地基合成孔径雷达(GB-SAR)进行监测。本研究选用了全部 33 个监测点,其中 10 个(17、18、19、20、21、23、30、31、32、33)位于发生显著位移的区域,其余则分布在相对稳定区域。滑坡附近约 100 米处设有雨量计。图 4 显示了所有监测点的累计位移与该雨量计记录的降雨量数据。
2.3 Veslemannen 滑坡
Veslemannen 不稳定岩质斜坡位于挪威西部 Rauma 市的 Romsdalen 地区。Romsdalen 是一条长约 30 公里的 U 型冰蚀谷,切割于西部片麻岩区的结晶基岩中,该地区在加里东造山运动期间经历了变质作用(Saintot 等,2012)。冰盖在大约 15,000–13,000 年前开始变薄,在青年德干期(Younger Dryas)期间,谷地冰川曾延伸至峡湾区域。
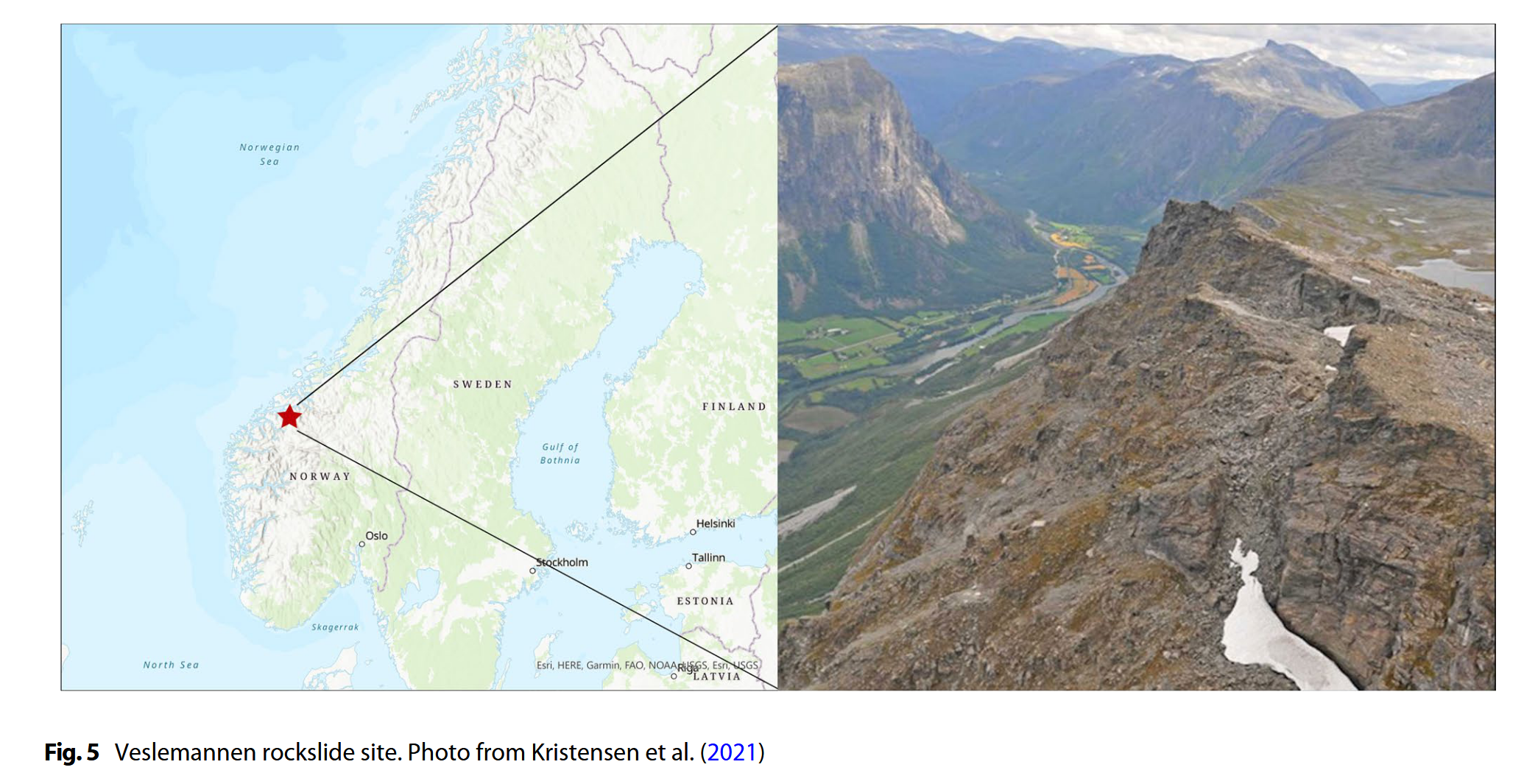
Veslemannen 所在的 Mannen 不稳定岩坡由高度褶皱和变形的高级变质岩组成。这些岩体呈东西走向近垂直片理,沿南北走向裂隙发生重力张裂。Mannen 区域提出了不同的变形机制,包括平移滑动和具有阶梯状滑面特征的楔形破坏。该区域的地质结构与地形条件使其极易发生边坡垮塌。Romsdalen 谷地是挪威后冰期岩质滑坡密度最高的区域之一。
Veslemannen 坡面的坡度在 45° 至 50° 之间,前缘坡段更陡,达 70°(Hilger 等,2018)。上部区域岩体高度破碎,散布着松散块体;中部区域为破碎岩层;而坡脚处则由相对完整的岩石构成,并包含一个被称为 “Spiret”(尖塔)或 “the Tower” 的岩柱,被认为是上部坡体稳定的关键块体。
该滑坡体的上界位于海拔 1220 米处,由一条充满积雪的张裂缝标示。Veslemannen 的大部分位移及最终破坏沿着后缘裂缝下方的平行横向裂缝发生。滑坡总体估算体积约为 120,000–180,000 立方米,但 2019 年 9 月的实际垮塌体积为约 54,000 立方米。
该滑坡自 2009 年起即采用多种实时监测设备进行持续观测。使用的设备包括:GNSS 天线、激光测距仪、伸缩计、倾斜仪、钻孔监测仪器、网络摄像头、气象站和地基干涉雷达系统。本研究中使用高频地基合成孔径雷达(GBSAR)系统进行验证。
滑坡附近约 150 米处设有雨量计。雷达自 2014 年 10 月 6 日起便持续安装于 Lyngheim 谷底(见图 6)。八个监测点中有七个位于最终垮塌区域。关于该滑坡的更多信息可参考 Kristensen 等(2021)研究。
3. 方法论
LRSD(Landslide Residual Standardized Deviation)方法分为两个阶段:校准阶段与部署阶段。
3.1 校准阶段
LRSD 的校准阶段为每个监测点提供了一种客观方法,以基于其历史变化行为确定一个临界残差位移值 r ∗ r^* r∗。该阶段包括一个四步流程,在指定的历史时段内每小时重复一次,以识别 r ∗ r^* r∗。
该过程会为每个监测点输出一个
r
∗
r^*
r∗ 值,
r
∗
r^*
r∗ 表示24小时预测期内残差均值
r
ˉ
\bar{r}
rˉ 的累积分布函数(CDF)达到 0.999 的临界值。训练/预测窗口会每小时向前滑动(参见图7)以进行评估。
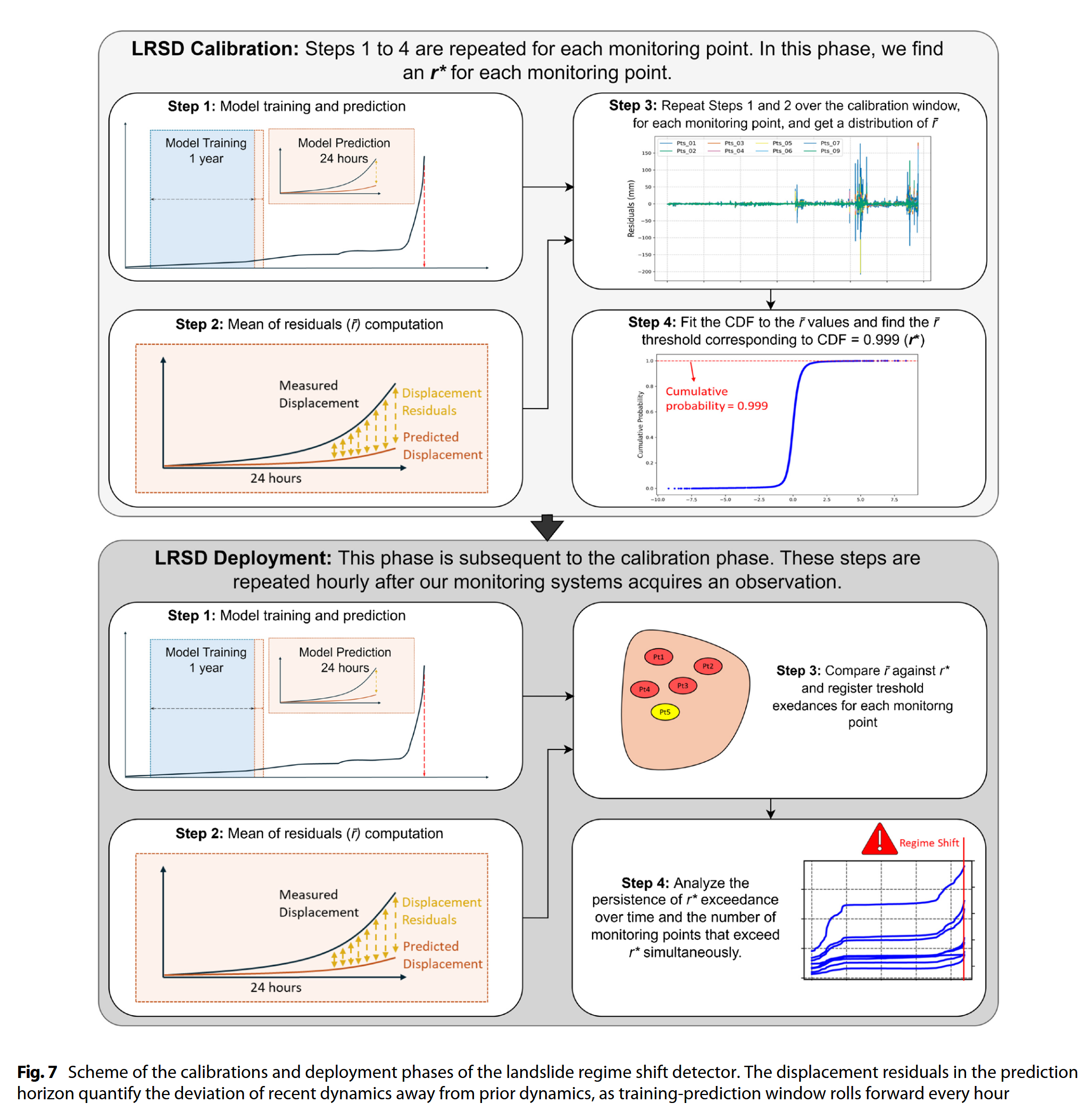
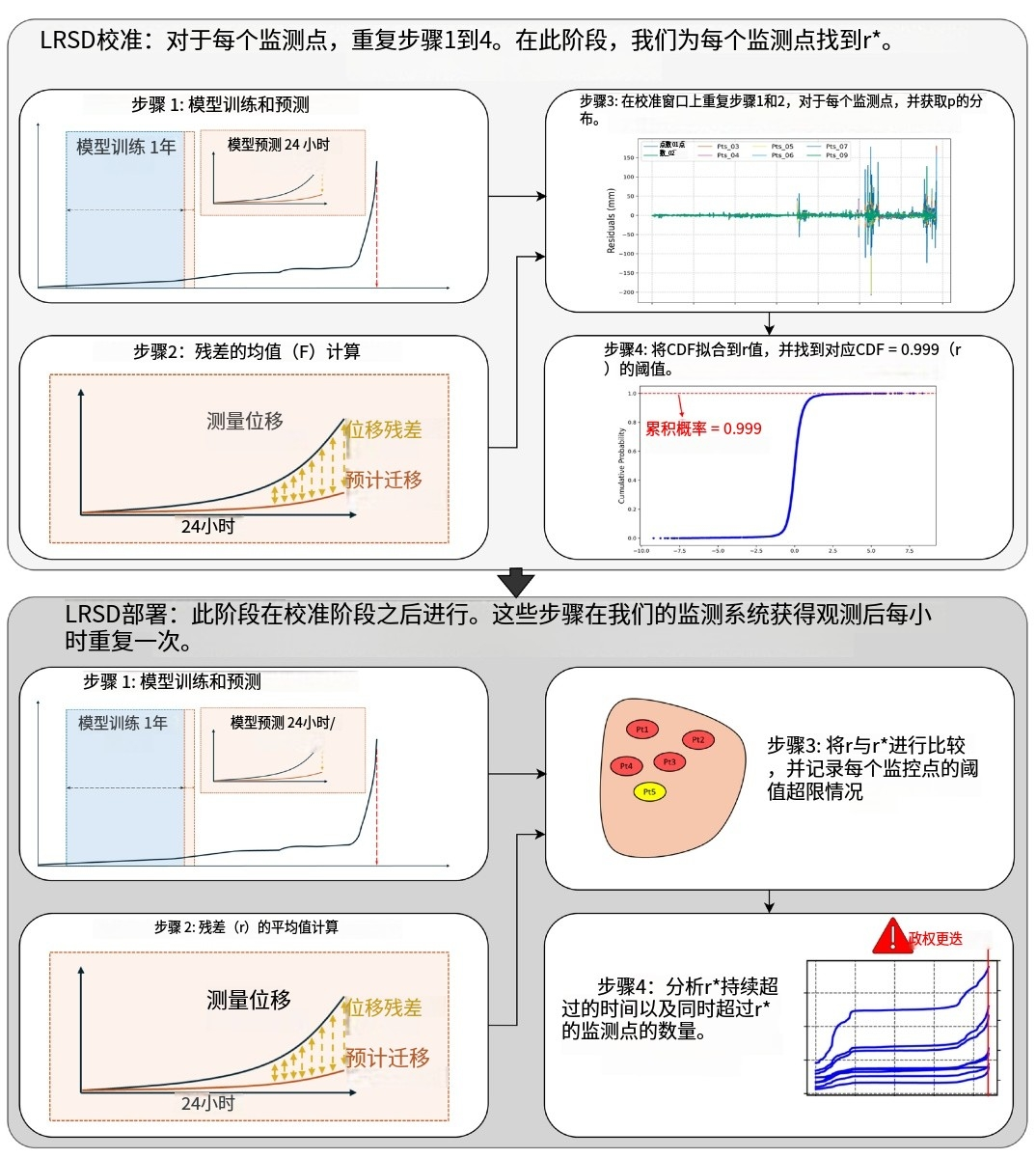
3.2 部署阶段
部署阶段采用相同的四步流程来评估最近一小时内整个监测区域的滑坡动态,以判断是否应触发预警。在该阶段,将新的 r ˉ \bar{r} rˉ 与已校准的 r ∗ r^* r∗ 进行比较。
此外,为考虑群体动态特征,还引入了两个因素:
- 阈值超越的时间持续性;
- 同时超越阈值的监测点数量(见图 S10)。
3.3 数据驱动的滑坡位移建模
滑坡运动受各种外部因素(特别是降雨和水库水位变化)影响,其非线性特性使得预测极具挑战性。近年来,人工智能(AI)——尤其是机器学习(ML)和深度学习(DL)技术——在滑坡位移预测方面展现了显著成效。这些方法不仅使用滑坡本身的位移数据,还可考虑促发因素,从而提高预测精度(Gao 等,2022;Nava 等,2023;Zhang 等,2022)。
然而,为达到最佳预测性能,这些模型通常需要反复调参与大量计算资源,这在需要快速决策的实时场景中存在局限。此外,这些模型通常为静态模型,在应对滑坡行为的动态变化时缺乏自适应性(Nava 等,2023)。
滑坡模式和环境条件可能因天气变化、人类活动,特别是滑坡体内部的地质力学变化而改变(Marmoni 等,2023;Petley 和 Allison,1997;Ye 等,2022)。传统模型一旦训练完毕,如不重新训练,便无法适应这种变化。这种缺乏适应性的缺点在滑坡风险管理与预警系统中尤为重要(Intrieri 等,2013)。滑坡行为可能出现状态转变或突发异常,这常常难以被静态模型捕捉。
为克服上述问题,统计向量自回归(VAR)时间序列模型正成为一种可行替代方案(Wang 等,2020)。例如,Qian 等(2021)使用误差修正协整(ECC)与 VAR 技术应对滑坡的非平稳性与非线性特征;Zheng 等(2023)则进一步使用 ECCVAR 处理高维向量时间序列中的非线性趋势。
Tordesillas 等(2024)将这些模型整合进增强智能平台,用于“假设情景”分析,其在滑坡早期预警和风险缓解中展现了良好前景。
本研究中,数据驱动的 ECC-VAR 模型被设计为能够“学习”并适应地面条件的变化。通过结合历史多地点的位移时间序列与关键外生变量——降雨,模型可同时预测所有监测点的位移。
ECC-VAR 是一种多变量时间序列模型,可分析变量间的长期关系(Wang 等,2020;Qian 等,2021)。
3.4 ECC-VAR 公式
该模型使用如下公式:
Δ y t = α ( β ′ η ) ( y t − 1 − 1 D t − 1 p o ) + ∑ i = 1 p − 1 Γ i Δ y t − i + ∑ j = 1 p − 1 Y j Δ x t − j + u t \Delta y_t = \alpha (\beta' \eta) \left(\frac{y_{t-1} - 1}{D_{t-1}^{po}}\right) + \sum_{i=1}^{p-1} \Gamma_i \Delta y_{t-i} + \sum_{j=1}^{p-1} Y_j \Delta x_{t-j} + u_t Δyt=α(β′η)(Dt−1poyt−1−1)+i=1∑p−1ΓiΔyt−i+j=1∑p−1YjΔxt−j+ut

各符号含义如下:
- y t y_t yt:表示第 t t t 时刻的 N × 1 N \times 1 N×1 位移向量(共 N N N 个监测点);
- x t x_t xt:外生变量(如降雨),为标量;
- Δ y t = y t − y t − 1 \Delta y_t = y_t - y_{t-1} Δyt=yt−yt−1;
-
D
t
−
1
c
o
D_{t-1}^{co}
Dt−1co:关于
t
t
t 的确定性函数,取决于模型中的设定:
- 若
deterministic = ci,则 D t − 1 c o = 1 D_{t-1}^{co} = 1 Dt−1co=1; - 若
deterministic = li,则 D t − 1 c o = t − 1 D_{t-1}^{co} = t - 1 Dt−1co=t−1; - 若
deterministic = n,则 D t − 1 c o = 0 D_{t-1}^{co} = 0 Dt−1co=0;
- 若
- Γ j \Gamma_j Γj: N × N N \times N N×N 阵列,表示 Δ y t − j \Delta y_{t-j} Δyt−j 对 Δ y t \Delta y_t Δyt 的影响( j = 1 , 2 , … , p − 1 j = 1, 2, \dots, p - 1 j=1,2,…,p−1),使用广义最小二乘法(GLS)估计;
- Υ j \Upsilon_j Υj: N × N N \times N N×N 阵列,表示 Δ x t − j \Delta x_{t-j} Δxt−j 对 Δ y t \Delta y_t Δyt 的影响;
- α \alpha α:调整矩阵,表示误差修正项的速度;
- β \beta β:协整矩阵;
- η \eta η:确定性趋势项;
- u t u_t ut:误差项。
训练与预测流程为:将训练窗口滑动,逐步拟合公式(1)并预测测试窗口中的 y t y_t yt,得到预测残差后评估其经验 CDF 是否偏离模型(1)下的期望分布,从而判断是否进入三级滑坡加速阶段。
该方法不同于 Wang 等(2020)和 Qian 等(2021),他们假设测试窗口数据在预测时尚未观察。
ECC-VAR 的实现是使用 Python 编程语言完成的,具体采用了 statsmodels 库进行分析(Lütkepohl,2005)。模型的校准基于一组历史位移数据和相应的降雨数据,这些数据均以小时级频率采集。为了确保模型的准确性,采用了逐小时前向验证技术,进行严格的验证。在这一过程中,模型会反复进行训练、预测(提前 24 小时)和验证,这一循环在整个校准阶段的每一个小时中执行。该模型每轮处理时间不超过 1 分钟,因此该重复过程可以迅速完成。
此预测方案的一个显著特征是:训练集采用固定长度的滑动训练窗口。随着新数据的到来,最早的数据将被移除,从而确保模型始终学习最新的滑坡状态。这种适应性使模型能够应对滑坡行为的潜在变化,例如进入三级蠕变阶段(tertiary creep) 等机制变化。
本研究中的 ECC-VAR 模型支持多点位移的同时预测,这对于构建高效的预警系统至关重要。通过将降雨作为外生变量纳入模型,ECC-VAR 能提供更准确、可靠的滑坡活动预测,使得应对滑坡风险的措施更加有效。
我们还对不同降雨滞后时间的预测效果进行了消融分析,并对模型参数进行了精细调参,以获得最佳预测性能。ECC-VAR 在校准集上经过严格优化和调试,以确保其能准确预测由降雨引发的加速现象。
需要强调的是,ECC-VAR 并不对预测特定的滑坡速度施加限制。训练窗口的长度设为 1 年,因为延长时间并未带来显著的性能提升,反而缩短窗口会削弱识别滑坡加速关键触发因素的能力。预测窗口设定为 24 小时,以系统性地考虑日常周期性因素,同时利于提取稳定的平均值,这对于后续残差计算至关重要。
我们通过消融实验对超参数进行优化,比较不同设置下的前向验证得分,包括:
- 时间滞后 p p p(取值为 2、4、6、8、10、12、14、16、18、20、24);
- 不同确定性项设置:
- 无确定性项;
- 协整关系外的常数项;
- 协整关系内的常数项;
- 协整关系外的线性趋势;
- 协整关系内的线性趋势;
- 以上所有组合。
模型参数通过最大似然估计(MLE) 方法进行估计。时间滞后数 p p p 决定了模型中包含多少阶差分项,是对差分后数据的自回归过程的阶数。在 ECC-VAR 模型中,使用差分变量是为了捕捉系统的短期动态,因为这些变量更可能是平稳的。
误差修正项中的
D
t
−
1
c
o
D_{t-1}^{co}
Dt−1co 引入了一个确定性效应;而该项的其他部分则用于将原本非平稳或呈趋势的内生变量(位移)转化为平稳过程。协整秩(cointegration rank)在每次训练模型之前通过 statsmodels 中内建的 select_coint_rank 函数动态重新确定。
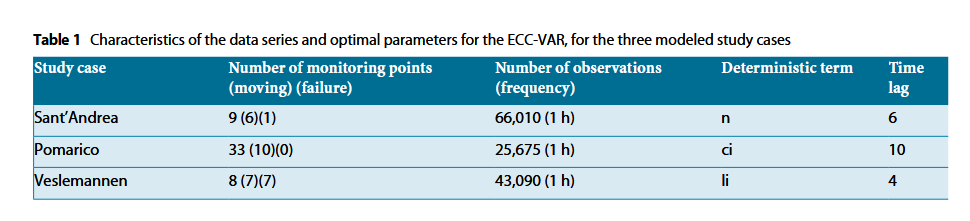
表 1 展示了各研究案例的最优参数设置、监测点数量与观测值数量。用于校准的数据包含在校准集内(详见图2、图4与图6)。
在模型运行过程中,当系统遭遇意外(爆发式)滑坡加速时,ECC-VAR 模型通常会在初期低估位移。然而,一旦这些加速数据被纳入训练集,模型便会调整至新的趋势,随后在滑坡速度下降时则可能高估位移。这表明 ECC-VAR 模型在处理由外部变量引发的爆发式非平稳性与非线性效应方面存在局限。
本研究并不打算开发超越 ECC-VAR 的更高级统计模型来解决这一问题。相反,我们将在后续章节中利用这种模型的局限性,构建一个基于残差的滑坡预警系统(参考:Gouriéroux and Zakoïan, 2017;Phillips and Shi, 2020;Blasques et al., 2022;Phillips et al., 2011)。
4. 基于残差的滑坡预警系统
本研究提出的滑坡预警服务系统基于每个监测点预测位移与实测位移之间的残差值,其方法参考了 Jiang 和 Chen(2022)所提出的框架。具体而言,对于每一个预测的 24 小时周期,系统计算该周期内所有时刻残差的平均值,即预测与实测位移的差值的平均值,称为残差位移(residual displacement)。
为了进一步分析残差行为,预警系统使用了一种核平滑方法(Kernel Smoothing) 来估计这些残差的概率分布。该方法是一种非参数、非正态分布估计方法,被称为核密度估计(KDE, Kernel Density Estimator)(Chen, 2017)。KDE 被用来计算每个监测点在每一时间段内残差值的累积分布函数(CDF)值。
如果某一监测点的残差对应的 CDF 值超过某个临界阈值(例如 0.999),则表明该点处于潜在失稳的风险中。已有研究表明,KDE 能更好地拟合残差分布,从而减少误报数量(Jiang 和 Chen,2022)。
为了定义合理的预警阈值,研究测试了两种不同的策略:
-
动态阈值策略:每小时根据当前残差分布重新拟合分布,并将当前残差值与其对应的 CDF 值(如 0.999)进行比较。此方法可以有效减少误报数量。然而,在出现极端残差值之后,阈值的敏感性会显著下降,因为这些极端值可能使阈值被设得过高,从而导致后续即使出现较大残差也无法触发预警。
-
历史阈值策略(更保守):使用整个校准期内的残差数据拟合分布,并据此设定统一的 CDF 阈值(仍为 0.999),在整个测试集期间(每个案例为 1 年)保持不变。采用此方法可避免极端残差对阈值的短期影响,更适合实际运行的预警系统。
在此研究中,选择使用 CDF 值大于 0.999 作为触发预警的判据,是因为我们关注的是模型严重低估滑坡位移的情形(即残差为正且较大),而非高估的情形(因此不考虑 <0.001 的 CDF 值)。这一选择与现有文献一致(Jiang 和 Chen,2022)。
具体地,残差阈值是基于每个不稳定区域内(有滑动)的监测点在校准窗口期间的残差分布单独计算的。这意味着每个滑动点都会拥有一个专属的残差阈值。
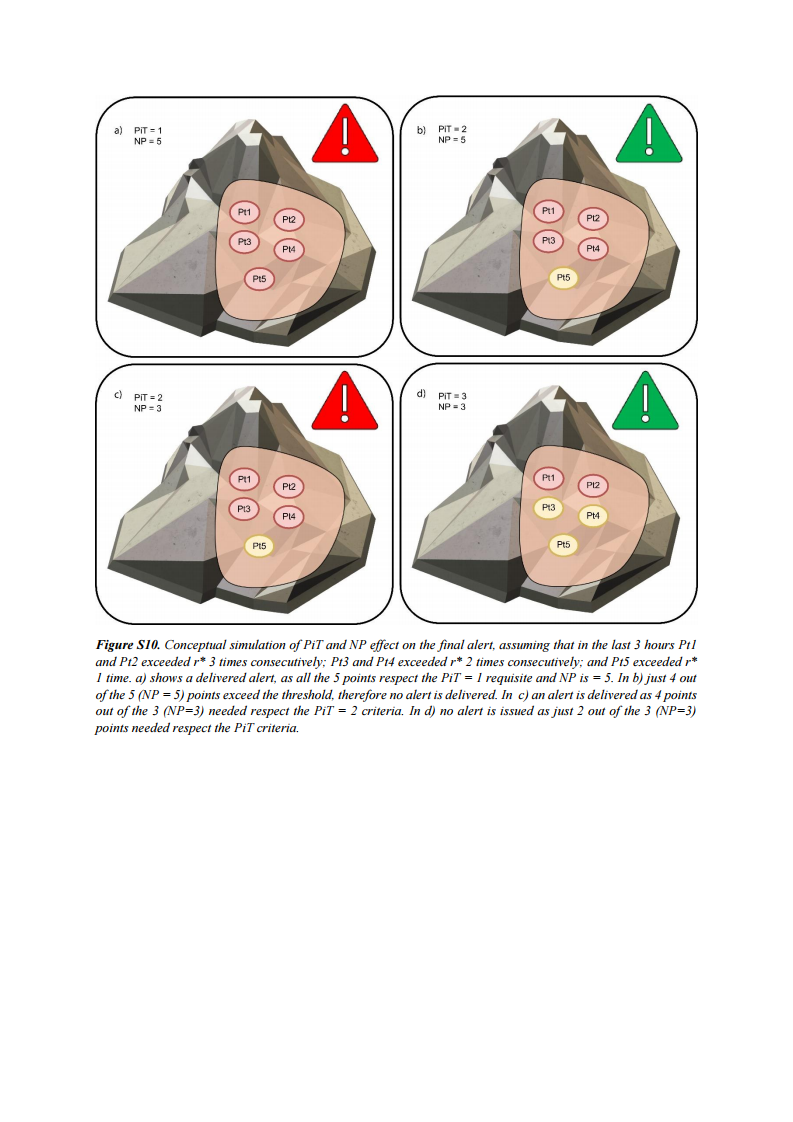
为了引入群体动态信息,从而更有效识别**颗粒系统中“滑坡临界破坏前阶段”(PFR,Precursory Failure Regime)**的前兆特征,本研究引入了两个额外因素:
- 时间持久性(Persistence in Time,PiT):表示一个点的异常状态持续的时间长度;
- 超阈值监测点数量(Number of Points,NP):表示当前时间段内多少个点的残差超过其自身的预警阈值。
这两个因素会直接影响最终的预警发出机制,具体效果可参考补充材料中的图 S10。此外,PiT 与 NP 与 PFR 动力学之间的关系将在“颗粒系统中前兆破坏阶段的一般动力学特征”章节中进一步讨论。
5. 结果
我们展示了模型预测结果以及最终预警服务的表现,涵盖三个不同的案例研究。每个案例单独展示,以此评估所实施方法在不同滑坡预测和预警场景中的性能和有效性。整个过程采用 Python 编程语言开发,所有实验在运行 Windows 系统的计算机上完成,设备配备为第三代 Ryzen Threadripper 3990X CPU。
5.1 Sant’Andrea 滑坡
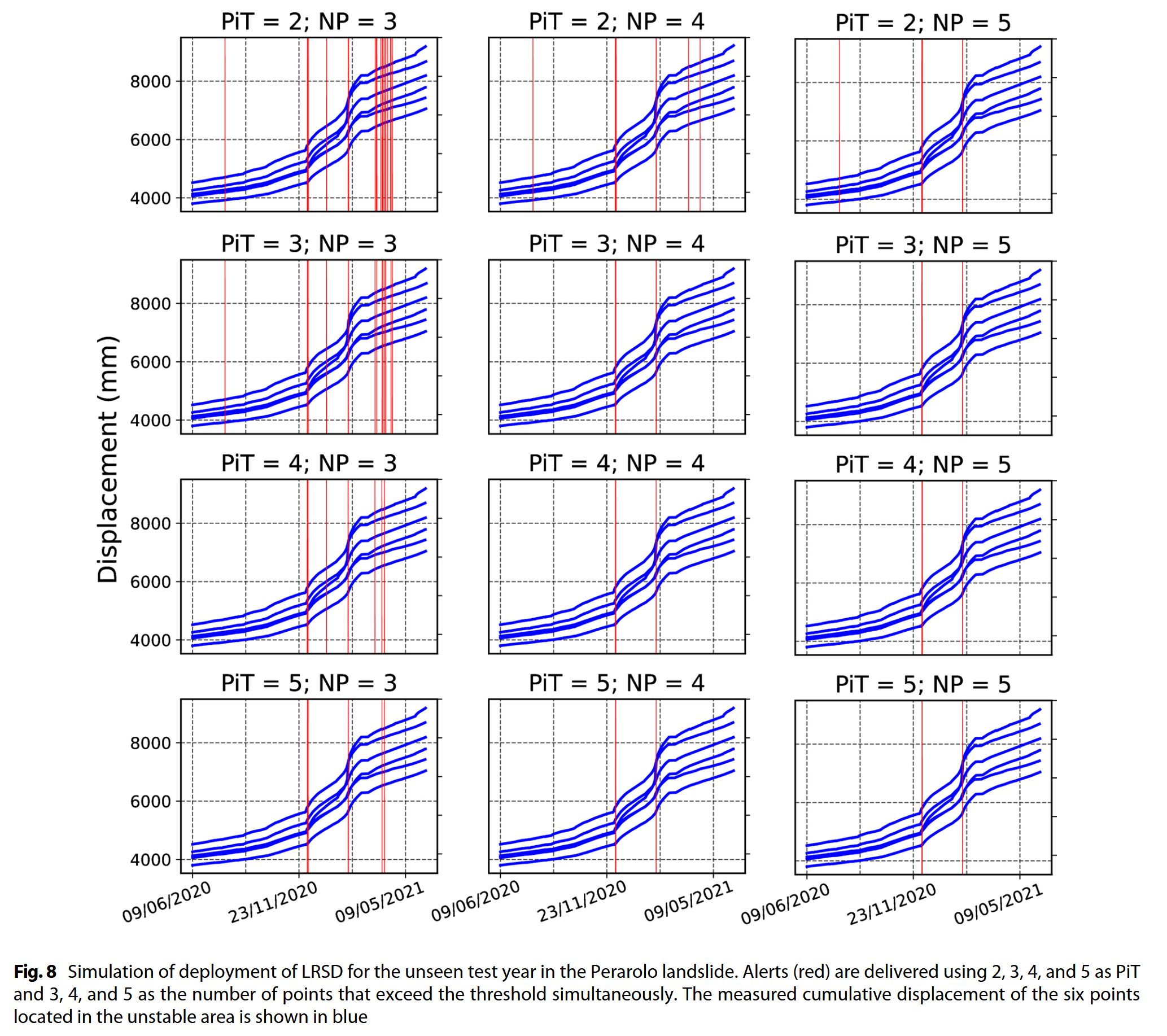
从 2020 年 6 月 9 日至 2021 年 6 月 9 日,该滑坡表现出显著变化,呈现出突发性强烈加速,并伴随位移速率整体上升(见图 2)。我们选取这一年作为参考期,以评估 LRSD(滑坡残差驱动预警系统)的性能,特别是在应对滑坡剧烈动态行为时的表现。所分析的时间序列频率为小时级别,测试集包含 8760 个观测点,校准集为 57,177 个观测点。
模型训练完成后,对滑坡区域的 9 个监测点进行 24 小时位移预测(其中 6 个点存在持续滑动行为,3 个位于相对稳定区域)。使用整个预测窗口期内的降雨量作为外生变量输入。将预测结果与实测位移值进行比较,以评估模型准确性。
在 2020-2021 年这一参考年内,残差开始变得不稳定,尤其是监测点 P14,在图中数据末尾发生破坏(见图 2)。该案例中,ECC-VAR 模型的最佳参数为:去趋势阶数为 0,滞后阶数为 6,无确定性项(“n”)。通过排除确定性项,模型假设位移行为完全由历史内部关系决定,而无需考虑固定的外部干扰因素(这一假设对降雨外生变量不适用)。
模型在校准集与测试集上的整体 RMSE 为 5.03 毫米。该值相对较高,主要是由于该年度滑坡的剧烈活动所致(见图 2)。外部变量的消融分析显示,当考虑当前降雨及前 18 天内的降雨量时,模型性能(RMSE)最佳。
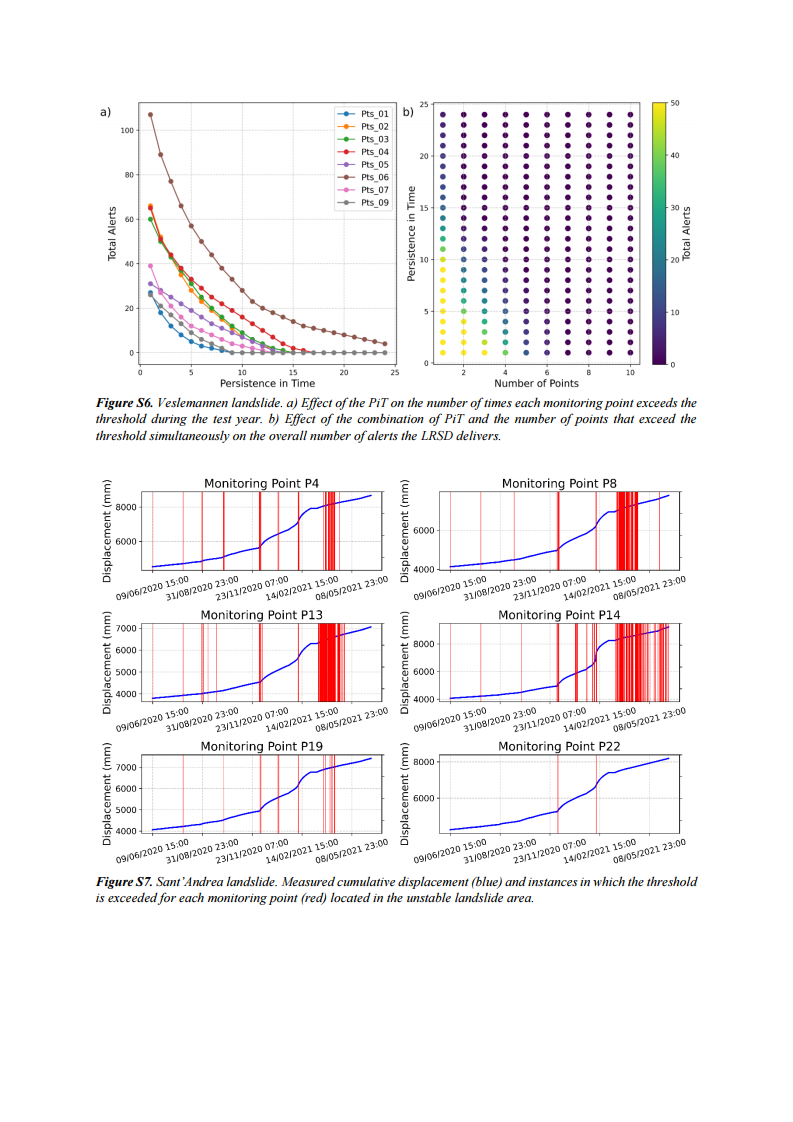
我们拟合了截至 2021 年 6 月 9 日的位移残差分布。监测点 P14 在整个评估年中呈现出持续不稳定性(见图 S7),在一年中总共有 380 次超过阈值。然而,在 Sant’Andrea 滑坡中,单个监测点的异常并不足以对 Perarolo 村构成严重威胁。因此,我们希望避免系统在这种局部性异常下触发全局预警。
图 8 显示了引入 PiT(时间持久性) 与 NP(超阈值点数量) 后预警系统的效果改进。若设置 NP = 4(即有 4 个点同时超过阈值)且 PiT = 3(每个点需持续 3 小时异常),那么最终仅留下 两个最关键的预警事件,显著减少误报数量。
5.2 Pomarico 滑坡
与 Sant’Andrea 滑坡不同,Pomarico 滑坡在校准期与测试期内行为相对一致。在该案例中,我们旨在评估 LRSD 在滑坡行为相对平稳时的表现。
模型训练后,对 33 个监测点进行位移预测(其中 9 个点有滑动行为,24 个点相对稳定),考虑整个预测窗口内的降雨数据作为外生变量输入。校准集包含 16,915 个观测点,测试集同样为 8760(见图 4)。
本案例中,ECC-VAR 模型的最佳参数为:去趋势阶数为 0,滞后阶数为 10,确定性项为“ci”,即在协整关系内包含线性趋势,表明位移序列具有一定的趋势性。
该模型在校准集与测试集上的整体 RMSE 为 0.12 毫米。外生变量的消融分析发现,最佳结果出现在考虑 当前日至前 72 天(以 3 天为间隔)降雨量的情况下。
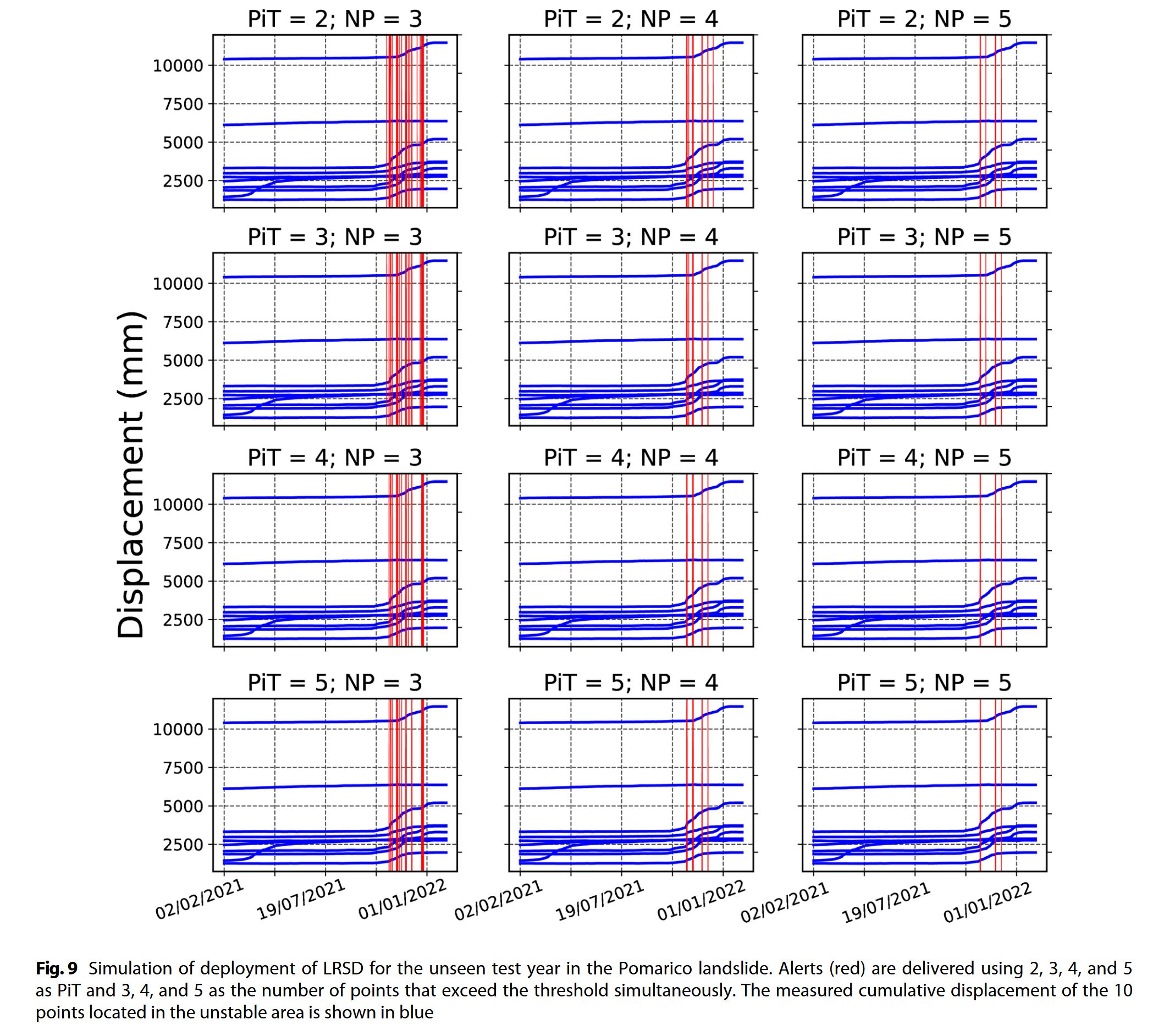
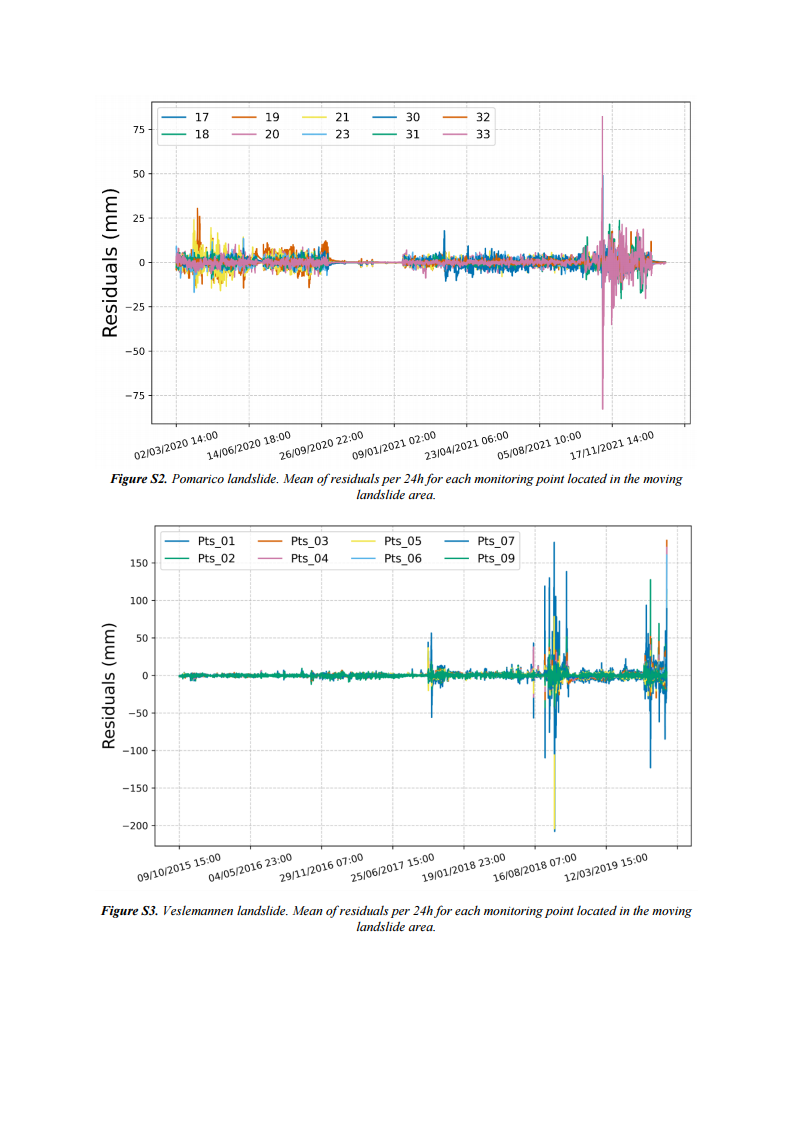
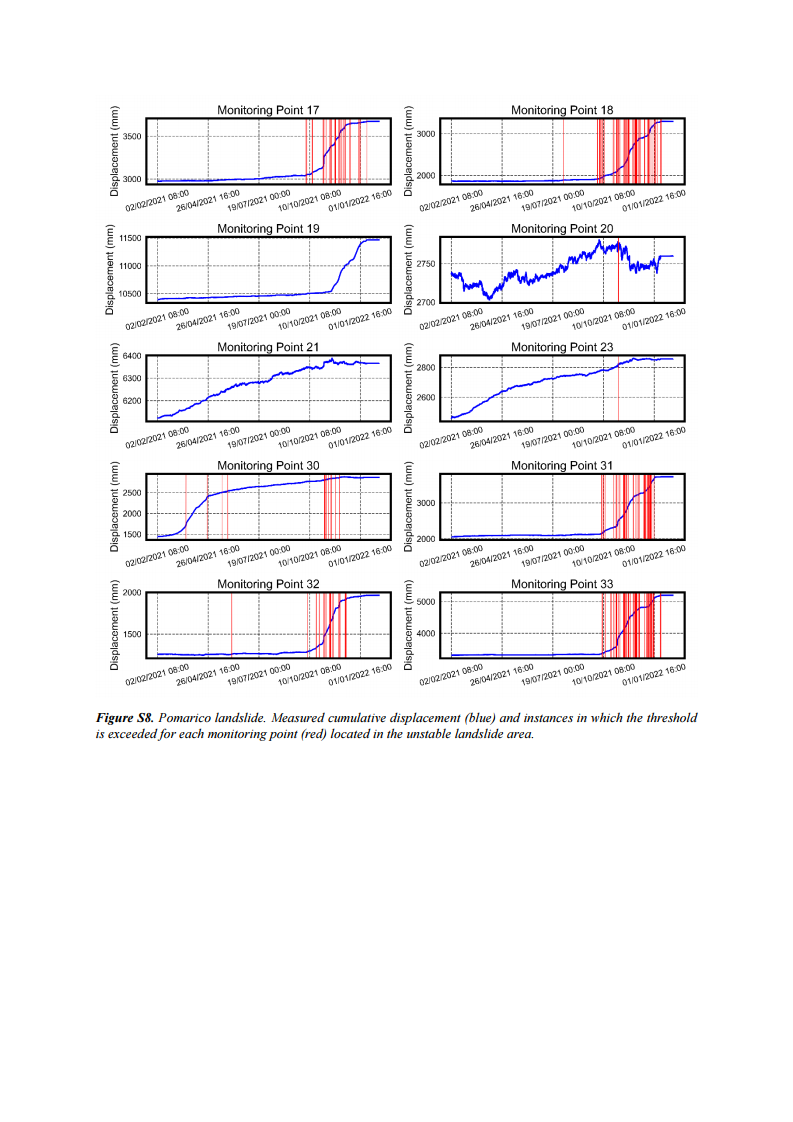
我们拟合了截至 2021 年 2 月 2 日的残差分布(见图 S2)。大多数时间序列的残差相对稳定,从 2020 年 9 月至 2021 年 1 月,由于监测仪器问题,残差幅度显著下降。时间序列末尾残差略有上升,特别是监测点 33出现显著不稳定。这构成了下一年度预警触发的核心。
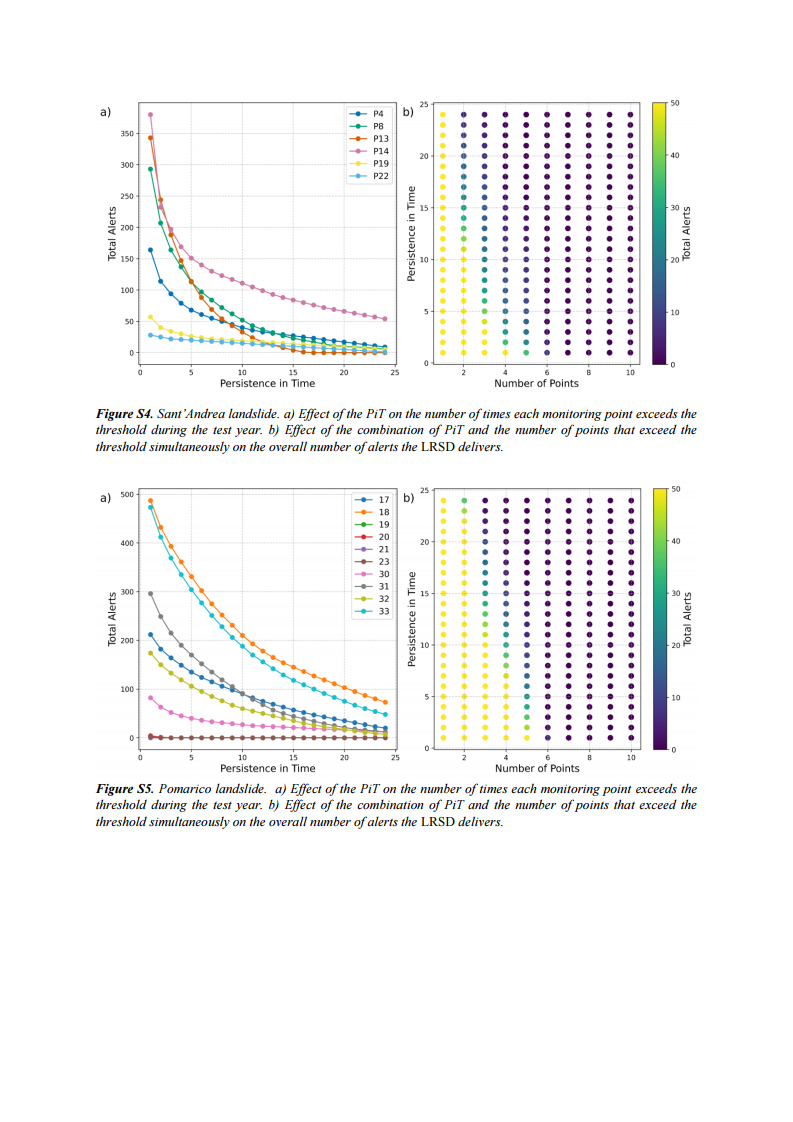
在两次关键加速期间,共有 6 个监测点持续超过预警阈值。如同 Sant’Andrea 案例,也存在个别监测点偶尔超出阈值的情况(见图 S8)。通过将时间窗口延长至超过一小时,我们观察到预警次数明显减少(见图 S5),表明许多预警事件只是短暂的噪声而非稳定趋势。
图 9 展示了将 PiT 与 NP 结合后的效果。该策略显著减少了误报数量,仅在真正关键时刻触发预警。
5.3 Veslemannen滑坡
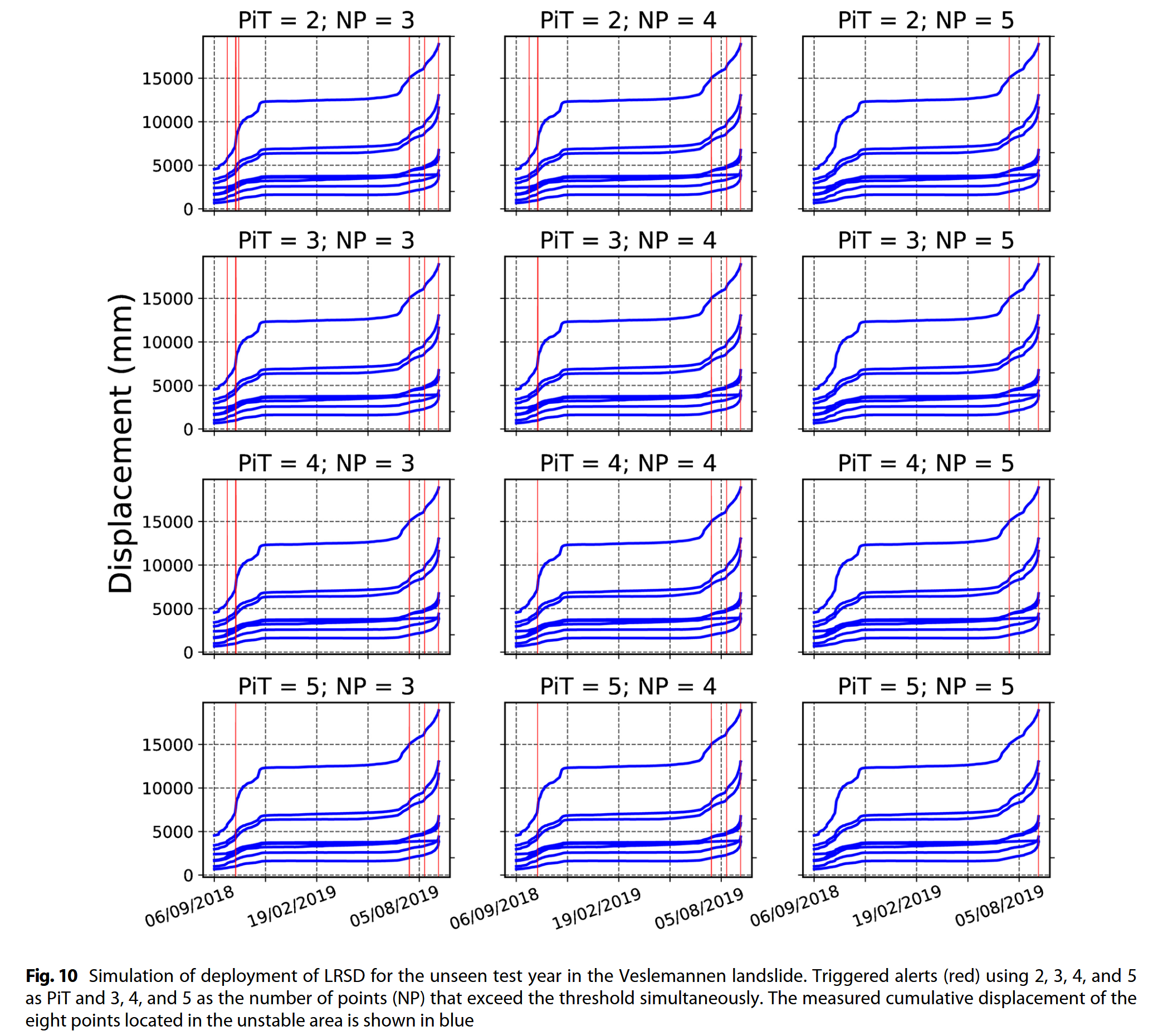
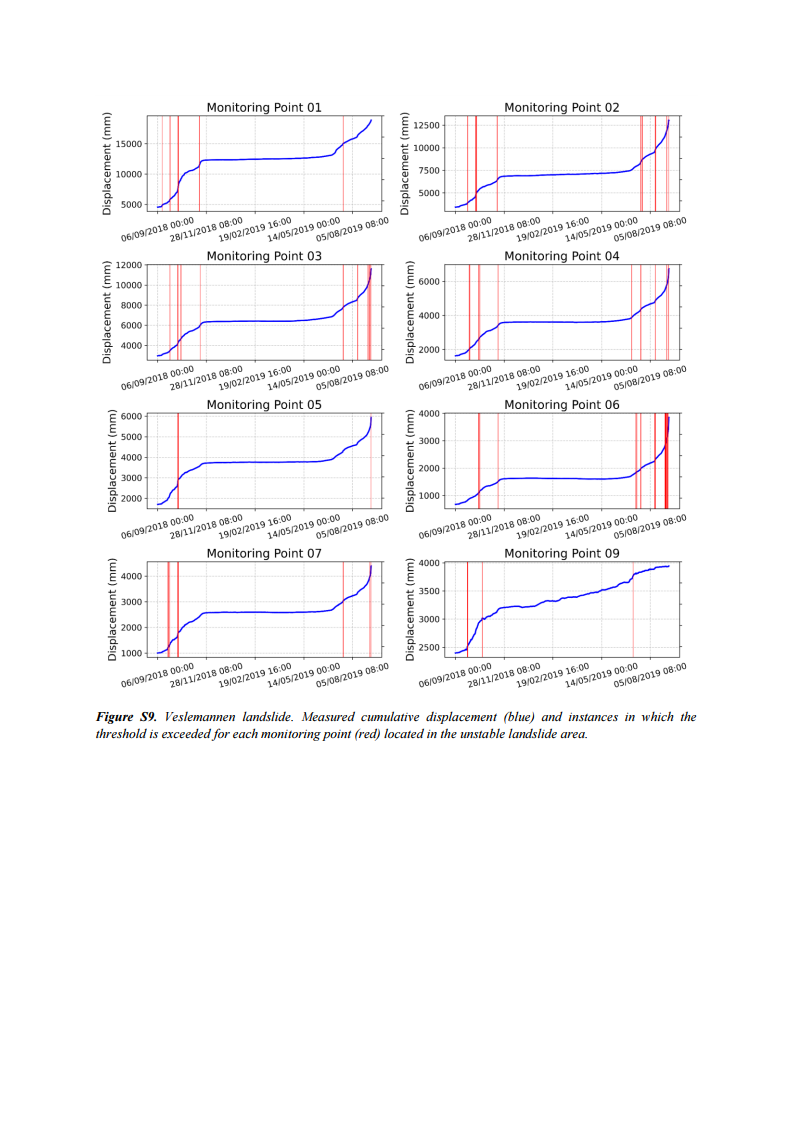
在过去一年中,Veslemannen滑坡的行为发生了显著变化,出现了两次突然的强加速和整体位移速率的增加(见图6)。在测量位移的最后阶段,即2019年9月5日20:58,岩体发生了破裂。
此最后一年的数据被用作LRSD的测试集,因为我们希望评估和分析该服务在具有强动态行为和破裂的滑坡中的表现。所分析的时间序列的频率为每小时一次,这意味着测试集由8760个观测值组成,而校准集由34330个观测值组成。正如Kristensen等人(2021年)强调的那样,Veslemannen滑坡的加速部分是由雪融水引发的。然而,为了保持数据序列频率的一致性,我们在本研究中排除了雪融水的建模。
值得注意的是,我们的系统设计可以在没有所有协变量或协变量与滑坡运动高度相关的情况下有效运行,正如在本例中所示。在模型训练后,它用于预测滑坡上九个监测点的位移,预测窗口为24小时(其中八个监测点持续移动,一个稳定),并考虑到整个预测窗口内的外生变量降雨量的测量值。然后,可以将预测的位移值与实际位移值进行比较,以评估模型的准确性。
与Sant’Andrea案例类似,可以明显看出残差的幅度增大,尤其是在两次主要的测试年加速发生时(见图10)。ECC-VAR在以下参数设置下产生了最佳结果:去趋势阶数为0,滞后值为4,"li"作为确定性趋势。这意味着位移具有二次趋势。经过精炼模型的校准集和测试集的综合RMSE为4.41毫米。聚焦外部变量的消融分析表明,考虑到从当前日起至前27天的降雨量(以3天为间隔)的最佳结果。
然而,在这种情况下,降雨模式变化对模型性能的影响表现出一些模糊性。这种模糊性源于雪融水对滑坡加速的显著影响。因此,降雨与位移之间的关系在某些情况下呈现出明显的非线性。然而,我们选择不将雪融水纳入模型,因为我们优先考虑保持每小时的时间序列频率。
从本质上讲,建模雪融水将需要将数据转换为每日间隔。我们拟合了截至2018年9月6日的残差分布。如预期的那样,在异常加速开始时,阈值水平被突破。呈现的位移时间序列的结束与岩体破裂的时刻一致。负责测量最大位移的监测点01,在破裂事件前没有突破阈值。
相反,位于破裂区域的其他监测点迅速突破了定义的阈值。当将PiT延长到超过一小时时,警报频率显著下降。大量警报发生在不规则的间隔中,而不是定期发生(见图S9)。
再次地,警报发生频率随着时间间隔的增加而显著下降,表明许多警报并不代表持续的模式,而是偶发且不规则的事件(见图S6)。某些监测位置显示整个测试数据集内存在许多错误警报,尤其是在下半年,特别是在31、32和33号监测点。然而,这些警报与滑坡加速有明显的关联。
图10显示了PiT与NP组合的有效性,这种组合可以减少警报的数量,将其限制在最关键的时刻,尤其是在破裂前。
6. 讨论
所提出的警报系统旨在检测给定位移规律的正偏差,并可以与传统的警报系统(如位移速度阈值)结合使用,增强操作性滑坡早期预警系统(Lo-LEWS)的冗余性和警报结果的可信度。该系统假设集体滑坡行为的剧烈变化是最关键的事件。这意味着,如果滑坡发生加速,且预测模型能够准确预测相同时间和位置的位移值,则不会触发警报。而当模型未能准确预测一个小的加速时,则被视为滑坡行为的变化。随着模型逼近真实情况,上述假设将更加正确。
任何由外部因素(如地震或人为活动)引发的加速,都将被视为对历史滑坡行为的偏离。然而,并非所有偏离模型的滑坡行为都会触发警报,因为CDF中的阈值可以排除大多数常见的残差值。此外,我们只认为当模型低估位移时才是关键,而非相反。需要注意的是,ECC-VAR模型只能捕捉所涉及变量之间的线性关系。然而,它考虑了变量之间的空间和瞬态时间依赖性,因此能够建模随机现象中的时空关系。
6.1 与颗粒系统中的预兆失效规律的通用动力学联系
自组织模式形成或集体运动是复杂系统的一个关键特性,已被证明能够预测接近临界过渡时的突现行为(Moon和Lu,2015;Scheffer等,2009)。这在导致灾难性失效的颗粒系统中尤为适用。在这种背景下,全面采样在揭示预兆失效规律(PFR)的独特动力学中发挥着至关重要的作用。无论是在小规模的受控实验样本中,还是在大规模山坡上,PFR中的运动都会表现出特定的动力学特征,如聚类模式(Tordesillas等,2021,2018;Zhou等,2022)。在没有缓解因素的情况下,全面描述这一运动模式表明,随着失效的临近,模式变得更加显著,且在空间和时间中持续存在。
这一模式及其时空动态能够在预兆失效规律的早期阶段被检测到,这对于滑坡早期预警系统具有潜在的广泛应用,能够在崩塌发生之前,提前识别工程和自然斜坡的风险(Tordesillas等,2021,2018;Zhou等,2022)。然而,识别和跟踪运动聚类需要多个监测点。如果监测区域内的数据系列有限,可能很难从持续监测数据中辨别出这一模式及其动态,除非可以从数据中找到并利用编码此模式的相关特征。在LRSD模型中,时间上的持续性(PiT)和超过阈值的监测点数量(NP)就是这样的特征。正如之前所示,将这些特征纳入LRSD可以捕捉PFR中表现出的动力学特征,从而减少误报的数量。
6.2 LRSD与现有警报系统的比较
目前,在考虑的滑坡区域已经有现有的警报系统。在Pomarico滑坡中,系统设有三个速度阈值(分别为100、200和300 mm/天),对应三个不同的警报级别:关注、预警和警报(Centro Protezione Civile Università degli Studi di Firenze,2021)。在测试年中,只有一个关注警报被触发,没有预警或警报发出。有趣的是,监测点33是唯一一个超过阈值的点,而这一点恰好是在LRSD提出的第一个警报时刻超过的。与现有系统相比,LRSD生成的警报更多,这表明LRSD的灵敏度比现有系统更高。
Sant’Andrea滑坡的系统则稍微复杂一些。该系统使用平均每日速度阈值、降雨阈值和前期降雨量来发出两个预警级别和一个警报级别(Department of Geosciences,2018)。在测试年中,村民两次被疏散,LRSD系统及时发出警报。在第一次疏散事件中,警报在12月6日(星期日)提前一天发出,根据考虑的PiT和NP,存在几个小时的波动。在第二次疏散事件中,LRSD系统在星期一早上8点开始发出警报,直到下午1点(考虑到5小时的时间持续性)。
在Veslemannen滑坡研究案例中,危险级别的速度阈值每年都会提高。尽管做了这些调整,但由于速度上升,在2018年和2019年发生了16次疏散(Kristensen等,2021)。在图10中,所提方法显著减少了警报的数量。当PiT和NP都设置为5时,警报在破裂发生前不久发出,且测试集中没有错误警报。然而,在这种情况下,警报是在晚上8点发出的,距离破裂仅1小时。然而,正如之前所讨论的,较短的PiT可以使警报提前更多时间发出。
我们的工作与Bernardie等人在2015年提出的方法在概念上类似,其中假定一组特定模型可以完美地拟合正常的滑坡规律,并通过统计方法基于RMSE建立阈值。然而,我们的方法与他们的研究有所不同,我们不仅考虑了模型阶段的时空关系,还展示了其在各种研究案例中的适应性,展现了良好的迁移性。特别地,我们超越了仅考虑RMSE的方式,采用了原始历史残差,这使得我们能够区分正偏差和负偏差。这一细化方法增强了我们分析的精准度和深度。
然而,与Bernardie等的发现一致,我们的方法也需要大量的时间序列数据,包括位移和气象参数。为了进行准确的预测,特别是在早期预警应用中,必须持续不断地更新数据,并尽力减少不确定性。
6.3 所提警报框架的操作性
所提出的警报系统的设计严格考虑了其在实际案例中的应用:回顾图形摘要。对于操作性警报系统的首要要求之一,确实是警报发送的速度。如前所述,ECC-VAR可以在不到一秒的时间内训练并生成所有监测点的预测,具体时间取决于所涉及的变量数量。进一步地,预测框架可以根据研究案例的特定特征进行调整。优化模型参数并定义残差阈值、PiT(时间持续性)和NP(超阈值点数)后,潜在的警报可以在几秒钟内发送(同样,时间可能会有所变化,取决于建模中涉及的变量数量)。
可靠警报系统的其他基本要求是适应性和可迁移性。根据具体案例,所提框架的多个特征可以进行修改和适配。例如,任何可能影响滑坡位移的触发因素,如地震活动、温度变化或水库水位变化(如果滑坡位于人工水库环境中),都可以被纳入模型。此外,只要监测系统能够以恒定的时间频率测量滑坡位移,该方法也可以应用于不同的监测系统。在本研究中,我们展示了GB-SAR和RTS的数据结果。可以使用更高(或更低)频率的时间序列数据,因为训练和预测窗口也可以进行适配。此外,PiT可以根据滑坡案例的具体需求进行调整。如果假阳性和假警报的平衡偏向较少警报,可以使用较小的PiT值,反之亦然。扩展PiT窗口会减少警报的数量,但会增加异常加速开始和警报触发之间的延迟。同样,NP也可以根据具体问题进行适配。如果少数监测点的位移体积较大且危险,则可以使用较少的NP,反之亦然。还可以单独选择与不同预定义运动区域相关的监测点组合。不同的警报级别也可以通过考虑每个警报的监测点数量来应用,并赋予不同的警报等级。
当然,尽管将滑坡的地质和岩土特性直接纳入模型可能会遇到一些挑战,但一个可行的解决方案是后处理。这使我们能够设计一个系统,间接地集成特定的滑坡特征,如预定义的运动区域。每种方法都存在其局限性,本方法也不例外。当校准集包含极端残差值时,CDF会发生剧烈变化。因此,残差阈值可能设置得过高,导致随后的警报数量非常少。另一个关键因素是对模型预测准确度的依赖,当然,还包括测量数据的质量。数据质量的变化(如噪声或缺失数据)引入的不确定性可能会影响LRSD的准确性。此外,所提方法的准确性与监测点数量和时间间隔之间的关系,因每个滑坡案例的具体特征而有所不同。值得注意的是,增加监测点数量和缩短时间间隔无疑能提高方法的准确性和可靠性,因为噪声效应可以进一步减少,系统的冗余性也能进一步增强。在处理噪声数据以最小化错误警报时,精细调整PiT参数显得尤为重要。然而,如前所述,确定理想的PiT设置是一个因案例而异的过程,需要对每个场景进行彻底评估。一般来说,噪声数据需要更高的PiT和NP值。然而,较高的PiT值会导致警报过程的延迟。因此,如果我们预期滑坡发生的前兆较短,这可能会阻碍及时的检测。
我们的论文集中在建模地表位移。然而,我们认为将此模型扩展到涵盖地下位移具有重要潜力。探索将地下和地表位移集成到统一模型中的方法也是非常有价值的。此外,我们预期,通过增加监测点来扩充数据集将进一步提高LRSD生成警报的质量。为了实现早期预警目的,我们使用了每小时的监测数据,假设数据流直接传输到计算站并且具有低延迟(在几分钟之内)。位移测量和降雨数据必须以相同的频率获取。在所有三个案例中,LRSD一致地在3秒内生成警报,展示了其及时发布早期预警的潜力。因此,该系统可以基于高频、同步的数据输入提供快速警报。
此外,LRSD确实可以扩展到GNSS和卫星InSAR地面运动数据。然而,这些监测系统的数据频率和时间分辨率可能有所不同。例如,Sentinel-1的InSAR数据当前的重访时间大约为12天,而且处理时间并不是以分钟为单位。因此,在某些情况下,我们可能无法及时收到观测数据,无法有效检测到滑坡行为的变化。
另一个需要考虑的方面是信息的空间分辨率。卫星InSAR数据的空间分辨率会因处理技术和所用数据而有所不同,但通常提供的空间密度低于地面InSAR(GB-InSAR)或机器人全站仪(RTS)系统。这种较低的空间密度可能会减少方法检测较小滑坡的精度,因为在滑坡区域内有多个监测点可以提高方法的准确性。在将该方法扩展到这些监测系统时,需要对数据特征的差异进行调整和校准。
最后,预测模型可以通过编码各种外部触发因素与滑坡之间的相互作用来进行校准,只要这些触发因素能够影响滑坡位移。这意味着像地面震动这样的因素也可以被纳入位移预测模型中。
7. 结论
我们提出了一种强大且适应性强的局部滑坡警报生成方法。该方法结合了先进的预测模型,为缓慢滑动的滑坡体内的状态变化提供了深入见解。基于材料科学和复杂系统动力学,LRSD考虑了多个位移时间序列,以编码群体动力学,这对于识别滑坡失败前的迹象至关重要。
LRSD旨在通过检测与历史动态的偏离来改善传统警报系统,并以异常加速作为警报的关键信号。它对不同滑坡环境的适应性、快速操作能力以及在调整关键参数上的灵活性,提高了其在各种地质环境中实时应用的潜力。
LRSD旨在与现有的警报系统(如速度阈值)一起使用。其理念是通过速度阈值维持较高的警报频率,以确保一般安全,而LRSD旨在减少整体警报频率。
相反,LRSD专门在系统经历状态变化的关键情况下,提供更多关注。LRSD可以告知您某一部分或整个系统是否在其动态中发生变化,指示状态转变,尽管这不一定意味着即将发生滑坡失败。然而,这些额外的信息对于识别系统中的变化至关重要,这些变化可能最终导致滑坡失败。
我们的结果强烈表明,将LRSD纳入现有的滑坡早期预警系统将大大提高其效果。
附录


















 500
500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









