









实现平台:windows下的Android studio1.4
依赖库:openCV3.1.0
程序安装平台:Android6.0
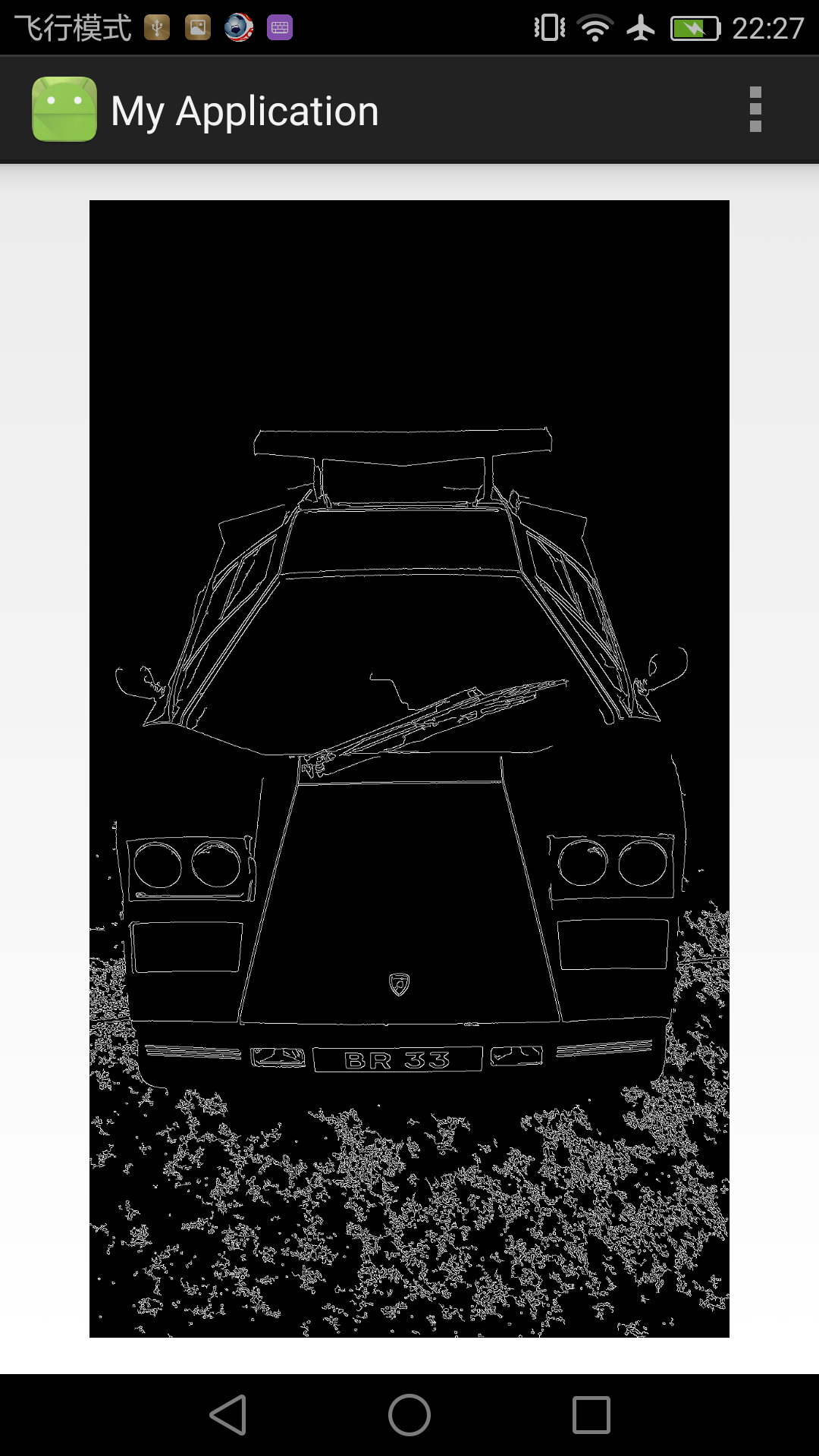
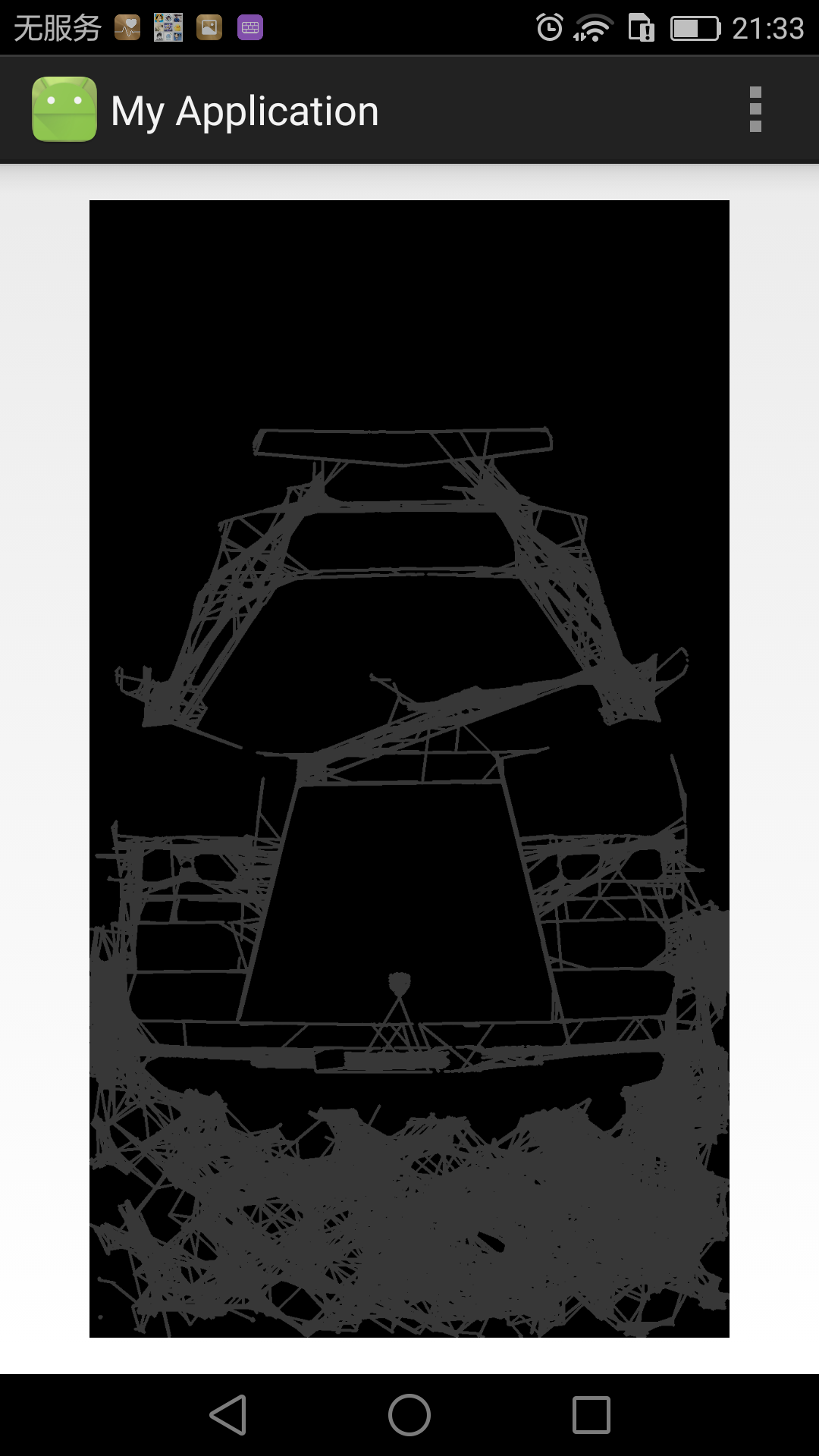
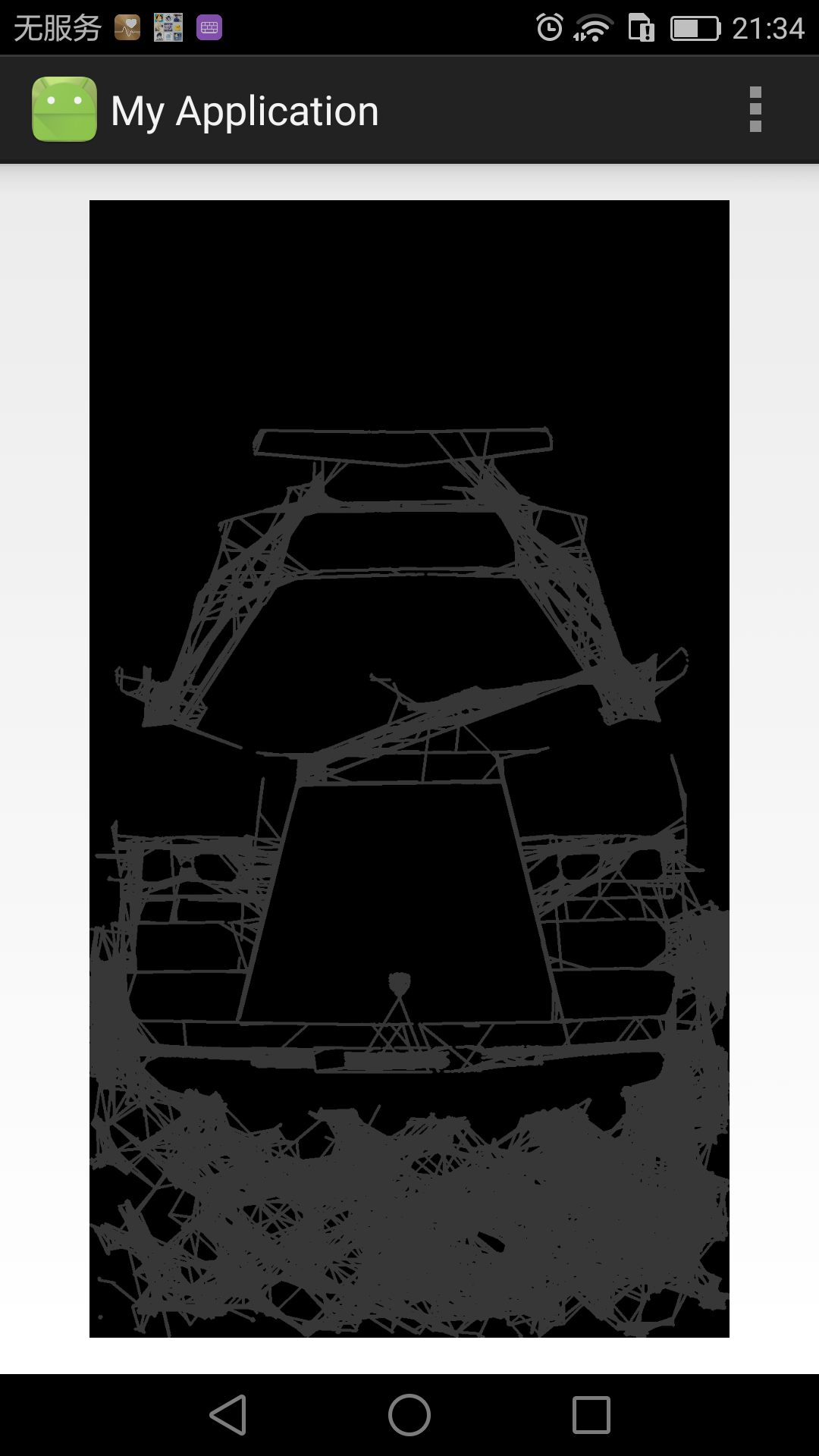
实现的功能:从手机中选择一张图片,检测图片的基本特征,通过menu菜单选择要检测的特征,包括Canny边缘检测、Harris角点检测、霍夫直线检测
说明:对于检测图像的基本特征的算法就不加以详细说明了,网上的资料很多,现在这里主要介绍算法以及代码的编写
1.在Androidmanifest.xml文件中添加如下代码:
<?xml version="1.0" encoding="utf-8"?> <manifest xmlns:android="http://schemas.android.com/apk/res/android" package="com.example.wangshuailpp.myapplication" > <uses-permission android:name="android.permission.READ_EXTERNAL_STORAGE"/> <application android:allowBackup="true" android:icon="@mipmap/ic_launcher" android:label="@string/app_name" android:supportsRtl="true" android:theme="@style/AppTheme" > <activity android:name=".MainActivity" android:label="@string/app_name" > <intent-filter> <action android:name="android.intent.action.MAIN" /> <category android:name="android.intent.category.LAUNCHER" /> </intent-filter> </activity> </application> </manifest>
这里最重要的是,表示要开启手机内存的读取权限:
<uses-permission android:name="android.permission.READ_EXTERNAL_STORAGE"/>
2.在布局文件中activity_main.xml文件中添加一个图片控件:
<?xml version="1.0" encoding="utf-8"?> <RelativeLayout xmlns:android="http://schemas.android.com/apk/res/android" xmlns:tools="http://schemas.android.com/tools" android:layout_width="match_parent" android:layout_height="match_parent" android:paddingLeft="@dimen/activity_horizontal_margin" android:paddingRight="@dimen/activity_horizontal_margin" android:paddingTop="@dimen/activity_vertical_margin" android:paddingBottom="@dimen/activity_vertical_margin" tools:context=".MainActivity"> <ImageView android:id="@+id/Picture" android:layout_height="fill_parent" android:layout_width="fill_parent" android:visibility="visible" /> </RelativeLayout>
3.菜单menu_main.xml文件中添加成员:
<menu xmlns:android="http://schemas.android.com/apk/res/android" xmlns:app="http://schemas.android.com/apk/res-auto" xmlns:tools="http://schemas.android.com/tools" tools:context=".MainActivity"> <item android:id="@+id/Canny" android:title="Canny" android:showAsAction="never" /> <item android:id="@+id/Harris" android:title="Harris" android:showAsAction="never" /> <item android:id="@+id/Hough" android:title="Hough" android:showAsAction="never" /> </menu>
4.在MainActivity.java主类中的代码:
package com.example.wangshuailpp.myapplication; /* 功能介绍:深入OpenCV Android应用开发第二章代码,检测图像的基本特征 包括了Canny边缘检测法Sobel边缘检测法等 实现步骤:1.从手机中取出一张图片作为原始图片,通过点击menu对应的按钮开始选择图片 2.通过menu按钮选择要对照片进行的图像处理 */ import android.content.Intent; import android.graphics.Bitmap; import android.graphics.BitmapFactory; import android.net.Uri; import android.os.Bundle; import android.support.v7.app.ActionBarActivity; import android.util.Log; import android.view.Menu; import android.view.MenuItem; import android.widget.ImageView; import android.widget.Toast; import org.opencv.android.BaseLoaderCallback; import org.opencv.android.LoaderCallbackInterface; import org.opencv.android.OpenCVLoader; import org.opencv.android.Utils; import org.opencv.core.Core; import org.opencv.core.CvType; import org.opencv.core.Mat; import org.opencv.core.Point; import org.opencv.core.Scalar; import org.opencv.imgproc.Imgproc; import java.io.FileNotFoundException; import java.io.InputStream; import java.util.Random; public class MainActivity extends ActionBarActivity { private final static int CANNY = 0; private final static int HARRIS = 1; private final static int HOUGH = 2; private final static String TAG = "infor"; private Mat src = null;//定义一个Mat型类用于临时存放选择的图片 private Mat image = null;//用于存放得到的图片 private Mat des = null;//用于临时存放Mat型类的图片 private Bitmap resultBitmap; private ImageView pictureView = null;//定义一个ImageView类视图用于存放选择的图片 private BaseLoaderCallback mOpenCVCallBack = new BaseLoaderCallback(this) { @Override public void onManagerConnected(int status) { switch (status){ case LoaderCallbackInterface.SUCCESS: /*在这里执行自己的语句*/ break; default: super.onManagerConnected(status); break; } } }; @Override protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); pictureView = (ImageView)findViewById(R.id.Picture); } /*启动openCV*/ @Override protected void onResume() { super.onResume(); OpenCVLoader.initAsync(OpenCVLoader.OPENCV_VERSION_3_1_0, this, mOpenCVCallBack); } @Override public boolean onCreateOptionsMenu(Menu menu) { // Inflate the menu; this adds items to the action bar if it is present. getMenuInflater().inflate(R.menu.menu_main, menu); return true; } /*在这里选取要进行的操作*/ @Override public boolean onOptionsItemSelected(MenuItem item) { // Handle action bar item clicks here. The action bar will // automatically handle clicks on the Home/Up button, so long // as you specify a parent activity in AndroidManifest.xml. int id = item.getItemId(); //对应Canny边缘检测的按钮 if (id == R.id.Canny) { /*下面对通过Intent对象得到选择图片的Activity,最后返回图片的信息,得到图片*/ Intent pictureSelectIntent = new Intent(Intent.ACTION_PICK);//设置Action pictureSelectIntent.setType("image/");//设置数据的类型 startActivityForResult(pictureSelectIntent,CANNY); return true; } //对应Harris边缘检测的按钮 if (R.id.Harris == id){ Intent pictureSelectIntent = new Intent(Intent.ACTION_PICK); pictureSelectIntent.setType("image/"); startActivityForResult(pictureSelectIntent,HARRIS); return true; } //对应Hough的直线检测按钮 if(R.id.Hough == id){ Intent pictureSelectIntent = new Intent(Intent.ACTION_PICK); pictureSelectIntent.setType("image/"); startActivityForResult(pictureSelectIntent,HOUGH); return true; } return super.onOptionsItemSelected(item); } /*调用StartActivityForResult后的回调函数 * 在这个函数里面得到图片然后进行相应的处理 * */ @Override protected void onActivityResult(int requestCode, int resultCode, Intent data) { super.onActivityResult(requestCode, resultCode, data); if(RESULT_OK == resultCode){ switch(requestCode){ case CANNY: try { Log.i(TAG,"onActivityResult00000000000"); image = GetPicture(data); Toast.makeText(MainActivity.this, "图片选取成功", Toast.LENGTH_SHORT).show(); Log.i(TAG,"onActivityResult11111111111"); resultBitmap = MyCanny(image); Log.i(TAG,"onActivityResult22222222222222"); pictureView.setImageBitmap(resultBitmap); } catch (FileNotFoundException e) { e.printStackTrace(); } break; case HARRIS: try { image = GetPicture(data);//得到图片 Toast.makeText(MainActivity.this, "图片选取成功", Toast.LENGTH_SHORT).show(); Log.i(TAG,"onActivityResult11111111111"); resultBitmap = MyHarris(image);//角点检测的图像处理 Log.i(TAG,"onActivityResult22222222222222"); pictureView.setImageBitmap(resultBitmap); } catch (FileNotFoundException e) { e.printStackTrace(); } case HOUGH: try { image = GetPicture(data);//得到图片 Toast.makeText(MainActivity.this, "图片选取成功", Toast.LENGTH_SHORT).show(); Log.i(TAG,"onActivityResult11111111111"); resultBitmap = MyHoughLine(image); pictureView.setImageBitmap(resultBitmap); }catch (FileNotFoundException e) { e.printStackTrace(); } } } } /*得到图片*/ public Mat GetPicture(Intent data) throws FileNotFoundException { /*下面的代码是获得手机内的图片*/ final Uri imageUri = data.getData();//得到图片的路径 final InputStream imageStream = getContentResolver().openInputStream(imageUri);//得到基于路径的流文件 final Bitmap selectImage = BitmapFactory.decodeStream(imageStream);//得到了图片的位图 /*下面将位图转换成Mat型,可以进行图片的处理*/ src = new Mat(selectImage.getHeight(),selectImage.getWidth(), CvType.CV_8UC4); Utils.bitmapToMat(selectImage,src); return src; } /*下面进行图片的处理 * * */ /*Canny边缘处理*/ public Bitmap MyCanny(Mat src){ Bitmap result; Mat grayMat = new Mat(); Mat cannyEdges = new Mat(); Log.i(TAG,"MyCanny0000000000"); /*将图片转换成灰度图*/ Imgproc.cvtColor(src, grayMat, Imgproc.COLOR_BGR2GRAY); Log.i(TAG, "MyCanny1111111111111111"); /*得到边缘图,这里最后两个参数控制着选择边缘的阀值上限和下限*/ Imgproc.Canny(grayMat,cannyEdges,50,300); Log.i(TAG, "MyCanny222222222222222222222222"); /*将Mat图转换成位图*/ result = Bitmap.createBitmap(src.cols(),src.rows(),Bitmap.Config.ARGB_8888); Utils.matToBitmap(cannyEdges,result); Log.i(TAG, "MyCanny3333333333333333333333"); return result; } /*Harris角点检测*/ public Bitmap MyHarris(Mat src){ Bitmap resultHarris; Mat grayMat = new Mat(); Mat corners = new Mat(); Log.i(TAG,"MyHarris00000000000000000000"); /*将图片转换成灰度图*/ Imgproc.cvtColor(src,grayMat,Imgproc.COLOR_BGR2GRAY); Log.i(TAG, "MyHarris1111111111111111111"); /*找出角点*/ Mat tempDst = new Mat(); Imgproc.cornerHarris(grayMat,tempDst,2,3,0.04); Log.i(TAG, "MyHarris2222222222222222222"); /*归一化Harris角点的输出*/ Mat tempDstNorm = new Mat(); Core.normalize(tempDst,tempDstNorm,0,255,Core.NORM_MINMAX); Core.convertScaleAbs(tempDstNorm, corners); Log.i(TAG, "MyHarris33333333333333333333"); /*在新的图片上绘制角点*/ Random r = new Random(); for(int i = 0; i < tempDstNorm.cols(); i++){ for (int j = 0;j <tempDstNorm.rows(); j++){ double[] value = tempDstNorm.get(j,i); if(value[0] > 250){//决定了画出哪些角点,值越大选择画出的点就越少。如果程序跑的比较慢,就是由于值选取的太小,导致画的点过多 Imgproc.circle(corners, new Point(i,j),5,new Scalar(r.nextInt(255)),2); } } } Log.i(TAG,"MyHarris4444444444444444444444444"); /*将Mat图转换成位图*/ resultHarris = Bitmap.createBitmap(src.cols(),src.rows(),Bitmap.Config.ARGB_8888);//这一步至关重要,必须初始化Bitmap对象的大小 Utils.matToBitmap(corners, resultHarris); return resultHarris; } /*Hough直线检测*/ public Bitmap MyHoughLine(Mat src){ Bitmap resultHough; Mat grayMat = new Mat(); Mat cannyEdges = new Mat(); Mat lines = new Mat(); Mat origination = new Mat(src.size(),CvType.CV_8UC1); src.copyTo(origination);//拷贝 /*通过Canny得到边缘图*/ Imgproc.cvtColor(origination,grayMat,Imgproc.COLOR_BGR2GRAY); Imgproc.Canny(grayMat,cannyEdges,50,300); //Mat cannyEdges = new Mat(resultHough.getHeight(),resultHough.getWidth(),CvType.CV_8UC1); Log.i(TAG,"MyHoughLine00000000000000"); /*获得直线图*/ Imgproc.HoughLinesP(cannyEdges,lines,1,Math.PI/180,10,0,50); Log.i(TAG, "MyHoughLine111111111111111"); Mat houghLines = new Mat(); houghLines.create(cannyEdges.rows(),cannyEdges.cols(),CvType.CV_8UC1); Log.i(TAG, "MyHoughLine2222222222222222222"); /*在图线的上绘制直线*/ for(int i = 0;i < lines.rows();i++){ double[] points = lines.get(i,0); if(null != points){ double x1,y1,x2,y2; x1 = points[0]; y1 = points[1]; x2 = points[2]; y2 = points[3]; Point pt1 = new Point(x1,y1); Point pt2 = new Point(x2,y2); /*在一幅图像上绘制直线*/ Imgproc.line(houghLines,pt1,pt2,new Scalar(55,100,195),3); } } Log.i(TAG, "MyHoughLine3333333333333333333333333"); resultHough = Bitmap.createBitmap(src.cols(),src.rows(),Bitmap.Config.ARGB_8888); Utils.matToBitmap(houghLines,resultHough); Log.i(TAG, "MyHoughLine44444444444444444444444444444"); return resultHough; } }这里需要注意的事项:
1.在霍夫直线检测中有一句代码,很多网上的程序都不对,都写成了
double[] points = lines.get(0,i);其实是
double[] points = lines.get(i,0);写成第一种,会导致只会画出一条直线。
其他的都可以在程序的解释中看到,在这里就不都说了,下面直接贴结果,分别是原图,Canny,Harri,霍夫直线。
















 3861
3861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









