






红外循迹小车简单实现
这是第一次写博客来记录第一次成功的简单小项目,希望在记录自己学习过程时也能帮助到和我一样正在入坑的小白。
硬件篇
首先,我们要实现一个小车能够在我们的控制下前进、转向、后退等等,我们需要一块主控板(我使用的是一块自己画的板子,具体见下)。然后我们需要小车能够动起来,但是由于单片机提供不了那么高的输出电压来带动我们的电机,所以我们还需要一块驱动板(这里我使用的是网上购买的L298N,具体介绍见下),另外就是用来循迹的红外模块。
1.主板部分
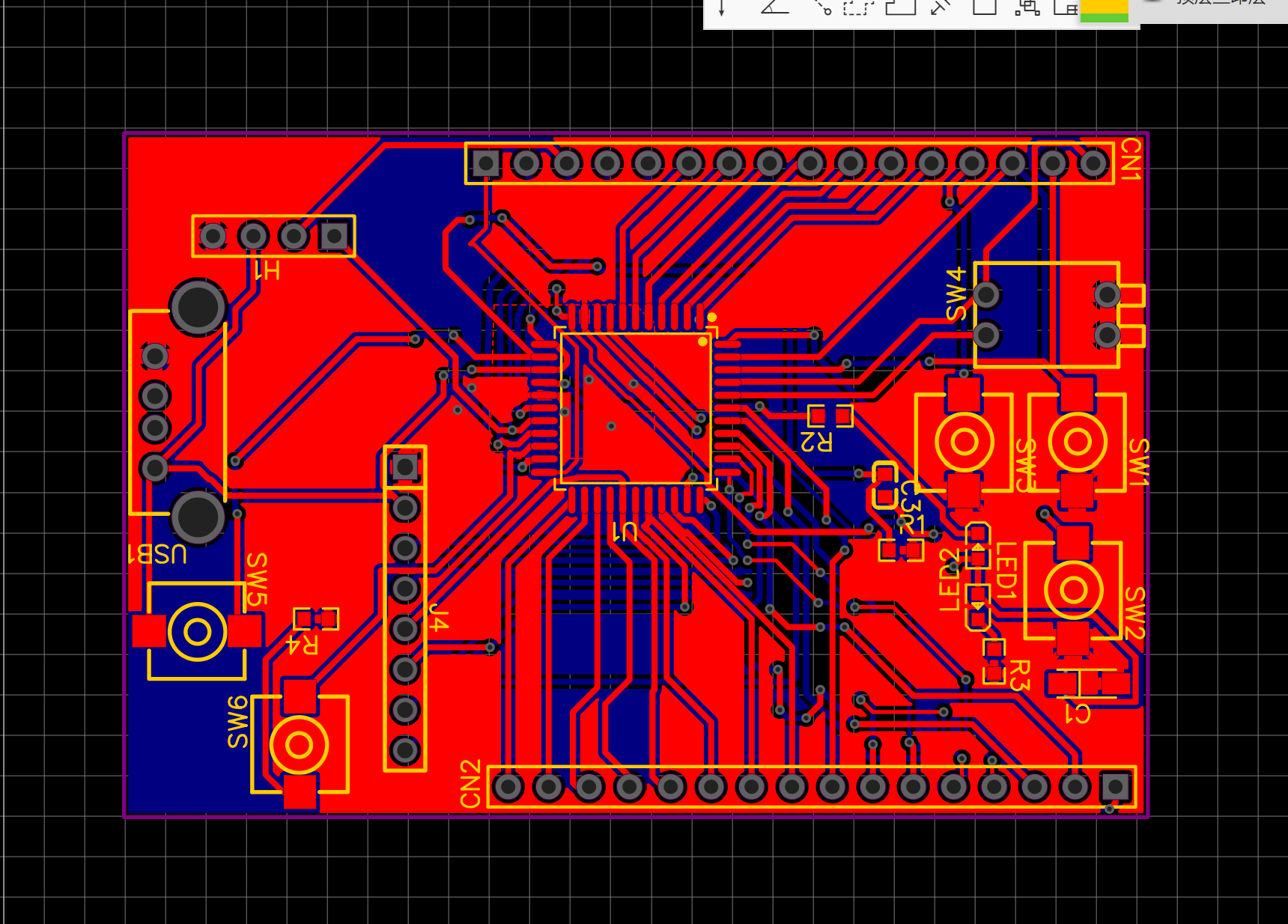
这块主控板是自己用EDA画的,然后打板,焊元件。前前后后也花了不少时间,来来回回也失败过很多次,不过最后结果是好的,也让我从一个小白成长成有一点点焊板子经验的小白了。有需要可以私信我。
2.驱动板 L298N
驱动板其实自己也画了一个,结果最后买元件的时候只关注了封装却没在意型号,四个芯片全买错了(也算是积累经验了吧),之后也就没心思再去焊了,就在网上买了一个现成的驱动,如果有和我使用一样的驱动板的可以参考。
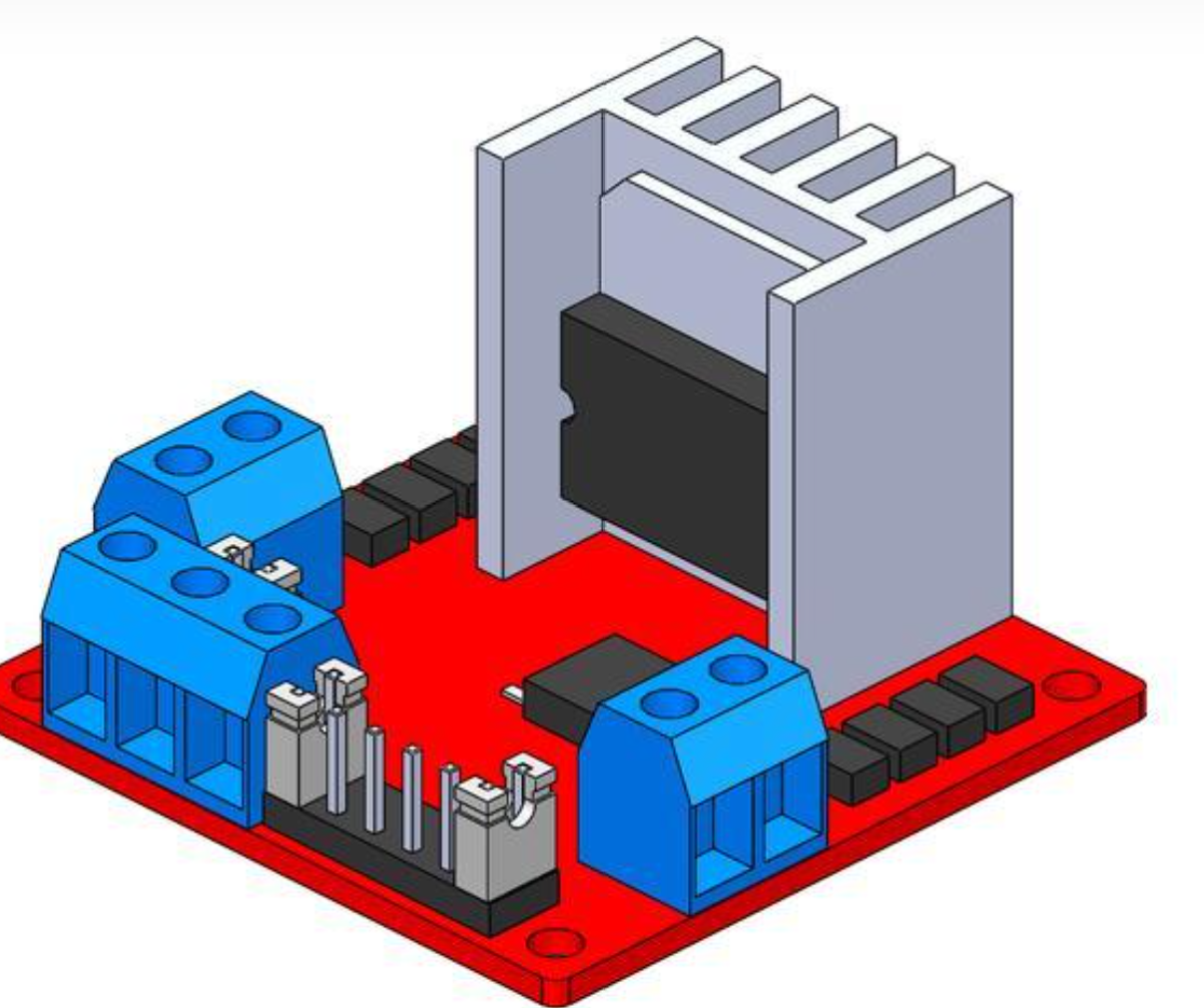
驱动大概长这样,它的具体使用方法csdn里面应该有很多介绍,我当时也是在这里找资料的,如果有啥找不到的可以私信我(不过我大概也不会)。
3.红外循迹模块
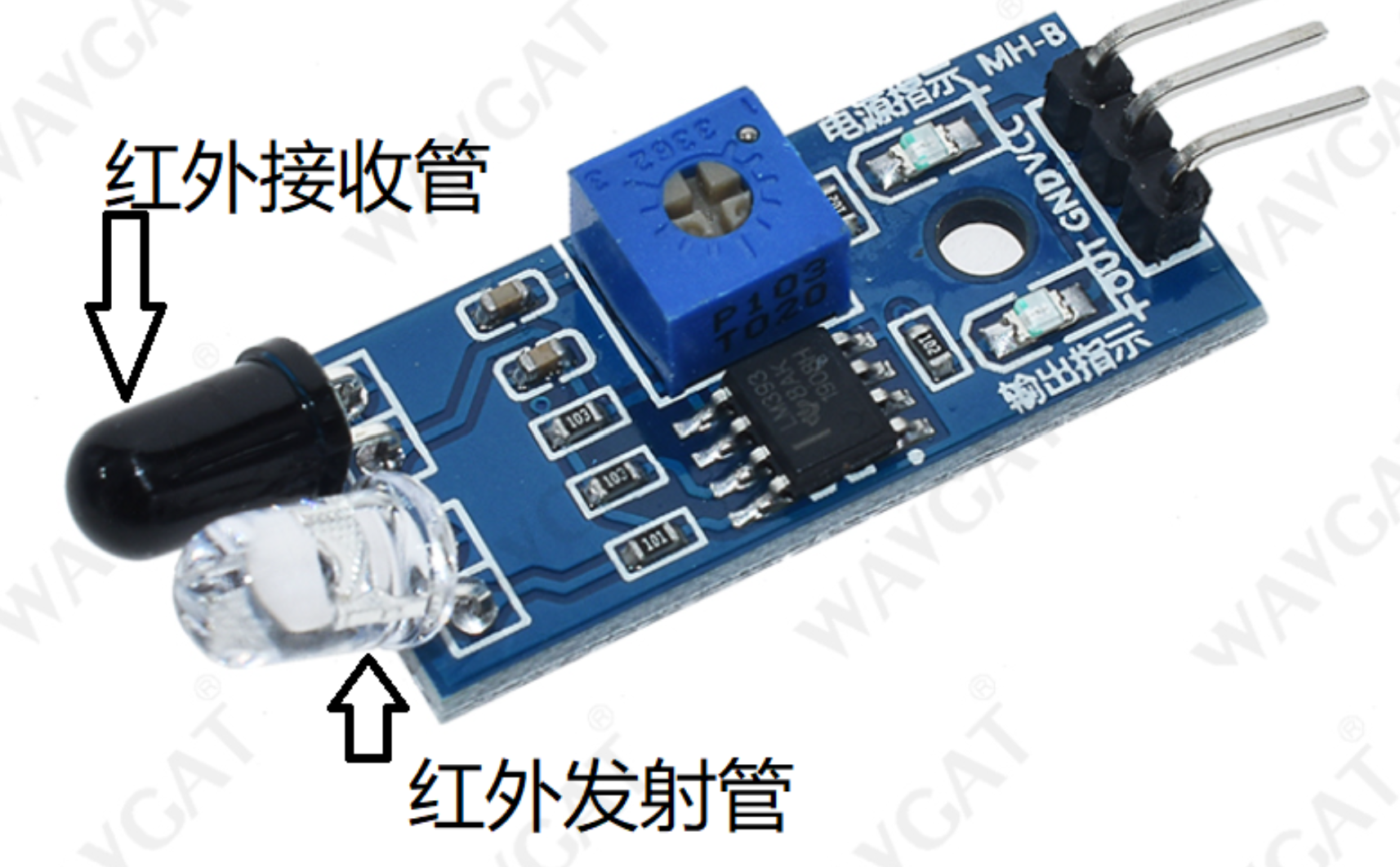
大概长这个鬼样子,白色发射红外,黑色接收反射回来的红外,由于我们的赛道的布置使用的是黑色电工胶布,而红外遇到黑色会被吸收掉,也就不会反射回去,导致白色接收不到,所以我们以此来进行沿黑色胶布来进行循迹。
使用的时候我们需要调整它的灵敏度(这是一项细活),将灯管放在黑色胶布上,接下来旋转滑动变阻器,直到刚好模块上的LED灯熄灭,然后再将灯管移到没贴黑胶布处,如果LED灯亮起来了,说明调整的正好,否则需要反方向旋转滑动变阻器使LED亮起。以此往复,使得恰好可以判断是否遇到了黑色胶布。
软件篇过几天更新吧。。。。。。。















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









