







 该博客详细介绍了使用Kinect2.0采集RGB-D数据,包括驱动安装和数据采集,并重点讲解了如何在MATLAB中使用Camera Calibration Toolbox进行相机标定。提供了棋盘格文件的下载链接,以及工具箱的下载和安装步骤,后续将补充具体的操作步骤和过程代码。
该博客详细介绍了使用Kinect2.0采集RGB-D数据,包括驱动安装和数据采集,并重点讲解了如何在MATLAB中使用Camera Calibration Toolbox进行相机标定。提供了棋盘格文件的下载链接,以及工具箱的下载和安装步骤,后续将补充具体的操作步骤和过程代码。
【未完,占坑后补,过程代码已附,可参考】
张正友棋盘法定标--Matlab【Camera Calibration Toolbox】
一、Kinect2.0采集RGB-D数据
1.1 安装驱动及数据采集
详见上文《Kinect2.0采集RGB-D数据》
1.2 棋盘格子文件
三种,chess5x7x0.03、chess7x9x0.025、chess9x11x0.02,按需选择打印出来就可以了。提供两种下载方式哈~
1.2.1 云盘:https://pan.baidu.com/s/158qM2XZhD7E5rSUbC_leDA
提取码:qpgz
1.2.2 CSDN【设置了0积分下载】chess5x7x0.03、chess7x9x0.025、chess9x11x0.02

1.3 数据
【截图待补】
二、Camera Calibration Toolbox下载安装
2.1 Camera Calibration Toolbox下载
2.2 Camera Calibration Toolbox路径
将解压后得到的toolbox_calib文件夹放在你的MATLAB工具箱toolbox下,例如我的路径是F:\Download\R2019a\toolbox\toolbox_calib
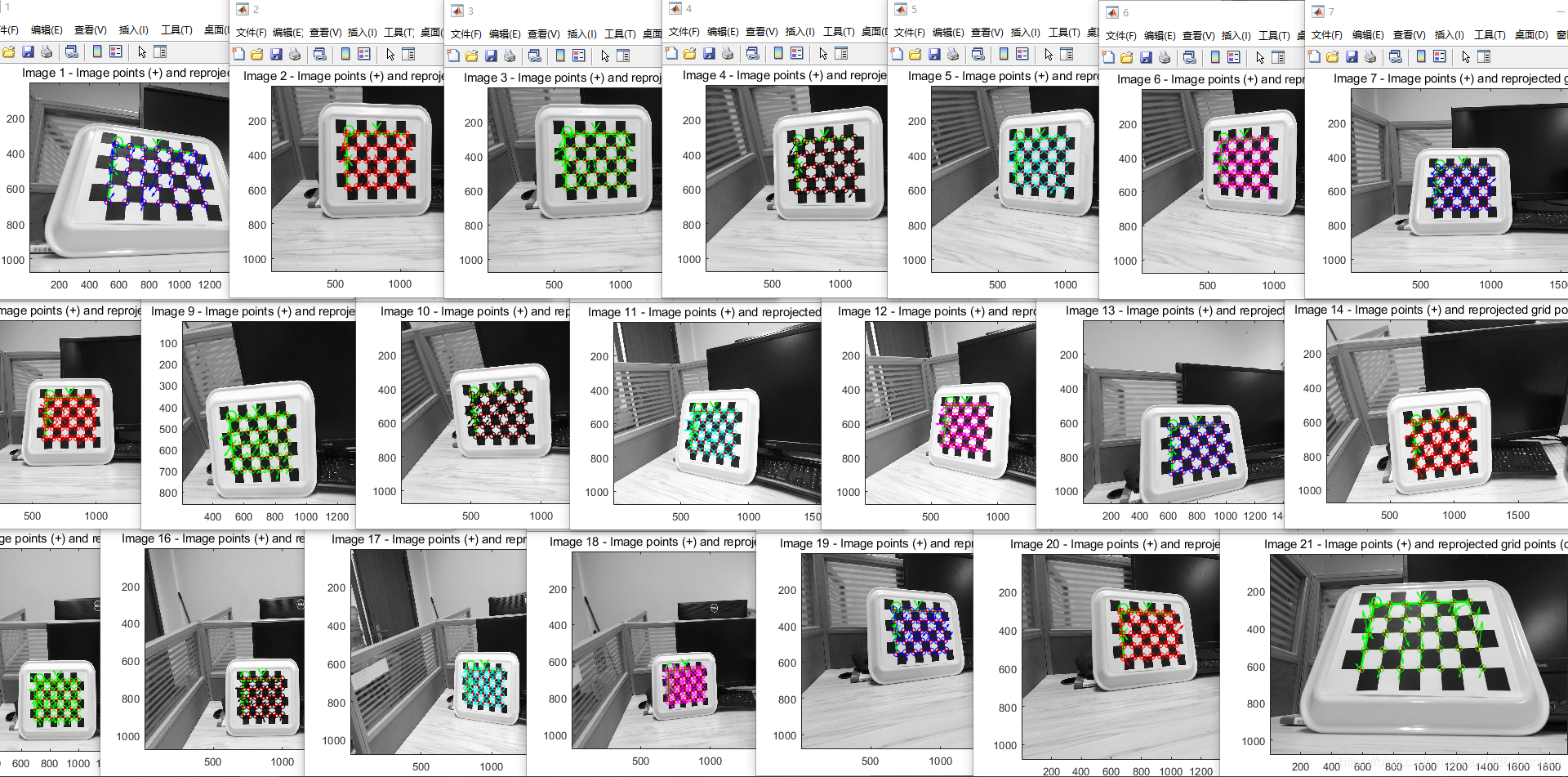
三、MATLAB中操作步骤
【待补充,可见 3.n过程代码】
3.1
3.2

3.3
3.n-x
3.n 过程代码
>>calib_gui
. color10.jpg color13.jpg color16.jpg color19.jpg color21.jpg color5.jpg color8.jpg
.. color11.jpg color14.jpg color17.jpg color2.jpg color3.jpg color6.jpg color9.jpg
color1.jpg color12.jpg color15.jpg color18.jpg color20.jpg color4.jpg color7.jpg
Basename camera calibration images (without number nor suffix): color
Image format: ([]='r'='ras', 'b'='bmp', 't'='tif', 'p'='pgm', 'j'='jpg', 'm'='ppm') j
Loading image 1...2...3...4...5...6...7...8...9...10...11...12...13...14...15...16...17...18...19 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2836
2836

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









