







Modbus TCP通信协议是一项应用层报文传输协议,与Modbus RTU等其他物理层接口的协议在实现上有所不同。同时,Modbus TCP在实际应用中可能存在一些特殊情况或变体,因此具体的实现细节可能会有所不同。
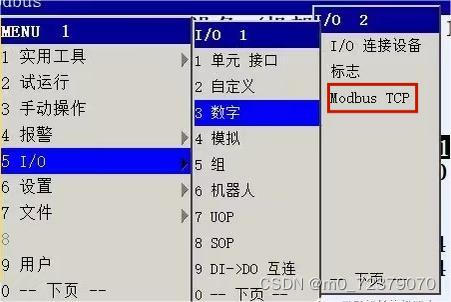
首先在IO里面找到modbus TCP并进去
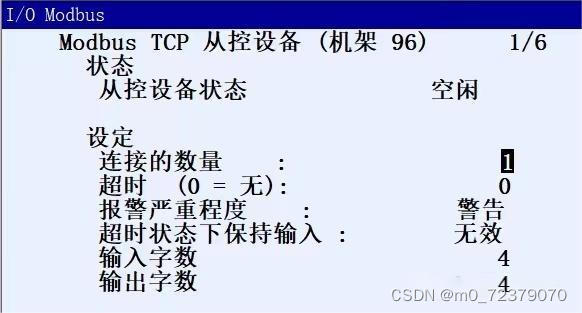
进去后可以看到modbus TCP的机架号及当前运行状态,可以设置设备连接,超时,报警后动作,超时状态下是否有效,输入/输出字数
如下图找到主机通讯并进入
Modbus TCP通信协议是一项应用层报文传输协议,与Modbus RTU等其他物理层接口的协议在实现上有所不同。同时,Modbus TCP在实际应用中可能存在一些特殊情况或变体,因此具体的实现细节可能会有所不同。
首先在IO里面找到modbus TCP并进去
进去后可以看到modbus TCP的机架号及当前运行状态,可以设置设备连接,超时,报警后动作,超时状态下是否有效,输入/输出字数
如下图找到主机通讯并进入
 1207
1102
7740
1207
1102
7740

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























