







 本文介绍了如何配置FANUC机器人与西门子1200进行Modbus TCP通讯。通过在IO中设置Modbus TCP,包括机架号、状态和端口,确保两者在同一网段下。在PLC侧,使用'MB_CLIENT'指令进行读写操作,注意高低位转换和防止通讯冲突。
本文介绍了如何配置FANUC机器人与西门子1200进行Modbus TCP通讯。通过在IO中设置Modbus TCP,包括机架号、状态和端口,确保两者在同一网段下。在PLC侧,使用'MB_CLIENT'指令进行读写操作,注意高低位转换和防止通讯冲突。
Modbus TCP是一种工业协议,它用于自动化设备之间的通信。Modbus TCP是在RTU协议前面添加MBAP报文头,由于TCP是基于可靠连接的服务,RTU协议中的CRC校验码就不再需要,所以在Modbus TCP协议中是没有CRC校验码。
Modbus是一种使用主从关系实现的请求-响应协议。在主从关系中,通信总是成对发生,一个设备必须发起请求,然后等待响应,并且发起设备(主设备)负责发起每次交互。通常,主设备是人机界面(HMI)或监控和数据采集(SCADA)系统,从设备是传感器、可编程逻辑控制器(PLC)或可编程自动化控制器(PAC)。
Modbus协议的最通用用途是为诸如PLC,I/O模块,以及连接其它简单域总线或I/O模块的网关服务的。Modbus TCP协议可以在使用TCP/IP协议的“Intranet”和“Internet”环境中传输MODBUS报文。
需要注意的是,Modbus TCP通信协议是一项应用层报文传输协议,与Modbus RTU等其他物理层接口的协议在实现上有所不同。同时,Modbus TCP在实际应用中可能存在一些特殊情况或变体,因此具体的实现细节可能会有所不同
//首先在IO里面找到modbus TCP并进去
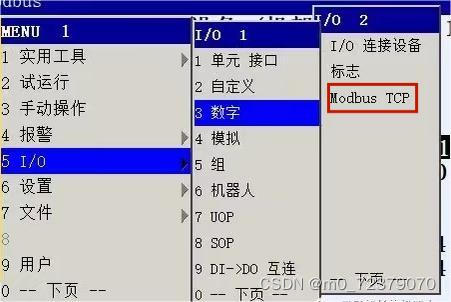
//进去后可以看到modbus TCP的机架号及当前运行状态,可以设置设备连接,超时,报警后动作,超时状态下是否有效,输入/输出字数
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6311
6311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









