







前言:
本篇博客是向大家介绍基于骁龙801开发的无人机的平台的各个性能参数以及其实现个功能。这个平台的可见物体就是一个类似主板的东西,尺寸仅为 58×40mm,可以内嵌在无人机内部。通过它主要实现了无人操作的自主飞行可以避免与周围物体的碰撞的灵活飞行,另外可以根据环境的光线强度实现光流定位飞行,最有新意的是将手机或者ipad连接无人机通过语音或者虚拟按键来操控并实现图像的实时传送。
一、无人机平台性能参数
1. 其采用了骁龙 801 2.26GHz 四核 Krait 架构处理器(这个同样在很多智能机芯片组上可以可拿到)和 Adreno 330 GPU、Hexagon DSP,集成了无人机所需的 GPS、无线连接、图形处理等功能。
2. 4K 视频:4K 高分辨率摄像头支持,图像增强和视频处理能力,可以实现第一人称视角 720p 实时视频编码。
3.先进的通信和导航:双频 2×2 802.11n Wi-Fi、蓝牙 4.0 和 5 Hz GNSS 定位能力、基于 Hexagon DSP 的实时操控系统
4.强大的摄像头和传感器支持:4K 立体 VGA、光流 摄像头、惯性测量单元 (IMU)、支持气压计传感器、附带多种传感器的接口
5.高通 Quick Charge 快速充电技术:支持在视频摄录/拍照之间的快速充电
另外,高通还提供了无人机软件和相关开发工具。这样一来,无人机厂家只要拿到这个平台,就可以动手直接设计无人机的外观,就如同现在的智能手机一样,快速实现产品的迭代,降低成本。

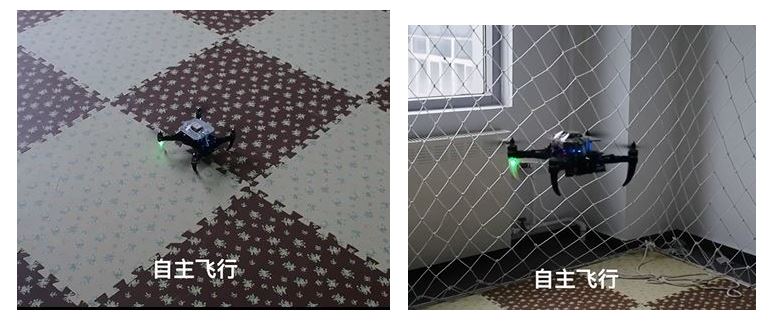
二、功能1---自主飞行
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
功能2---光流定位飞行
光流法基本原理是从二维图像序列中检测物体的运动、提取运动参数并且分析物体运动的相关规律是运动图像序列分析的主要研究内容。光流法是进行运动图像分析的重要方法,在视觉运动研究中具有举足轻重的作用。光流是测速算法,并不是直接定位的。简单理解,光流就是通过检测图像中光点和暗点的移动,来判断图像中像素点相对于飞行器的移动速度。如果地面是静止的,自然就可以得到飞行器相对于地面的移动速度啦。所谓光流定位,其实是利用光流测速再积分定位而已啦。而基于视觉采集的数据量较大,需要高速接口,目前的做法是 USB 3.0 或者 MIPI CSI-2。

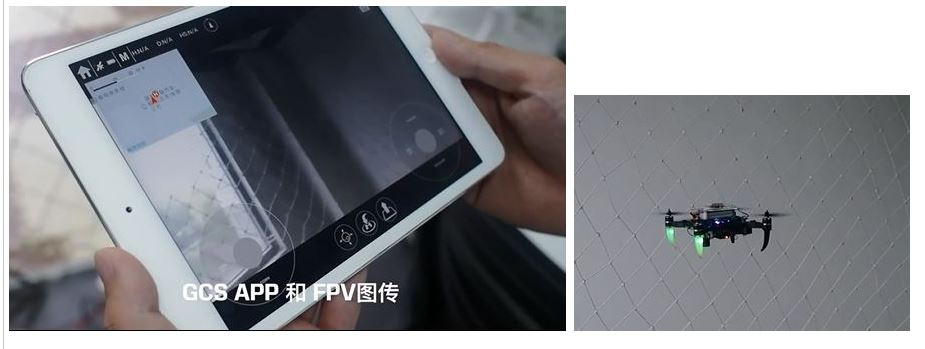
功能3---FPV和语音控制飞行
FPV系统是基于高通Snapdragon Flight平台的“核心板+操作系统+核心算法”一体化SoM(System on Module)无人机核心计算模块,包括了从硬件PCBA量身定制、结构整机散热优化、操作系统裁剪设计、外设sensor性能极致优化;到图像处理与传输性能调优、GPU模块高性能支持、无人机数据控制流等软件框架方案提供等;数据实传输等功能,FPV的设备组成:载机、天线、视频发射机、视频接收机、图像显示存储、遥控增程、摄像机组成。 对地需要可靠通信,2.4G、5.8GWifi, 还有手机网络是比较普遍接受的方式,不需要特别申请无线电频段。















 2653
2653

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









