






7月23日,斯坦福大学助理教授吴佳俊带来题为“Learning Physical Interactions for Scene Understanding”的第三场海华人工智能与前沿信息线上讲座,本场讲座由清华大学交叉信息院长聘副教授、海华研究院副院长黄隆波主持。
人类认知中的一项根本能力是理解物体的物理交互。这项能力对于我们搭建能在现实场景中观察和操作物体的智能系统来说也是至关重要的。
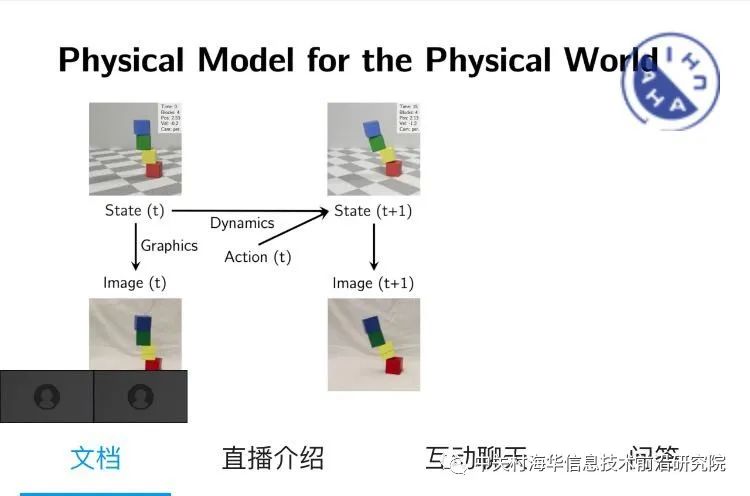
讲座中,吴佳俊首先介绍了一些计算认知模型,这些模型通过基于“直觉”的物理引擎来对人类的物理推断能力进行建模。

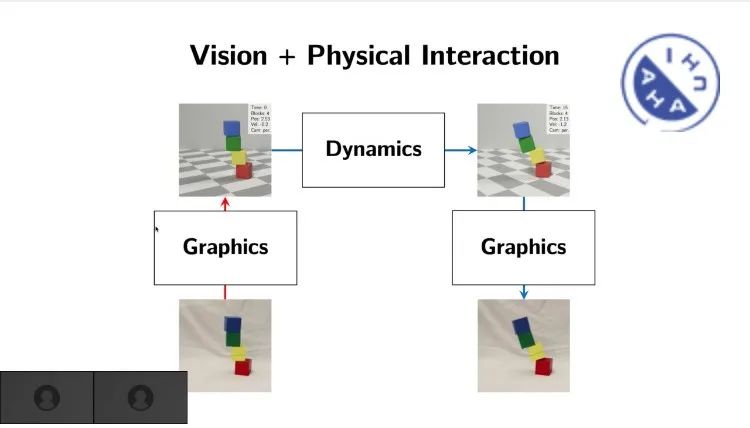
随后,吴佳俊进一步介绍最近的人工智能研究如何利用深度学习和图网络来构建一个学习系统以近似这样的“直觉”物理模拟。
这些系统有三点长处:
第一,它们可以近似包含刚体、流体在内的不同粒度下的物理交互;
第二,系统学习到的表示隐式地包含了物体的物理性质;
第三,这些基于学习的物理交互系统可以与显式的物理公式结合,并应用在机器人操作中。


最后,吴佳俊讨论了这些系统如何和视觉认知结合以用于物理场景理解,并一一解答观众们的提问。第三场海华研究院人工智能与前沿信息线上讲座精彩收官。
▼
嘉宾简介
吴佳俊是清华大学交叉信息院2014届姚班毕业生,现任斯坦福大学计算机系助理教授。他的研究方向包括计算机视觉,机器学习,和计算认知科学。在加入斯坦福之前,他曾在谷歌担任访问研究员。他本科毕业于清华大学交叉信息院,并在麻省理工学院获得电气工程与计算机科学方向的博士和硕士学位。他的工作曾荣获多项奖励,包括IROS认知机器人方向的最佳论文,以及脸书、英伟达、百度、三星和Adobe奖学金。
















 767
767











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









