






本篇文章将介绍二维的Graham扫描算法和它的源码实现。
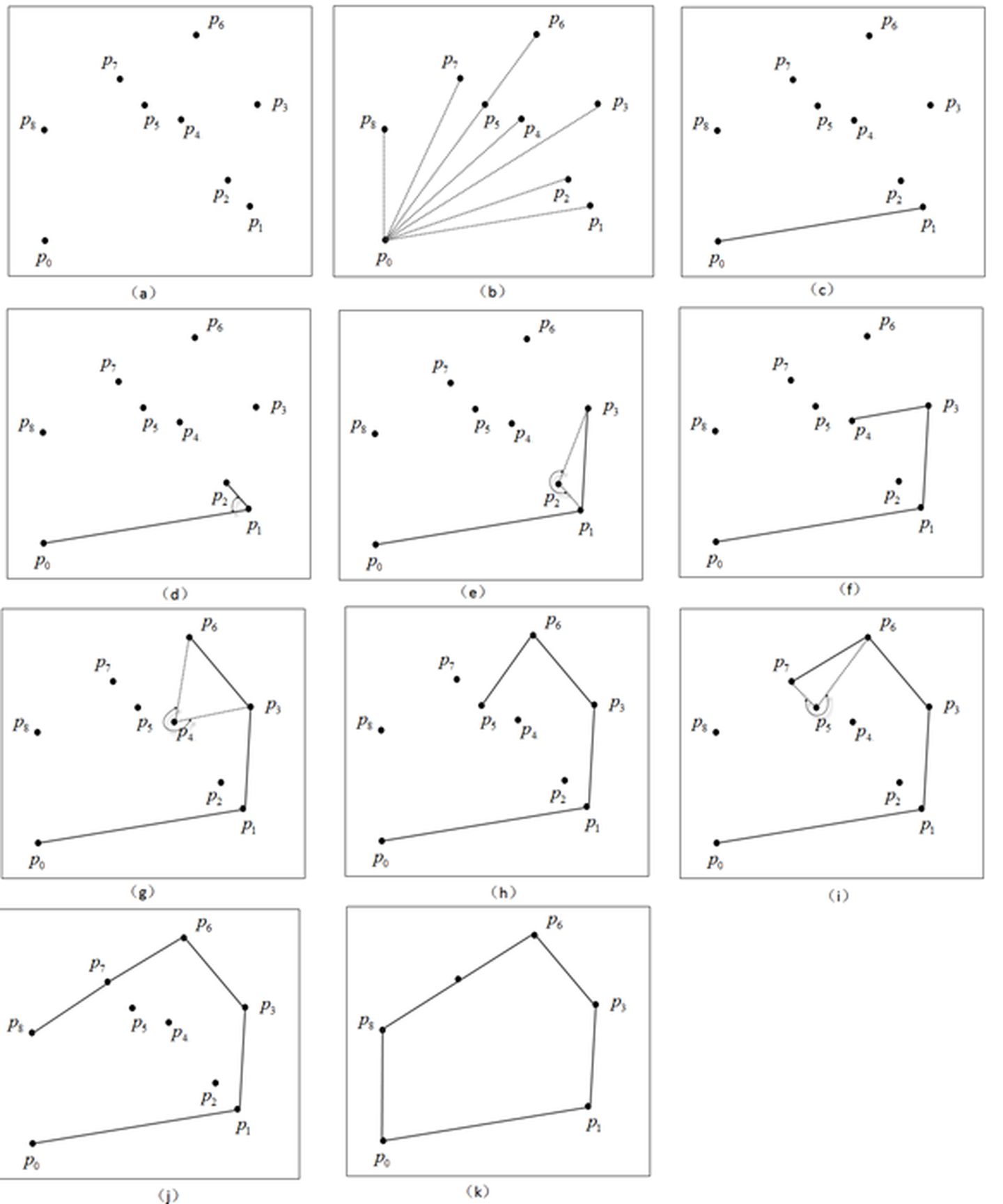
Graham扫描算法会先将点按照极角的大小顺序排列,接着按顺序遍历每个点,通过夹角的大小判断哪些点在凸包上,算法的伪码如下所示:
求给定二维点集的凸包
- 求出最左下角的点,即
分量的值最小点,若
分量最小的点,设为
;
- 剩下的点集,根据极角大小,逆时针排序,得到
;
- 令栈
为空,用
表示栈中第
个元素,用
表示栈中的元素个数;若栈中有
即为栈顶元素;每一次PUSH}操作,栈元素个数
- PUSH(
- PUSH(
);
- for(
;
;
)
- while (
&& 由
,
的夹角
)
- POP(
- end while;
- end for;
- if
, then
- 点集无法生成一个凸包;
- else
- 栈
- end if;
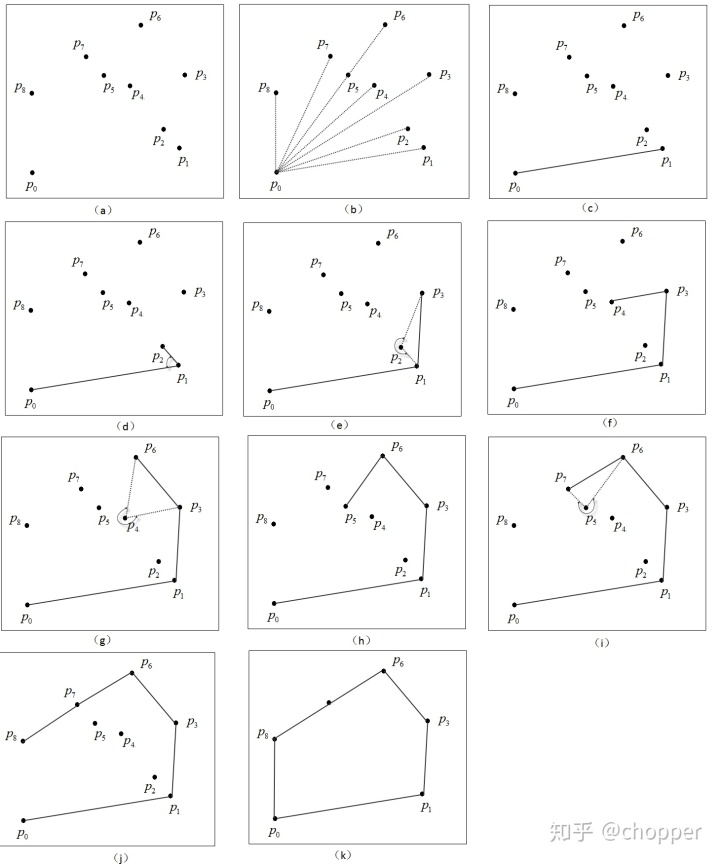
以如图1(a)所示为例,给定一个点集,
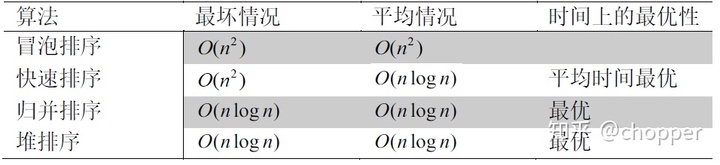
对于对极点的排序,有多种算法实现,比如冒泡排序,快速排序,堆排序等,各种排序的性能对比,如表1的总结。若采用冒泡排序,则Graham扫描算法的复杂度将达到
基础库源码链接,参见这里,下面是前面所描述的算法的实现。
#include "SrGeometricTools.h"
#include "SrDataType.h"
#include <stdio.h>
#include <list>
namespace {
/*
brief 找到最左下角的顶点,最左下角的顶点有多个,则只保留一个顶点。
*/
int GrahamPivot(SrPoint2D* points, int numPoint, int& newNumPoint)
{
int i, minIndex = 0, numIndex = 1;
for (i = 1; i < numPoint; i++)
{
if (EQUAL(points[i].x, points[minIndex].x) && EQUAL(points[i].y, points[minIndex].y))
{
continue;
}
if (LESS(points[i].x, points[minIndex].x))
{
minIndex = numIndex;
}
else if (EQUAL(points[i].x, points[minIndex].x) && LESS(points[i].y, points[minIndex].y))
{
minIndex = numIndex;
}
points[numIndex++] = points[i];
}
newNumPoint = numIndex;
return minIndex;
}
/*
brief 对比极角 p0-pivot-p1:
若极角小于90,return 1;
若极角大于90,return -1;
若极角为0且p0到pivot的距离小于p1到pivot的距离,return 1;
若极角为0且p0到pivot的距离大于p1到pivot的距离,return -1;
否则,p0与p1重叠,return 0。
*/
int GrahamCompare(const SrPoint2D& p0, const SrPoint2D& p1, const SrPoint2D& pivot)
{
SrReal angle = (p0 - pivot).cross(p1 - pivot);
if (EQUAL(angle, 0))
{
SrReal dif = pivot.distanceSquared(p0) - pivot.distanceSquared(p1);
if (EQUAL(dif, 0))
return 0;
return GREATER(dif, 0) ? -1 : 1;
}
return GREATER(angle, 0) ? 1 : -1;
}
/*
brief 采用堆排序,将顶点按照极角从小到大排序。
*/
void GrahamHeapSort(SrPoint2D * points, int numPoint, const SrPoint2D& pivot)
{
SrPoint2D* heap = new SrPoint2D[numPoint + 1];
int i, j, n = numPoint, child;
for (i = 0; i < numPoint; i++)
heap[i + 1] = points[i];
//build a minimum heap.
SrPoint2D y;
for (i = numPoint / 2; i >= 1; i--)
{
y = heap[i];
child = 2 * i;
while (child <= numPoint)
{
if (child < numPoint&&GrahamCompare(heap[child], heap[child + 1], pivot) < 0)/*heap[child]>heap[child+1]*/
child++;
if (GrahamCompare(y, heap[child], pivot) >= 0)
break;
heap[child / 2] = heap[child];
child *= 2;
}
heap[child / 2] = y;
}
//Pop the head of heap and update the minimum heap.
int indx = 0;
for (j = 1; j <= numPoint; j++)
{
y = heap[n--];
points[indx++] = heap[1];
i = 1, child = 2;
while (child <= n)
{
if (child < n&&GrahamCompare(heap[child], heap[child + 1], pivot) < 0)
child++;
if (GrahamCompare(y, heap[child], pivot) >= 0)
break;
heap[i] = heap[child];
i = child;
child *= 2;
}
heap[i] = y;
}
delete[]heap;
}
/*
brief 采用Graham扫描线法计算凸包。
*/
void GrahamScanHull(const SrPoint2D* pPoints, int numPoints, std::list<SrPoint2D>& result)
{
int i;
SrPoint2D* buffer = new SrPoint2D[numPoints];
for (i = 0; i < numPoints; i++)
buffer[i] = pPoints[i];
int newNumPoints;
int minIndex = GrahamPivot(buffer, numPoints, newNumPoints);
SrPoint2D pivot;
pivot = buffer[minIndex];
buffer[minIndex] = buffer[0];
buffer[0] = pivot;
GrahamHeapSort(buffer + 1, newNumPoints - 1, pivot);
result.push_back(buffer[0]);
result.push_back(buffer[1]);
std::list<SrPoint2D>::iterator last, current;
for (i = 2; i < newNumPoints; i++)
{
while (result.size() >= 2)
{
last = result.end();
last--;
current = last;
last--;
if (LEQUAL((buffer[i] - *current).cross(*last - *current), 0))
result.pop_back();
else
break;
}
result.push_back(buffer[i]);
}
delete[]buffer;
}
/*
brief 用于判断给定的多边形是否是凸包
*/
bool InitConvex(const SrPoint2D* point, int numPoint, int &mNumVertex, SrPoint2D*& mVertex)
{
if (numPoint <= 2)
return false;
int i;
std::list<SrPoint2D> result;
GrahamScanHull(point, numPoint, result);
mNumVertex = result.size();
if (mNumVertex <= 2)
{
mNumVertex = 0;
return false;
}
mVertex = new SrPoint2D[mNumVertex];
std::list<SrPoint2D>::iterator iter;
for (iter = result.begin(), i = 0; iter != result.end(); iter++, i++)
mVertex[i] = *iter;
return true;
}
/*
brief Compare the 2d points lexicographically.p<q <==> (px<qx) or ((px=qx)and(py<qy)).
return If pi<pj, return 1;
If pi>pj, return -1;
If pi==pj,return 0;
*/
int CompareVertex(const SrPoint2D& p0, const SrPoint2D& p1)
{
if (LESS(p0.x, p1.x)) return 1;
if (GREATER(p0.x, p1.x)) return -1;
if (LESS(p0.y, p1.y)) return 1;
if (GREATER(p0.y, p1.y)) return -1;
return 0;
}
/*
brief 判断多边形是否是凸多边形
*/
bool IsConvex(SrPoint2D* vertex, int numVertex)
{
int last, current, next;
int sign = CompareVertex(vertex[numVertex - 1], vertex[0]), tmpSign;
int signChange = 0;
for (last = 0, current = 1; current < numVertex; last = current, current++)
{
tmpSign = CompareVertex(vertex[last], vertex[current]);
if (tmpSign == 0)
return false;
if (tmpSign != signChange)
{
signChange = tmpSign;
signChange++;
if (signChange > 2)
return false;
}
}
bool isGreater = false;
SrReal angle;
for (last = numVertex - 2, current = numVertex - 1, next = 0; next < numVertex; last = current, current = next, next++)
{
angle = (vertex[next] - vertex[current]).cross(vertex[last] - vertex[current]);
if (LESS(angle, 0))
return false;
else if (!isGreater && GREATER(angle, 0))
isGreater = true;
}
if (isGreater)
return true;
//Degenerate case.
return false;
}
}
void TestGrahamConvex()
{
int numPoint = 10000, numCase = 100;
int cs = 0;
SrPoint2D* points = new SrPoint2D[numPoint];
while (numCase--)
{
int i;
for (i = 0; i < numPoint; i++)
{
points[i].x = rand() % 1000;
points[i].y = rand() % 1000;
}
SrPoint2D* result = NULL;
int numResult;
InitConvex(points, numPoint, numResult, result);
if (IsConvex(result, numResult))
printf("Case %d Succeeds!n", ++cs);
else
printf("Case %d Fails!n", ++cs);
delete[]result;
}
delete[]points;
}
int main()
{
TestGrahamConvex();
return 0;
}















 3320
3320











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









