






前言:仿真的整体思路,先启动仿真环境,再启动导航功能。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch
roslaunch mrobot_laser_nav_gazebo.launch
二、启动导航功能
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch
roslaunch fake_nav_cloister_demo.launch
三、启动自主导航
rosrun mrobot_navigation random_navigation.py
-------------------------------------------
效果如下:
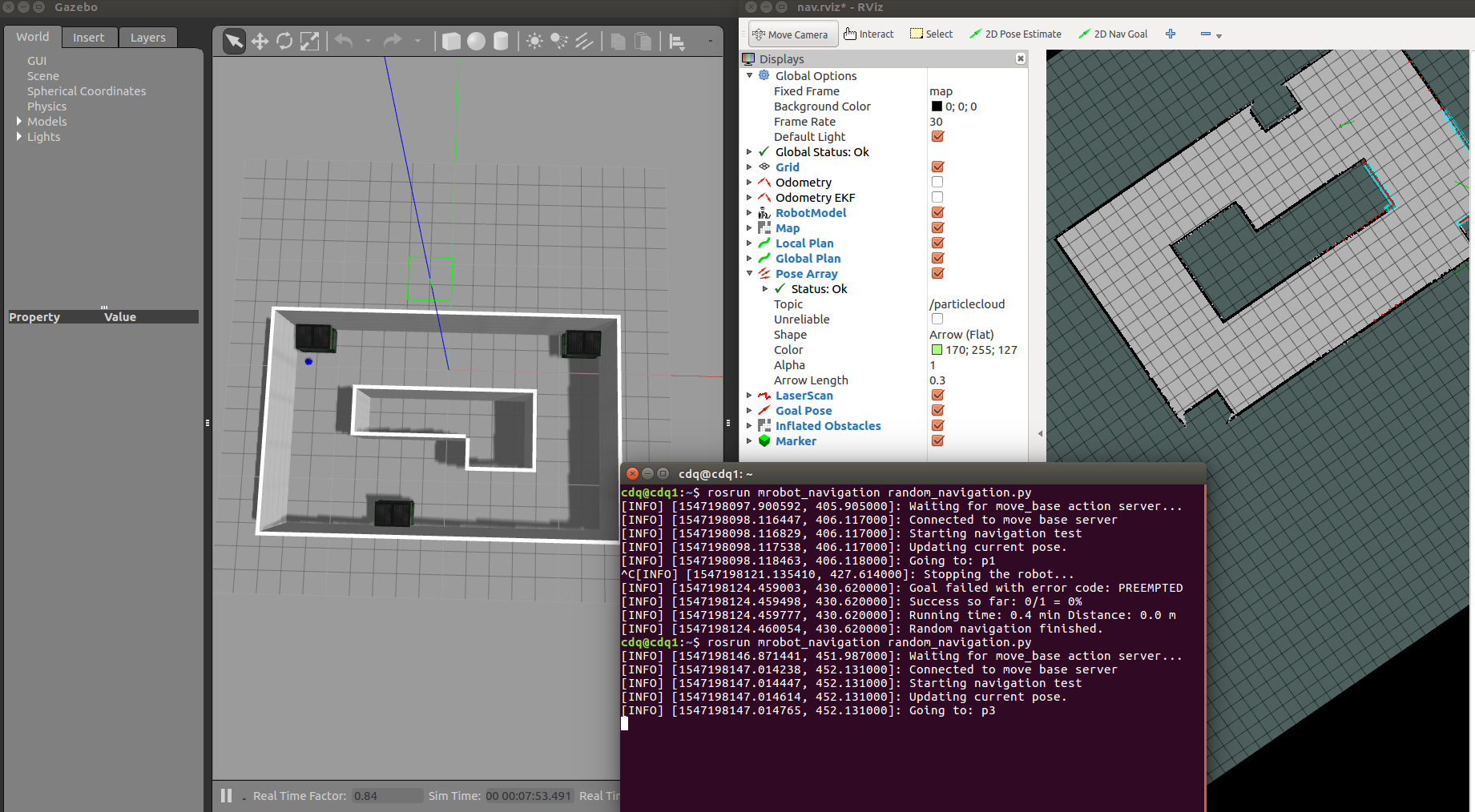
我们也可以在机器人路径上动态加入一些模型,来测试机器人的导航功能。
-END-















 5214
5214











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









