






2.1引子:小萝卜的例子
1. 惯性测量单元(Inertial Measurement Unit, IMU)
2. 按照工作方式的不同,相机可以分为单目相机(Monocular)、双目相机(Stereo)、和深度相机(RGB-D)三大类。
3. RGB-D除了能够采集到彩色图片之外,还能够读出每个像素与相机之间的距离。
单目相机
只使用一个摄像头进行SLAM的做法称为单目SLAM(Monocular SLAM)。
双目相机和深度相机
深度相机的最大特点是可以通过红外结构光或Time-of-Flight(ToF)原理,像激光传感器那样,通过主动向物体发射光并接收返回的光,测出物体与相机之间的距离。
2.2经典视觉SLAM框架
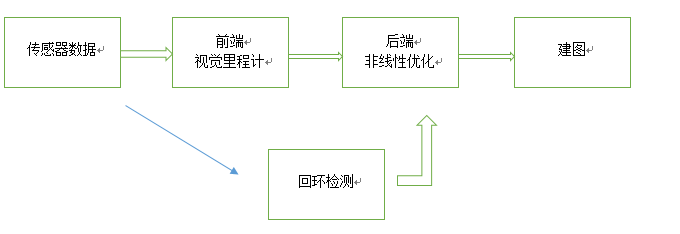
整体视觉SLAM流程图
整个视觉SLAM流程包括以下步骤。
1. 传感器信息获取。相机图像信息的预处理
2. 视觉里程计(Visual Odometry, VO)。视觉里程计的任务是估算相邻图像间相机的运动,以及局部地图的样子。VO又称为前端(Front End)。
3. 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测信息,对它们进行优化,得到全局一致的轨迹和地图。
4. 回环检测(Loop Closing)。回环检测判断机器人是否到达过先前的位置。
5. 建图(Mapping)。它会根据估计的轨迹,建立与任务要求对应的地图。
VO能够通过相邻帧间的图像估计相机运动,并恢复场景的空间结构。
在视觉SLAM中,前端和计算机视觉领域更为相关,比如图像的特征提取与匹配等,后端则主要是滤波与非线性优化算法。
SLAM问题的本质:对运动主体和周围环境空间不确定性的估计。
回环检测,又称闭环检测(Loop Closure Detectioon),主要解决位置估计随时间漂移的问题。
度量地图(Metric Map):
度量地图强调精确地表示地图中物体的位置关系,通常用稀疏(Sparse)与稠密(Dense)对其分类。
拓扑地图(Topological Map):
拓扑地图更加强调地图元素之间的关系。















 225
225











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









