







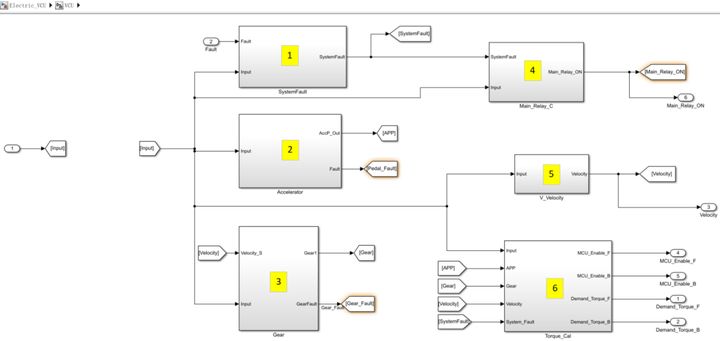
下面依次通过每个子系统的详细介绍来说明simulink常用的模块。
- 系统错误 SystemFault
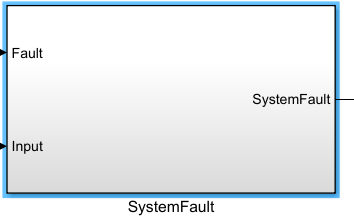
SystemFault子层又包含1-1、1-2、1-3、1-4四个子系统,我们先对这一层级用到的一些模块进行讲解。
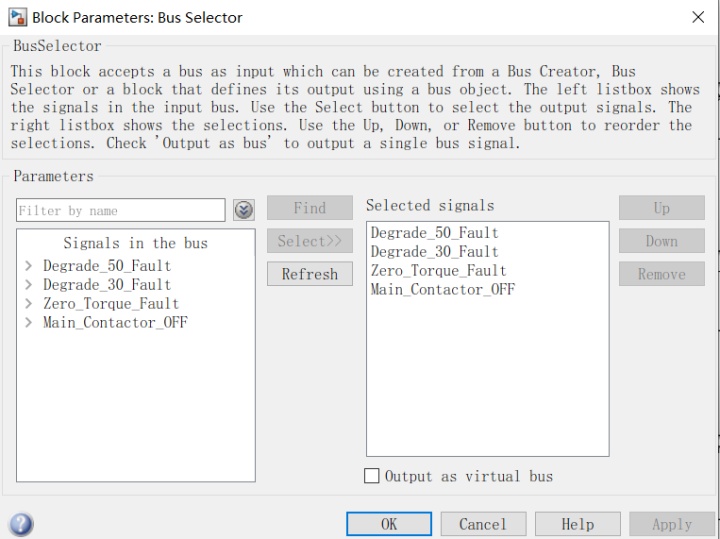
Bus Selector模块
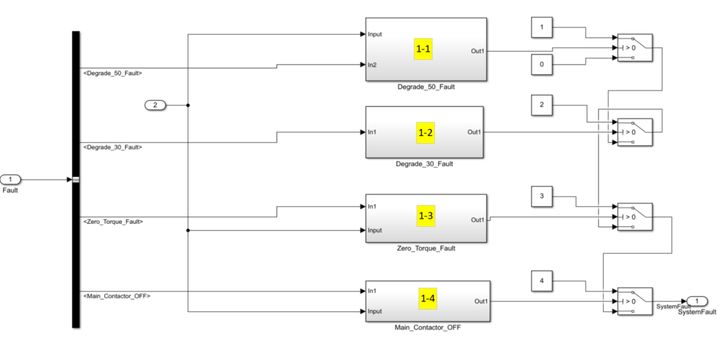
该子层系统标示为Fault的输入模块是将之前总线上的相关错误信号汇总到一起的集合,而在这个子层系统中并不需要用到这么多信号,所以通过Bus Selector进行选择性使用。(使用方法和Bus Creator类似。)

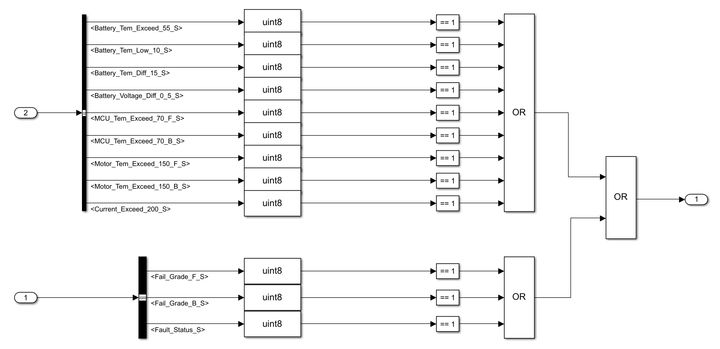
选择出来的信号会分别送入1-1~1-4这几个子系统,其里面的结构我们稍后再讲,先看下最右边的选择开关模块。
Switch模块

模块从上至下有三个输入端口,中间为选择判断端口,即中间判断条件若为真,则模块输出上面端口的值,判断条件若为假,则模块输出下面端口的值。图中举例:若中间过来的输入信号大于0,则输出1,若小于或等于0则输出0。(显示1和0的两个方框是Constant常数模块)
下面是switch模块的参数设置对话框:
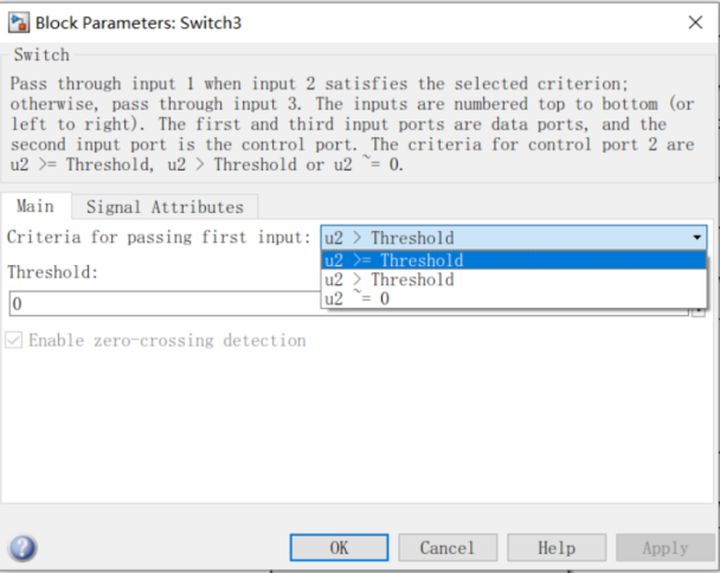
Criteria for passing first input: 条件关系设置选项,可以选择不同的判断方法;
Threshold: 阈值设置(如上面模型里面设置的值为0);
接下一起看下1-1到1-4这几个子系统。
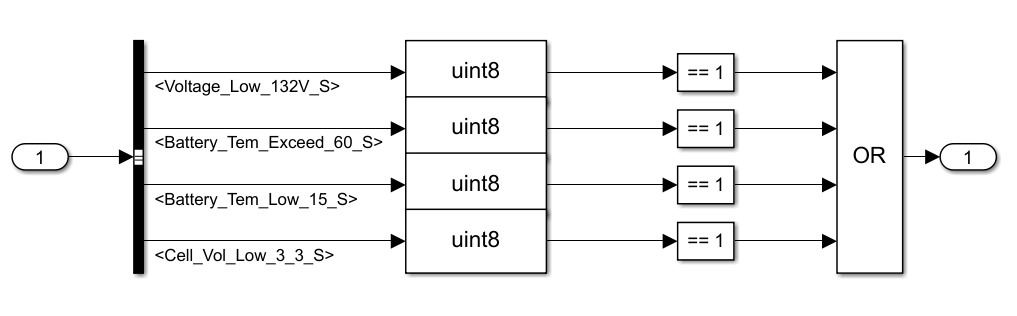
1-1 Degrade_50_Fault
这里边又出现了几个新的模块
Data Type Conversion模块
显示uint8的是数据类型转换模块(Data Type Conversion),当前一个模块的输出和后一个模块的输入数据类型不一致时Simulink会报错,这时就需要进行数据类型转换,以保持前后输出输入数据类型一致。
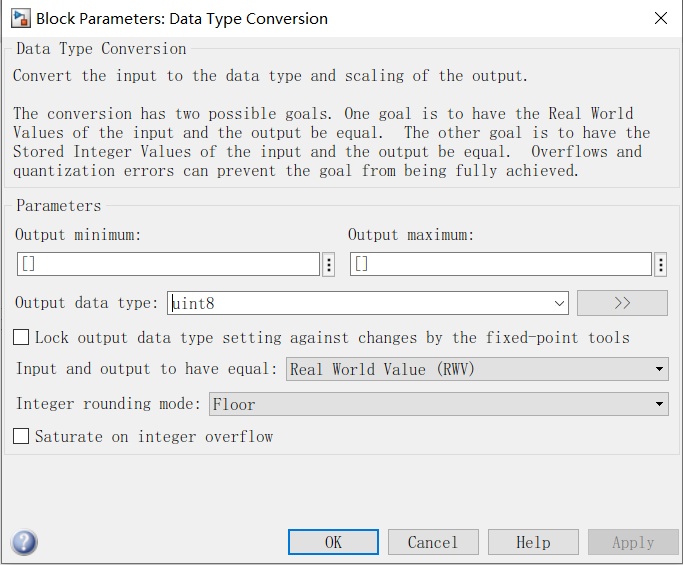
Output data type: 输出数据类型(unit8是无符号8位整数);
Input and output to have equal:选择实际值还是存储值进行数据转换。(RWV是实际值)
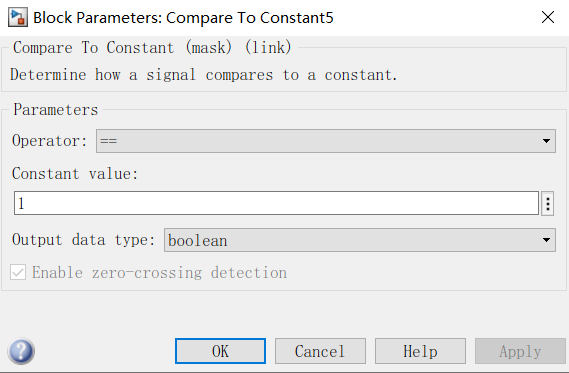
Compare to constant模块
显示==1的方框是常数比较模块,可以在operator运算符里面选择不同的关系运算符。若比较结果为真则输出1, 比较结果为假则输出0。
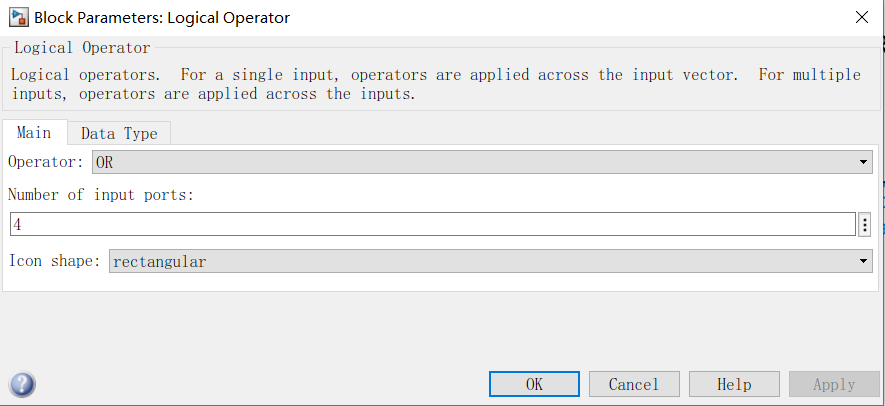
Logical Operator模块
显示OR的长方形模块是以后经常要用到的一个模块,关系操作模块(Logical Operator)。它集中了各种比较功能,这些比较功能都可以在operator选项中进行相应的选择。
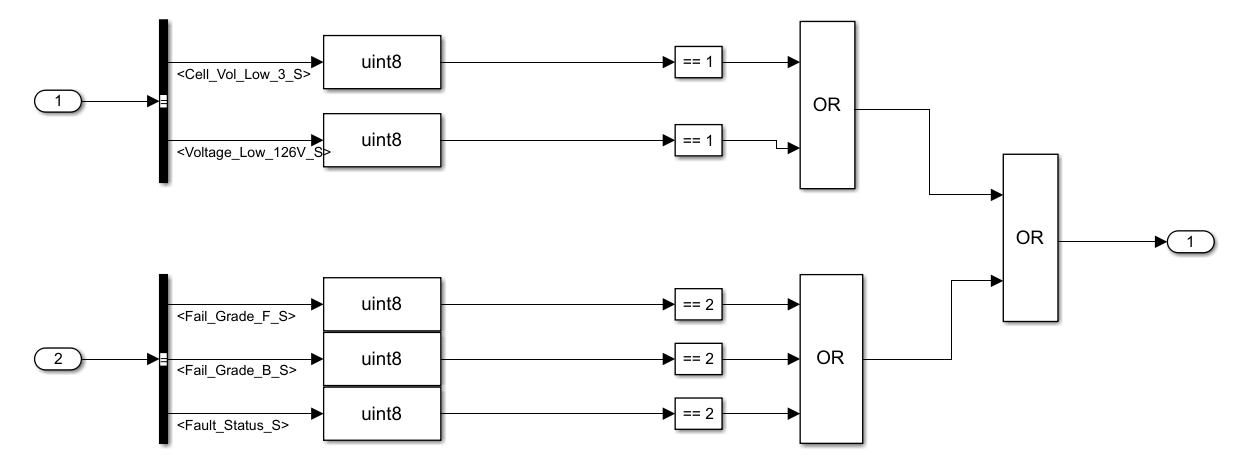
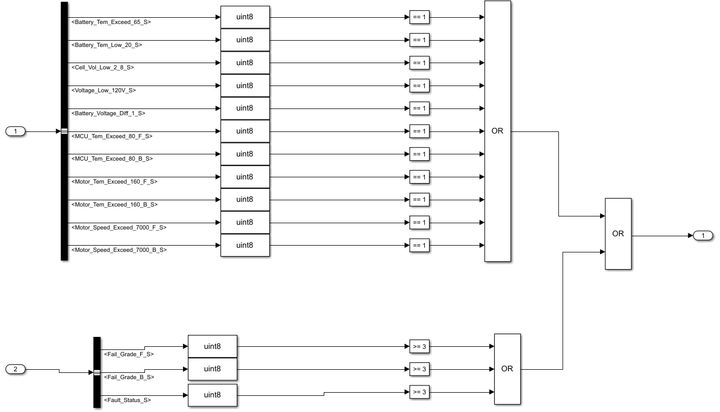
下面1-2到1-4三个子系统中未使用新的模块,所以下面只是放下模型,不做过多解释。
1-2 Degrade_30_Fault
1-3 Zero_Torque_Fault
1-4 Main_Contactor_OFF















 2760
2760











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









