






一、简单介绍树莓派的GPIO口
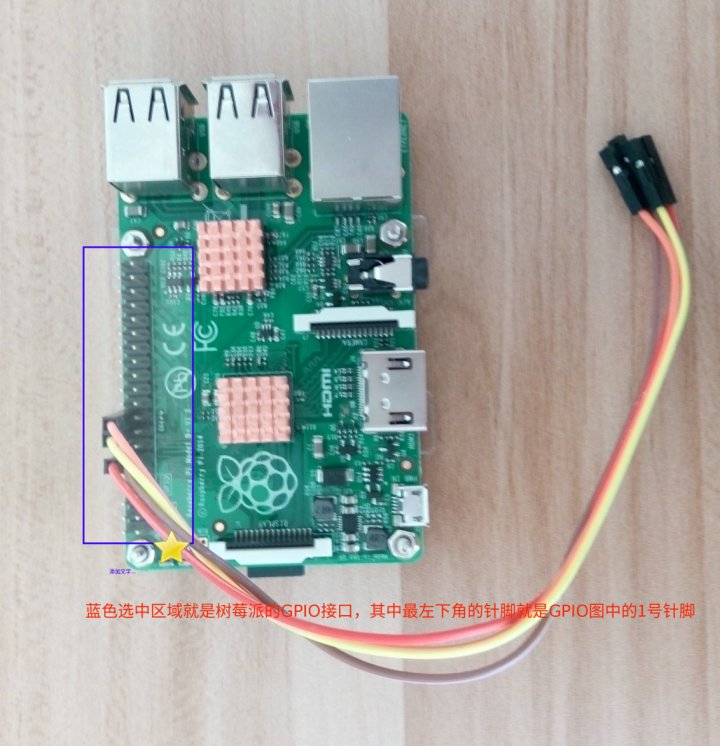
上图是树莓派2代的接口(不同型号接口会有差异),我们就以此为例来说下这些接口。
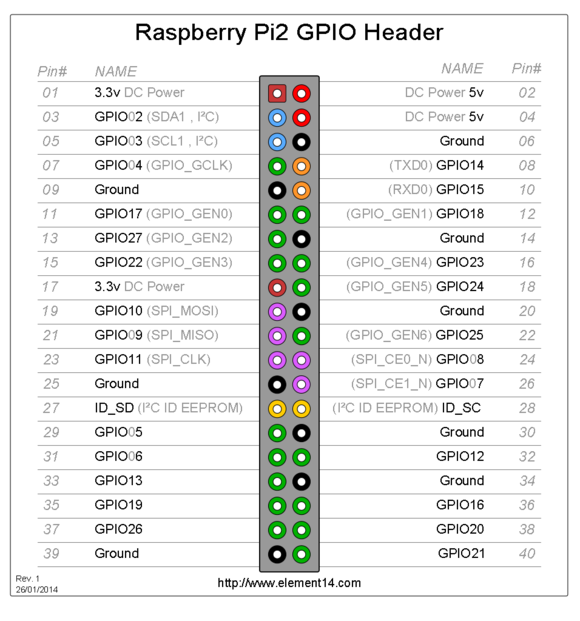
1、GPIO介绍
GPIO 英文全称是:General-purpose input/output 通用型之输入输出的简称,其接脚可以供使用者由程控自由使用,PIN脚依现实考量可作为通用输入(GPI)或通用输出(GPO)或通用输入与输出(GPIO)。通过这些GPIO口,我们可以控制很多第三方的寄存器设备,简单来说我们可以通过这些I/O口控制一些芯片的电路、读取传感器的数值等。
2、所需材料
| 材料名称 | 数量 |
|---|---|
| 树莓派2代板子(包含电源、数据线、存储卡) | 1 |
| 智能小车底盘(包含四个直流电机) | 1 |
| 移动电源 | 1 |
| L298N电机驱动板 | 1 |
| 杜邦线母对公 | 10 |
| 杜邦线母对母 | 10 |
| 无线网卡 | 1 |
| 4孔或6孔电池盒 | 1 |
3、安装所需软件
树莓派官方有两套GPIO的python库,分别是RPi.GPIO和RPIO。现在网络上许多关于树莓派GPIO文档的教程多数是RPi.GPIO,这个是老版本的库。而RPIO是用来替代前者的新版本。后面的课程我将使用RPIO这个库,来给大家演示。下面安装RPIO:
sudo apt-get install python-dev python-pip
sudo pip install RPIO
二、 树莓派与L298N线路连接
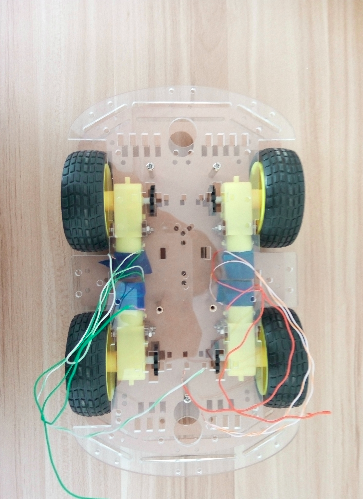
1、第一步组装小车
组装底盘 分别用铜线连接两侧电机,并且保证同侧转向一致。如下图:
连接电机与L298N 将两侧侧的电机分别接入L298N的输出A和输出B,见下图:

连接L298N与树莓派 见上图逻辑输入部分有4个针脚(IN1、IN2、IN3、IN4),按照顺序分别连接到树莓派接口的11、12、16、18 四个口。见下图蓝色部分:
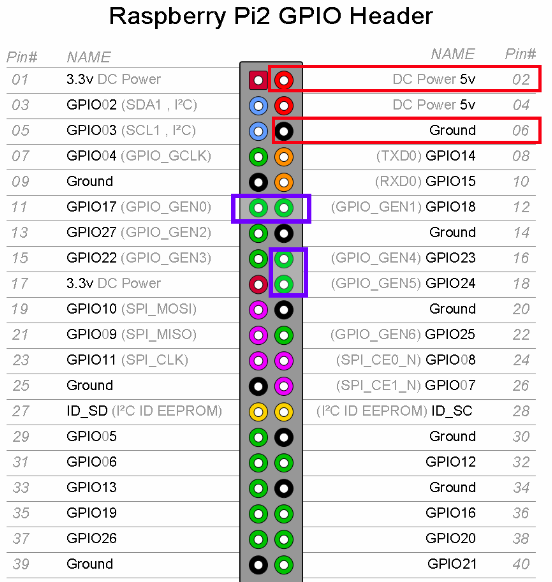
除了上面这些,还要将L298N的供电GND和树莓派的GPIO的6号Ground连接,形成供电回路。
连接电池盒与移动电源 将电池盒的正极连接到L298N的12V供电口,负极连接到L298N的供电GND口。完成连接后,L298N的供电GND口连接了两个线,分别是电池盒的负极和树莓派的6号Ground口。
2、测试小车
登录树莓派,vim robot.py文件:
import RPIO as GPIO
import time
IN1 = 11
IN2 = 12
IN3 = 16
IN4 = 18
def init():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
def forward():
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.HIGH)
GPIO.output(IN4,GPIO.LOW)
if __name__ == '__main__':
init()
forward()
time.sleep(5)
GPIO.cleanup()
保存退出后,用sudo python robot.py执行命令,小车将会向前进5秒。
备注:1、要避免静电和短路。2、接线要小心,尤其是正负极接线。
三、使用Python控制小车
1、Tornado介绍
Tornado是使用Python编写的一个强大的、可扩展的Web服务器。它在处理严峻的网络流量时表现得足够强健,但却在创建和编写时有着足够的轻量级,并能够被用在大量的应用和工具中。
2、Tornado安装
$ curl -L -O https://github.com/facebook/tornado/archive/v3.1.0.tar.gz
$ tar xvzf v3.1.0.tar.gz
$ cd tornado-3.1.0
$ python setup.py build
$ sudo python setup.py install
Tornado官方并不支持Windows,但你可以通过ActivePython的PyPM包管理器进行安装,类似如下所示:
C:\> pypm install tornado
2、robot.py文件:
#!/usr/bin/python
#coding: utf8
import RPIO as GPIO
import time
import sys
import threading
import tornado.ioloop
import tornado.web
import tornado.httpserver
import tornado.options
import json
tornado.options.define("port",default=8000,type=int)
IN1 = 11
IN2 = 12
IN3 = 16
IN4 = 18
stop_status = 0
last_key = ""
last_request_time = 0
def init():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(IN1,GPIO.OUT)
GPIO.setup(IN2,GPIO.OUT)
GPIO.setup(IN3,GPIO.OUT)
GPIO.setup(IN4,GPIO.OUT)
# 前进
def forward():
global stop_status
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.HIGH)
GPIO.output(IN4,GPIO.LOW)
# print "forward"
# time.sleep(0.1)
# 后退
def reverse():
global stop_status
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.HIGH)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.HIGH)
# 左转弯
def left():
global stop_status
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.HIGH)
GPIO.output(IN3,GPIO.HIGH)
GPIO.output(IN4,GPIO.LOW)
# 右转弯
def right():
global stop_status
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.HIGH)
#停止
def stop_car():
GPIO.output(IN1,False)
GPIO.output(IN2,False)
GPIO.output(IN3,False)
GPIO.output(IN4,False)
global stop_status
stop_status = 1
#关闭GPIO接口
def close_car():
global stop_status
stop_status = 1
GPIO.cleanup()
class IndexHandler(tornado.web.RequestHandler):
def set_default_headers(self):
self.set_header('Access-Control-Allow-Origin', '*')
self.set_header('Access-Control-Allow-Methods', 'POST, GET, OPTIONS')
self.set_header('Access-Control-Allow-Headers', '*')
def get(self):
self.render("index.html")
def post(self):
global stop_status
global last_key
global last_request_time
old_request_time = last_request_time
init()
sleep_time = 0.1
try:
arg = self.get_argument('k')
new_request_time = self.get_argument('time')
print 'get last time',new_request_time
except Exception, e:
arg = json.loads(self.request.body)['k']
new_request_time = json.loads(self.request.body)['time']
print 'json last time', new_request_time
print "==new time ==", new_request_time
print "==old time ==", old_request_time
if(arg=='w' and last_key!='w' and new_request_time >= old_request_time):
print "forward"
stop_status = 0
autoThread = threading.Thread(target = forward)
autoThread.start()
last_key = 'w'
elif(arg=='s' and last_key!='s' and new_request_time >= old_request_time):
print "reverse"
stop_status = 0
autoThread = threading.Thread(target = reverse)
autoThread.start()
last_key = 's'
elif(arg=='a' and last_key!='a' and new_request_time >= old_request_time):
print "left"
stop_status = 0
autoThread = threading.Thread(target = left)
autoThread.start()
last_key = 'a'
elif(arg=='d' and last_key!='d' and new_request_time >= old_request_time):
print "right"
stop_status = 0
autoThread = threading.Thread(target = right)
autoThread.start()
last_key = 'd'
elif(arg=='stop' and new_request_time >= old_request_time):
print "stop"
last_key = "stop"
time.sleep(0.3)
stop_car()
else:
print "error"
last_request_time = new_request_time
self.write(arg)
def options(self):
pass
if __name__ == '__main__':
tornado.options.parse_command_line()
app = tornado.web.Application(handlers=[(r"/",IndexHandler)])
http_server = tornado.httpserver.HTTPServer(app)
http_server.listen(tornado.options.options.port)
tornado.ioloop.IOLoop.instance().start()
3、index.html文件:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<title>WIFI小车客户端</title>
<script src="http://libs.baidu.com/jquery/1.9.0/jquery.js"></script>
</head>
<body>
<script type="text/javascript">
function go(k){
var requestTime= new Date().getTime();
$.post('/',{k:k,time:requestTime},function(){},"json");
}
$(function(){
var i = null;
window.document.onkeydown = keyDown;
function keyDown(env){
env = (env) ? env : window.event;
if(env.keyCode=='87'){
go('w');
}
if(env.keyCode=='83'){
go('s');
}
if(env.keyCode=='65'){
go('a');
}
if(env.keyCode=='68'){
go('d');
}
};
window.document.onkeyup = keyUp;
function keyUp(env){
env = (env) ? env : window.event;
if(env.keyCode=='87'){
go('stop');
}
if(env.keyCode=='83'){
go('stop');
}
if(env.keyCode=='65'){
go('stop');
}
if(env.keyCode=='68'){
go('stop');
}
}
$('.before').mousedown(function(){
i = setInterval(function(){
go('w');
},100);
});
$('.left').mousedown(function(){
i = setInterval(function(){
go('a');
},100);
});
$('.right').mousedown(function(){
i = setInterval(function(){
go('d');
},100);
});
$('.cabk').mousedown(function(){
i = setInterval(function(){
go('s');
},100);
});
$('#main span').mouseup(function(){
clearInterval(i);
go('stop');
});
});
</script>
<style type="text/css">
#main{width: 150px;height: 150px;background: #ccc;}
#main span{width: 50px;height: 50px;float: left;z-index: 999;}
#main span.on2{background: #ff00ff;}
</style>
<div id="main">
<span></span>
<span class="on2 before"></span>
<span></span>
<span class="on2 left"></span>
<span></span>
<span class="on2 right"></span>
<span></span>
<span class="on2 cabk"></span>
<span></span>
</div>
</body>
</html>
在命令行里尝试运行这个程序以测试输出:
$ sudo python robot.py
在本地浏览器中打开http://localhost:8000,或者其他计算机使用浏览器中打开http://PI的IP:8000/
四、远程控制小车
ionic环境搭建
安装ionic
npm install -g cordova ionic
克隆小车客户端代码
git clone https://github.com/jingzhaoyang/AutoClient.git
编译代码
#添加平台
ionic platform add android
#编译android的apk安装包
ionic build android
#启动android模拟器
ionic emulate android
在build目录有编译好的apk文件,可以直接在Android平台直接使用。并且通过终端控制小车。















 4868
4868











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









