






本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/50261943 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,机器手臂
开始想做机器人,发现难度比较大,选择一个比较容易的入手开始做。
做一个最简单的手臂。
但是,不是购买材料组装,而是自己设计。
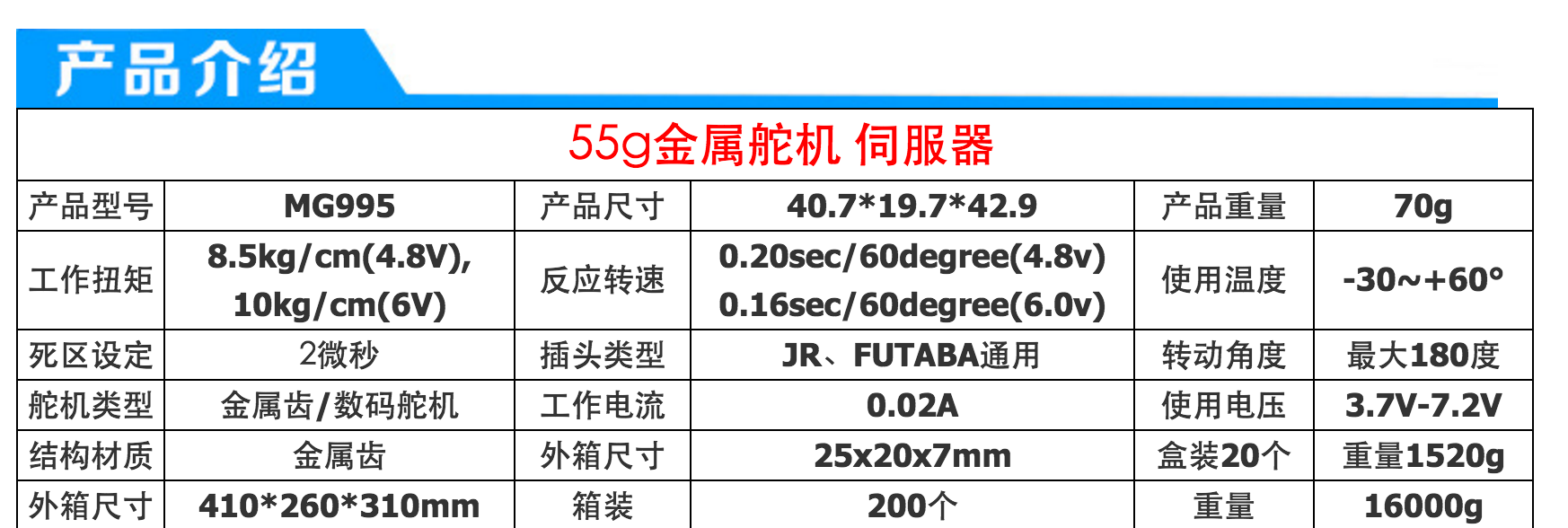
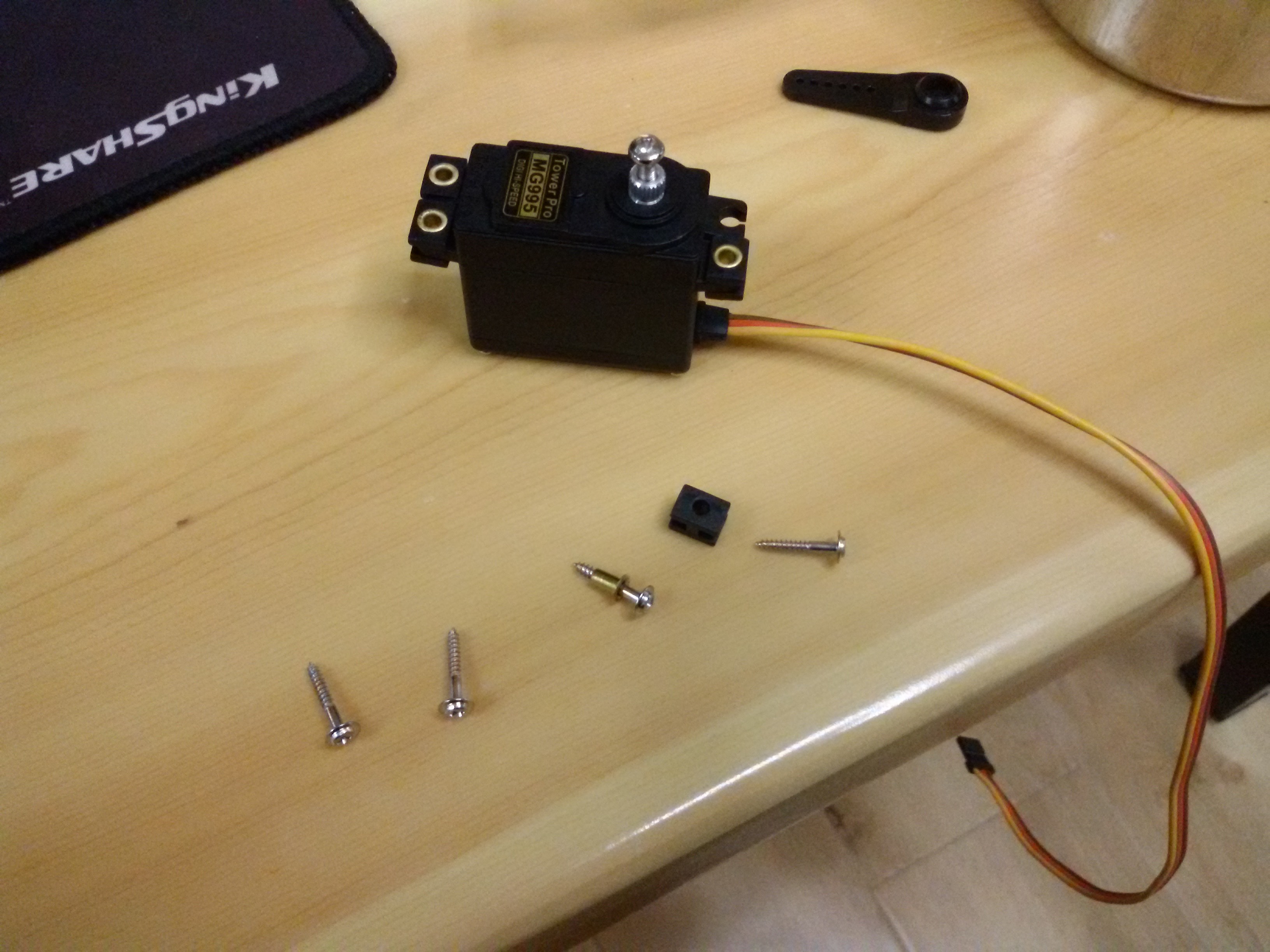
2,首先了解下舵机
自己购买的舵机,还没有接通电呢。发现给的几个配件都不错。
有橡胶垫,有小铜管,螺丝。
只要设计好支架就行。
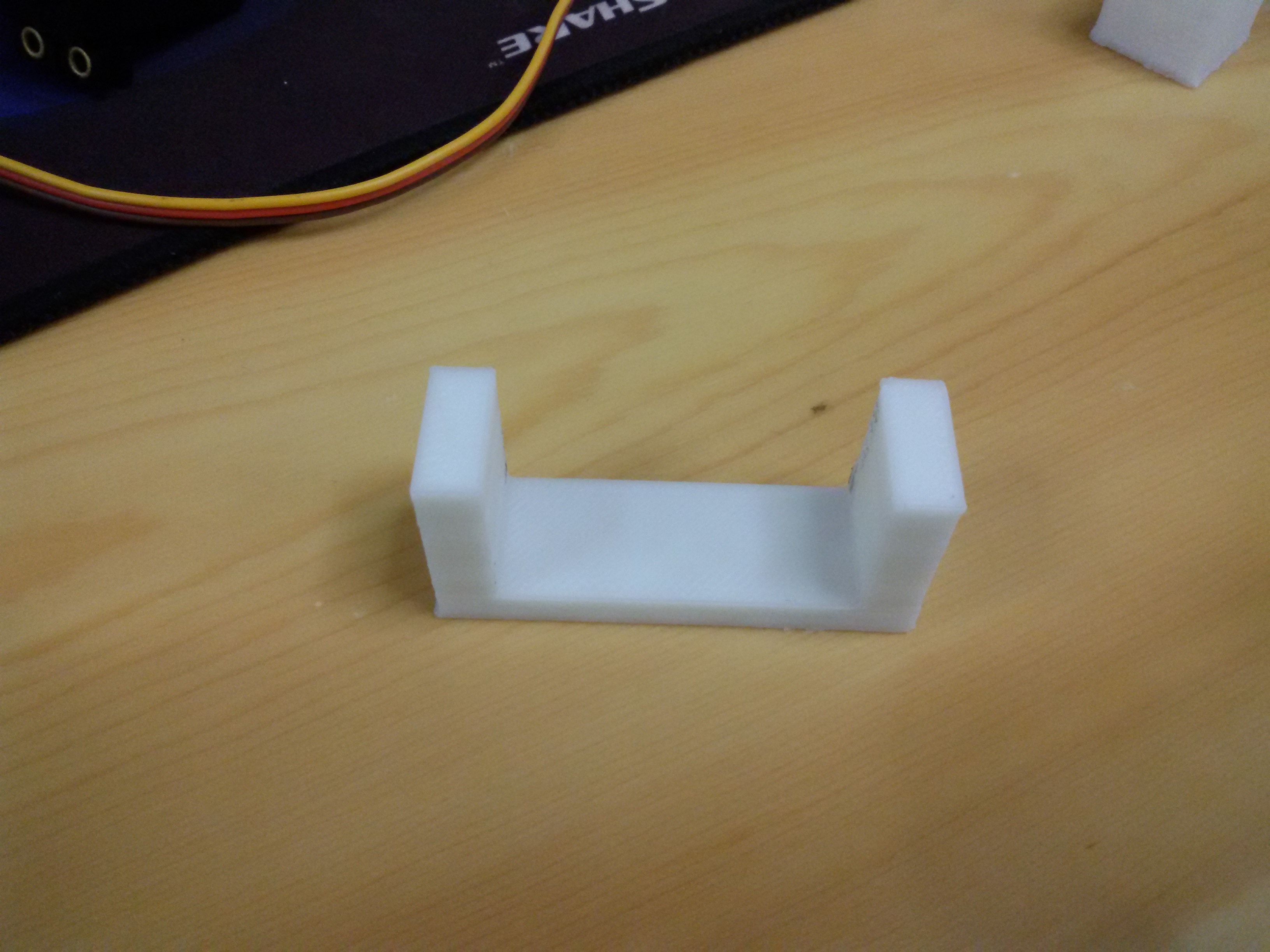
按照舵机的尺寸打印了下零件,发现有点小,误差在1mm。
虽然可以塞进去,但是还是有点紧。


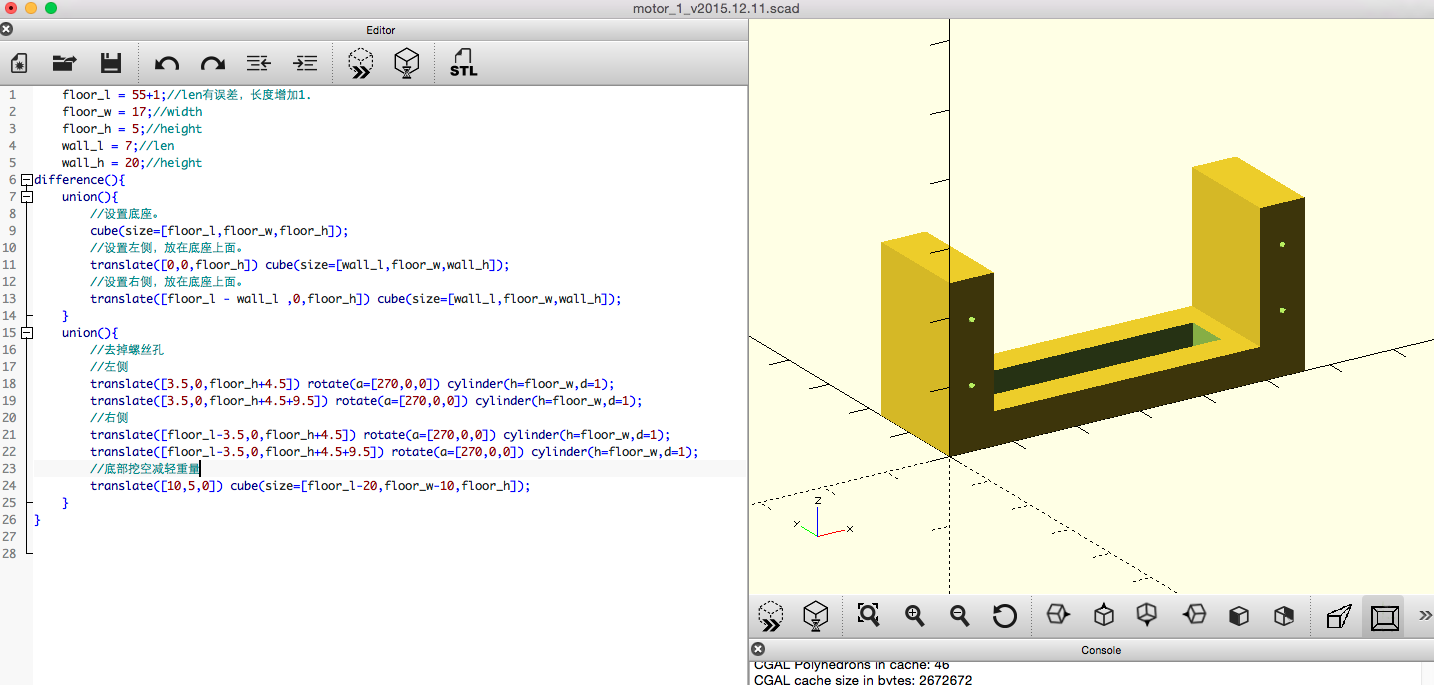
3,OpenSCAD设计图
设计的源代码:
floor_l = 55+1;//len有误差,长度增加1.
floor_w = 17;//width
floor_h = 5;//height
wall_l = 7;//len
wall_h = 20;//height
difference(){
union(){
//设置底座。
cube(size=[floor_l,floor_w,floor_h]);
//设置左侧,放在底座上面。
translate([0,0,floor_h]) cube(size=[wall_l,floor_w,wall_h]);
//设置右侧,放在底座上面。
translate([floor_l - wall_l ,0,floor_h]) cube(size=[wall_l,floor_w,wall_h]);
}
union(){
//去掉螺丝孔
//左侧
translate([3.5,0,floor_h+4.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1);
translate([3.5,0,floor_h+4.5+9.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1);
//右侧
translate([floor_l-3.5,0,floor_h+4.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1);
translate([floor_l-3.5,0,floor_h+4.5+9.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1);
//底部挖空减轻重量
translate([10,5,0]) cube(size=[floor_l-20,floor_w-10,floor_h]);
}
}主要就是长方体组合和挖洞。
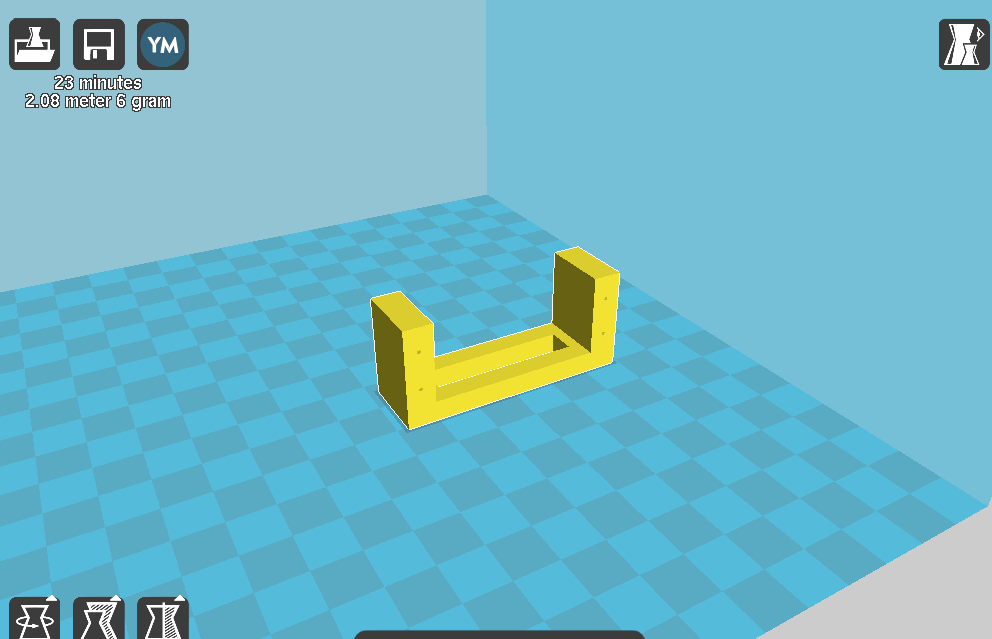
然后导出成stl文件。使用Cura进行打印。
这次刚刚好,还将底部挖了个洞,减轻重量,节省材料。
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/50261943 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
4,总结
使用openscad进行设计还是非常方便的。
可以做一个舵机支架,螺丝孔,位置,都可以自己设计。
打印这样一个小零件只需要 20 分钟,零件也很坚固。
效率非常高,能很好的利用3d打印的优势,但是由于自己组装的打印机有误差,所以需要调整下才能做出合适的零件。
openscad非常适合程序员进行编程,就像写代码一样设计3d零件。















 747
747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









